
Fターム[3J552PA35]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 目的(一般) (9,045) | 車両関係 (1,319) | 登坂走行性能 (65)
Fターム[3J552PA35]に分類される特許
41 - 60 / 65
マニュアルモード付き無段変速装置
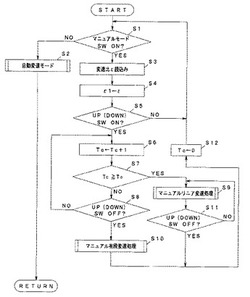
【課題】部品点数を増やすことなく、マニュアルモード時の変速比を素早く可変設定するマニュアル有段変速処理と、変速比を任意に設定するマニュアルリニア変速処理とを自在に選択できるようにする。
【解決手段】セレクトレバー43をサブゲート44b側へ移動させてマニュアルモードスイッチ37をONすると、現在の変速比εが固定変速比ε1として固定される(S4)。そしてアップシフトスイッチ35a或いはダウンシフトスイッチ35bのON時間Tcが短押し判定時間Toよりも短い場合はマニュアル有段処理が実行され(S10)、又ON時間Tcが短押し判定時間Toを越えたときはマニュアルリニア変速処理が実行される(S9)。
(もっと読む)
車両用駆動力制御装置

【課題】車両の走行に影響を与える外乱に対応して、車両の駆動力を制御する車両用駆動力制御装置において、運転者にとってより適切な量の駆動力補正を行うことが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の走行に影響を与える外乱に対応して、車両の駆動力を制御する車両用駆動力制御装置において、運転者の指向を推定又は検出する運転者指向推定検出手段と、前記運転者の指向に基づいて、予め設定されている駆動力特性を変更する制御手段とを備えている。前記運転者の指向が車両の走行性能を重視したものであると判断された場合には、前記運転者の指向が車両の走行性能を重視したものであると判断されない場合に比べて、前記駆動力特性の変更量が大きくされることを特徴としている。
(もっと読む)
鞍乗型車両
【課題】選択された運転モードに関係なく、簡単な操作で急加速することができる鞍乗型車両を提供することである。
【解決手段】制御装置10は、複数の運転モード(A、B)を相互に切り替える第1制御と、複数の運転モード(A、B)のうちの少なくとも2つの運転モードの各々において、シフトダウン操作子30の操作に応じて、当該運転モード(A、B)の変速比をLow側にシフトするキックダウン状態(A1、B1)に移行させる第2制御とを実行することを特徴とする、鞍乗型車両100である。
(もっと読む)
車両、車両の制御装置および車両の制御方法
【課題】駆動装置の保護と駆動要求の達成とが両立された車両を提供する。
【解決手段】車両1は、車輪38に駆動力を与える駆動装置11と、車輪38に制動力を与える制動装置88と、駆動装置11と制動装置88を制御する制御装置50とを備える。制御装置50は、車両1の進行方向と駆動力の作用する方向が逆方向である場合に、駆動力要求(Acc)どおりの駆動力を駆動装置11で発生させても駆動装置11が動作禁止領域で動作しないときには、駆動力要求(Acc)どおりの駆動力を駆動装置11で発生させる。制御装置は、駆動力要求(Acc)どおりの駆動力を駆動装置で発生させると駆動装置が動作禁止領域で動作するときには、駆動力要求(Acc)に応じて制動装置88を作動させる。
(もっと読む)
無段変速機
【課題】3軸構造の無段変速機において、前進時及び後進時に十分な駆動力を発生する。
【解決手段】本発明は、3軸構造の無段変速機において、前後進切替機構(3)がサンギア(13)、第1のピニオンギア(23)、第2のピニオンギア(24)及びリングギア(15)を備え、さらに車両の前進時にリングギア(15)の回転を係止するフォワードブレーキ(29)と、車両の後進時にキャリア(14)の回転を係止するリバースブレーキ(31)と、車両の前進時にキャリア(14)と出力側とを連結するフォワードクラッチ(26)と、車両の後進時にリングギア(15)と出力側とを連結するリバースクラッチ(28)とを備える。
(もっと読む)
自動変速機の制御装置
【課題】登坂路走行、降坂走行、牽引走行などの走行抵抗が大きく変化しても最適な全開アップ変速が得られるように変速点の学習を行う、車両用自動変速機の変速制御装置を提供する。
