
Fターム[3J552PA59]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 目的(一般) (9,045) | 省エネルギー(例;燃費) (1,032)
Fターム[3J552PA59]に分類される特許
1,021 - 1,032 / 1,032
自動変速機搭載車両
【課題】自動変速機搭載車両において、トルクコンバータにおける損失を抑えて燃費を向上させる。
【解決手段】 トルクコンバータ22の運転状態を監視し、トルクコンバータ22の損失が大きい場合には、トルクコンバータ22における損失を低減する所定の運転操作(アクセル戻し操作、ロックアップクラッチ21の締結操作等)を行うよう運転者に指示が出される、あるいはトルクコンバータ22における損失を低減する所定の車両制御(エンジン出力減少、変速制御、ロックアップクラッチ21の締結)が自動的に行われるので、トルクコンバータ22における損失を抑え、燃費を向上させることができる。
(もっと読む)
車両用駆動装置の制御装置

【課題】 電気的な無段変速機として作動可能な変速機構における変速制御を好適に行う制御装置を提供する。
【解決手段】 電気的な無段変速機として作動可能な無段変速状態と定変速比状態とに切り換え可能な差動部11と、予め定められた関係から車速及び車両負荷乃至車両用駆動装置の出力トルクに基づいて差動部11を無段変速状態及び定変速比状態のうち何れかに選択的に切り換える切換制御手段60とを、含むことから、差動部11を含む電気的な無段変速機として作動可能な変速機構10における変速制御を好適に行う制御装置を提供することができる。
(もっと読む)
変速機の制御装置
【課題】 フィードバック制御する実油圧に油圧振動が生じる場合においても、実油圧の平均値を目標油圧の下限値に一致させて、動力伝達効率を向上することができる変速機の制御装置を提供する。
【解決手段】 目標値と実際値との偏差に基づいて、積分動作を含むフィードバック制御によって調圧される油圧により動作状態が設定される変速機の制御装置において、前記実際値の油圧振動における振幅を検出する油圧振動検出手段(ステップS203)と、前記実際値が前記目標値の下限値に到達した場合に、前記振幅検出手段により検出した前記振幅に基づいて前記積分動作における積分項の積算を変更する積分動作変更手段(ステップS106,S107)とを備えている。
(もっと読む)
車両の制御装置
【課題】 乗員のシフト操作に応じて変速するマニュアル変速モードが備えられた車両において、停車中、車両の後退防止のために、自動変速機の変速段を車両の後退を阻止可能な所定変速段に制御すると共に、アクセルが踏み込まれて発進する際に当該所定変速段から最低速段に制御するようにした場合に、乗員が車両の停車時にマニュアル変速モードを選択し、かつ所定変速段を選択しているときに、乗員の意図に反して自動的に発進時に変速段が最低速段に制御されるのを防止し、もって乗員の違和感を防止する。
【解決手段】 制御回路は、停車中は変速段を2速に制御すると共に、当該所定変速段への制御状態においてアクセルが踏み込まれたときは変速段を1速に制御する一方、停車中にマニュアル変速モードで乗員のシフト操作に応じて変速段を上記2速に制御している場合は、上記アクセルが踏み込まれたときの1速への制御を禁止する。
(もっと読む)
動力伝達装置
【課題】 オイルポンプから吐出されるオイルを利用して、車輪に伝達されるトルクを増加することの可能な動力伝達装置を提供する。
【解決手段】 動力伝達可能に連結された第1の回転部材6,8および第2の回転部材2,9を有し、第1の回転部材6,8と第2の回転部材2,9との相対回転により、第1の油路18からオイルを吸引し、かつ、吸引したオイルを第2の油路19に吐出する構成を有するオイルポンプ7が設けられているとともに、駆動力源1と車輪5との間で、第1の回転部材6,8および第2の回転部材2,9を経由して動力伝達がおこなわれるように構成されている動力伝達装置において、オイルポンプ7から吐出されるオイルの機械的エネルギを、車輪76に伝達する機械的エネルギに変換する変換装置27が設けられている。
(もっと読む)
車両用駆動装置の制御装置
【課題】 減速走行中において第1要素の回転を抑制したり或いはエンジンブレーキ力を大きくするが、その第1要素の軸受の耐久性に悪影響を与えない状態ではエンジン回転速度の回転を抑制できる車両用駆動装置の制御装置を提供する。