【解決手段】基準エンジン回転加速度算出手段74により基準エンジン回転加速度A2が算出され、推定最大エンジン回転速度推定手段72により前記基準エンジン回転加速度A2と変速出力時点におけるエンジン回転加速度A1との関係に基づいて推定最大エンジン回転速度NEcが推定され、学習補正値算出手段80により、前記推定エンジン回転速度NEcと、変速出力時点における目標最大エンジン回転速度NEdとの差分ΔNEとに基づいた学習により、変速点の補正が行われるため、加速度が通常状態よりも異なる場合、すなわち、牽引(トーイング)時や登坂路走行時においても、加速度の大きさに関わらずその変速の際に学習および変速点の補正を行うことができる。
(もっと読む)
車両用自動変速機の制御装置
【課題】変速制御手段(定速走行制御手段)130による制御の終了と登降坂変速制御手段134による制御の開始が同時になされるべき状況において、自動変速機16の高速段への移行を禁止し、両手段による制御を連続的に行うことができる車両用自動変速機の制御装置を提供する。
【解決手段】路面の勾配に関する値を車両走行状態の値を用いて算出する勾配値算出手段140と、ブレーキ操作の有無を判定するブレーキ操作判定手段144と、変速制御手段130による変速制御中であってブレーキ操作が判定されるとブレーキ操作判定直前の路面勾配に関する値を登降坂変速制御手段134に出力し、登降坂変速制御を実行する登降坂変速実行手段136とを設ける。
(もっと読む)
自動車の走行抵抗を検出する方法
【課題】
走行抵抗F-fw の変更が変更中に早期に検出できて、変速の場合によっては必要な修正を適宜に実施できる走行抵抗F-fw を検出する方法を提供すること。
【解決手段】
この発明は、自動車が自動変速機の変速部と接続していて負荷ギアから目標ギアへ変速され、第一走行抵抗値F-fw-1が変速の開始前に検出され、第二走行抵抗値F-fw-2が遅延時点に検出されて走行抵抗値の大きな変更ΔF-fw =F-fw-2−F-fw-1の際に変速の修正を行う自動車の走行抵抗を検出する方法に関する。
変速中に走行抵抗値F-fw の変更を早期に検出するために、第二走行抵抗値F-fw-2が変速中に検出され、変速の無牽引力位相を維持する時間間隔Δtにわたり自動車の現実加速aの複数の不連続値aiが把握され、この加速値aiから牽引変速の際に加速最小値a-minが決定され、推力変速の際に加速最高値a-maxが決定され、加速( a-min或いは
a-max )と車両質量の極値により第二走行抵抗値(変速中の走行抵抗)F-fw-2が
式F-fw-2=−m*a-min或いはF-fw-2=−m*a-maxにより算出されることが企図されている。 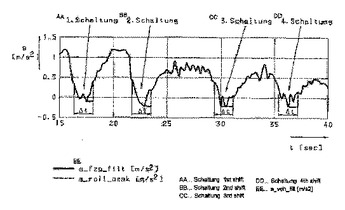 (もっと読む)
(もっと読む)
車両の制御装置
【課題】走行ノイズが周囲に与える影響が大きいタイミングで走行ノイズを抑制する。
【解決手段】目標変速比を設定するステップ(S100)と、騒音レベルNを検知するとともに、騒音レベルNを表示するステップ(S102)と、現在時刻Tおよび現在位置Pを検知するステップ(S108)と、現在時刻Tが深夜帯に含まれ(S110にてYES)、現在位置Pが人口密集地であり(S112にてYES)、騒音レベルNが許容値より大きいと(S114にてYES)、走行ノイズが周囲に与える影響が大きいことを運転者に知らせる警報を発生するステップ(S116)と、アクセルペダルの操作反力を大きくするステップ(S122)と、目標変速比を小さくするように変更するステップ(S128)とを含むプログラムを実行する。
(もっと読む)
車両制御方法
【課題】従来の手法の抱える不都合を回避しつつ急停車後の再発進性を良化する。
【解決手段】エンジンが出力する駆動力をトルクコンバータを介してCVTに入力し駆動輪に伝達するようにしたものにおいて、前進レンジ若しくは後進レンジでの停車時に、CVTの変速比が所定閾値以下となっているかまたはその直前の走行状態から停車に至る過程での減速度が所定閾値以上であったことを判定し、前記変速比が所定閾値以下または前記減速度が所定閾値以上であると判定した場合にエンジン出力を増大させてクリープ力を補償する制御を行う。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】電動機の出力が制限された場合であっても、必要な駆動力を確保して運転フィーリングの低下を防止することができるようにしたハイブリッド電気自動車の制御装置を提供する。
【解決手段】エンジン2の駆動力と電動機6の駆動力とが複数の前進変速段を有する自動変速機8を介して車両の駆動輪16に伝達可能であって、出力可能な最大トルクとして予め定められた上限トルクを電動機6が出力困難となる所定状態が検出されたときには、上記所定状態が検出されないときに使用する変速マップと比較して、車両の運転状態の変化に応じたダウンシフトが早めに行われると共に、車両の運転状態の変化に応じたアップシフトが遅めに行われる制御マップを用いて自動変速機8を制御する。
(もっと読む)
動力伝達装置の制御装置
【課題】複数の動力伝達経路が並列に設けられ、かつ、動力伝達経路毎にクラッチが設けられている車両が登坂路にある場合に、駆動力不足となることを抑制することの可能な動力伝達装置の制御装置を提供する。
【解決手段】車両の原動機と車輪との間に設けられた入力回転部材及び出力回転部材と、入力回転部材と出力回転部材との間に並列に配置された複数の動力伝達経路と、複数の動力伝達経路毎に設けられ、かつ、原動機と車輪との間で伝達されるトルクを制御する複数のクラッチとを有する動力伝達経路を選択する動力伝達装置の制御装置において、登坂路が検知された場合に原動機のトルクを上昇させる原動機制御手段(ステップS1ないしS3)と、登坂路が検知されて原動機のトルクを上昇させる場合に、複数のクラッチの伝達トルクを共に上昇させるクラッチ制御手段(ステップS1ないしS3)とを備えている。
(もっと読む)
車両用自動変速機の変速制御装置
【課題】自動変速モードと変速を制限するための高車速側の変速比が手動操作により切り換えられる手動変速モードとを選択可能な車両用自動変速機において、手動変速モードが選択されているときに運転者の加速意図が適切に反映される変速制御装置を提供する。
【解決手段】マニュアルダウンシフトが実行されたときから所定時間T以内で且つ加速要求量が所定量よりも大きい場合に、自動変速モードが選択されているときに比べてダウンシフトされやすいように変更手段112により変速線図が変更されるので、運転者が車両を加速させるために駆動力Fを増大させることを意図している可能性があると考えられるマニュアルダウンシフト後の所定時間T内は、自動変速モード時に比較してダウンシフトにより加速要求量が所定量とされた運転者の加速意図に応じた駆動力が充足されやすく、その加速意図が適切に反映される。
(もっと読む)
急勾配な上り坂の走行状態における車両の走行中のギアの選択方法
【課題】ギアを選択することによって、急勾配な上り坂の走行状態の状況をより最適にすること。
【解決手段】エンジン(1)のエンジン制御および伝達装置(9)のギアシフトのための命令出力信号を出すことをプログラムされた論理規則によって信号を処理するために、少なくとも1つの制御ユニット(45)と、を備え、急勾配な上り坂の走行状態を検出したときに、目標ギアが上り坂の走行状態に対して決定され、目標ギアは、車両において利用可能な最も低いギア比を有する利用可能な最も高いギアとなっており、少なくとも現在の状況を考慮して、少なくとも論理的に一定の車両速度を保つか、または少なくとも僅かに加速することが可能であり、およびシフトダウンの選択が行われるときに、目標ギアよりも低いギアが選択されない、および係合されないようにする。
(もっと読む)
車両用駆動力制御装置
【課題】車両が特定の走行環境に適した走行状態となるようにするために変速段又は変速比を低速側に変速制御する場合に、ドライバビリティがより向上することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両(300)が特定の走行環境に適した走行状態となるようにするために前記車両の変速段又は変速比を低速側に変速する車両用駆動力制御装置であって、第1の前記特定の走行環境(301)と、前記第1の特定の走行環境よりも前記車両の走行路上先に存在する第2の前記特定の走行環境(303)の間の距離(L1)又は前記距離を前記車両が走行するために必要と推定される時間を検出する手段を備え、前記距離又は前記時間に基づいて、前記第1の特定の走行環境と前記第2の特定の走行環境の間における前記変速段又は変速比を制御する。
(もっと読む)
車両用駆動力制御装置
【課題】運転者による駆動力(減速度を含む)の要求意思に対して正確かつ迅速に応えることの可能な車両用駆動力制御装置を提供する。
【解決手段】路面勾配に基づいて走行に適した減速状態となるように減速度を発生させる減速度発生手段と、変速機の変速操作を行うための運転者により操作される操作手段と、前記運転者との位置関係が予め設定された所定の関係であるか否かを検出する位置検出手段(S103)とを備え、前記運転者の操作によりブレーキ接点がオンとされていない状態で前記操作手段と前記運転者との位置関係が前記所定の関係であると検出された場合には、前記減速度発生手段により減速度を発生させる(S106)。
(もっと読む)
自動変速機の変速制御装置
【課題】 Dレンジ走行中に運転者の手動操作によりアップシフトが指示されたときに、スムーズにアップシフトを行うことが可能な自動変速機の変速制御装置を提供することである。
【解決手段】 設定すべき変速段若しくは変速比を走行状態に基づいて判断して変速動作を行う自動変速モードと、運転者の手動操作によって指示された変速動作を行う手動変速モードとを備えた自動変速機の変速制御装置であって、現在の走行状態が、前記自動変速モードにおける現在の変速段若しくは変速比でダウンシフトが行われる走行状態の第1領域にあるか又は該第1領域より高速車速側の第2領域にあるかを判断する領域判断手段と、前記手動変速モードにおいて運転者の手動操作によってアップシフトが指示されたときに、前記領域判断手段により前記第2領域にいると判断された場合には、当該アップシフトを許可するアップシフト許可手段とを有している。
(もっと読む)
作業車両
【課題】従来の作業運搬車では、水分によりスリップすることがなく、耐久性にも優れ、エンジンブレーキも有効に働く上で、エンジンから車軸への動力伝達を途切れさせることなく滑らかに変速することは困難であった。
【解決手段】有段式変速装置19を備え、該有段式変速装置19は、奇数速度段の変速駆動列である前進1速と3速のギア列への動力断接用の第一クラッチ58と、偶数速度段の変速駆動列である前進2速と4速のギア列への動力断接用の第二クラッチ59とを備えており、奇数速度段と偶数速度段それぞれの変速駆動列が選択された状態で該第一クラッチ58及び第二クラッチ59のうち、一方の離間作動と他方の接合作動とを時間的にオーバーラップさせる。
(もっと読む)
無段変速機の変速制御装置
【課題】キックダウン加速時等の再加速時において、平坦路、登坂路のいずれにおいても良好な加速を実現し、必要以上にエンジン回転数が上昇して燃費が低下することを防止できる無段変速機の変速制御装置を提供する。
【解決手段】本発明による無段変速機の変速制御装置は、特にキックダウン加速時等の再加速時におけるアップシフト変速に際し、アップシフト変速特性としてアクセル開度毎に車速と変速比または目標入力軸回転速度を対応付けた変速線を設定したマップを、同じアクセル開度に対しても変速線に基づくアップシフト量が異なるようになるものを複数有し、車両の運転状況(例えば平坦路走行中か登坂路走行中か)に応じてこれら複数のマップから一つを選択し、選択したマップからアップシフト量を求めることとする。
(もっと読む)
車両の変速制御装置
【課題】 自車位置から勾配切り替わり地点までの間の道路勾配が上り勾配である場合に、自動変速機構による減速動作が運転者に違和感を与えないように適切に変速制御する。
【解決手段】 道路情報を取得する道路情報取得手段8と、勾配切り替わり地点の情報を取得した際に当該地点での推奨車速を決定する推奨車速決定手段17と、勾配切り替わり地点での推奨車速及び所定の減速量に基づいて、勾配切り替わり地点までの間の各地点での車速を地点推奨車速として演算する地点推奨車速演算手段29と、地点推奨車速よりも高い車速であって、勾配切り替わり地点までの距離が長いほど地点推奨車速との差が大きい制御判定車速を演算する制御判定車速演算手段30と、勾配切り替わり地点までの道路の勾配が上り勾配であって、各地点での実車速が当該各地点での前記制御判定車速以下である場合には、自動変速機構3の減速動作を制限する減速制限手段31と、を備える。
(もっと読む)
41 - 60 / 65
[ Back to top ]