【解決手段】 切換制御手段50は、車両の減速走行時において動力分配機構(差動歯車装置)16の出力軸回転速度NINが所定値A以上となるときは切換クラッチC0により動力分配機構16をロック状態とし、動力分配機構16の出力軸回転速度NINが所定値Aを下まわるときは切換クラッチC0により差動歯車装置16が差動状態とする。これにより、サンギヤS1等を支持する軸受の耐久性の低下が抑制されるとともに、エンジン8の引きずりによる回転損失の発生が抑制されて効率の高い回生が得られ、燃費が改善される。
(もっと読む)
オートマチックトランスミッションの制御方法
本発明はオートマチックトランスミッションの変速比がそのつどの走行作動状況に依存して自動的にオートマチックモードに設定されるか若しくは前記オートマチックトランスミッションの変速比がドライバーによって手動でマニュアルモードに設定され、前記オートマチックトランスミッションの変速機制御装置は、予め定められた少なくとも1つの復帰基準が満たされた場合に、マニュアルモードからオートマチックモードへ自律的に切り換えるオートマチックトランスミッションの制御方法に関している。ここではシフトダウン過程の手動での開始後並びにシフトダウンの実施がなされた後で、正の車両長手方向加速度が終了し、この車両長手方向加速度が予め定められた期間よりも長く継続している場合に、オートマチックトランスミッションの作動モードがマニュアルモードからオートマチックモードへ切り替わる。 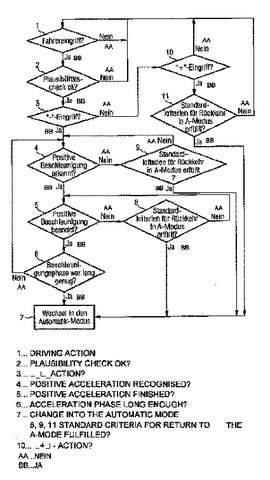 (もっと読む)
(もっと読む)
荷役作業用産業車両の荷役装置
【課題】 所謂ハイブリッド型の荷役作業用産業車両において、燃費を向上させ、発電電動機の過負荷を防止する。
【解決手段】 エンジン111と、発電電動機113と、両者の間で動力を断接するクラッチ112と、バッテリー115と、フォーク118を駆動するための荷役ポンプ117と、を有する。発電電動機113は発電機モードと電動機モードのいずれかとされる。荷役負荷(荷役レバーポジションセンサ145等により検出)が小さいと、クラッチ112を切って、エンジン111を停止又はアイドリングさせるとともに、電動機モードの発電電動機113で荷役ポンプ117を駆動する。クラッチ112を切った状態での荷役作業中に負荷が所定以上に増大すると、発電電動機113の出力を増大させつつエンジン回転数の増大を開始し、発電電動機113の回転数にエンジン回転数が追従するとクラッチ112を繋ぎ、エンジン111により荷役ポンプを駆動させる。
(もっと読む)
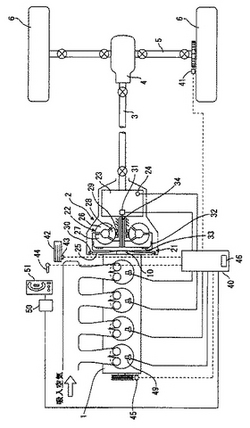
自動車の自動フリーホイーリングの方法およびシステム
速度低下手段と、1個のエンジン(1)と、前記エンジン(1)により自動段歯車変速機(9)を介して駆動される少なくとも1個の車輪と、前記エンジン(1)の駆動トルクを調整するガスペダル(48)と、制御装置(45)が配設された自動車の自動フリーホイーリング方法に関する。前記制御装置(45)が、フリーホイール機能が作動せしめられ、かつ所定の自動車速度制限(vmax)を上回っていることを示す入力信号が存在する場合に、フリーホイール機能を自動的に作動解除するとともに、速度低下手段を用いて自動車を制動するように構成される。また前記制御装置(45)は、自動車速度(v)が所定の自動車速度制限(vmax)に近づくまで低下したことを示す入力信号が存在する場合に、フリーホイール機能を再作動させるように構成される。実施形態によると、自動車の未来進行は、燃料の消費量の削減および/または快適性の向上に間して最適化する目的でシミュレーションされる。 (もっと読む)
変速機及び定速補機駆動装置
回転速度比無限可変プラネタリボール変速機は、可動インナ(23)及びアウタレース(26)と転がり接触するプラネタリメンバ(15)と、変速機を用いる定速補機駆動システムとを備える。変速機は約0.3及び1.0の比の間で無限に可変である。変速機入力シャフト(11)は、ドライブベルト(B1)により車両のエンジンクランクシャフトのような原動機に接続される。変速機は、入力シャフト(11)と同軸である、少なくとも1つの出力シャフト(22)を備える。プロセサは、クランクシャフトの速度を分析し、それにより、クランクシャフト速度に関係なく一定の出力速度を維持するためにウォームドライブ(90)と接続されたステッパモータ(96)を用いて変速比を調節する。 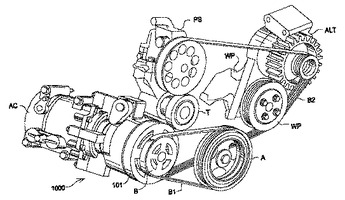 (もっと読む)
(もっと読む)
無段変速機
一次プーリ(2)と二次プーリ(3)とを備え、その周囲に駆動ベルト(10)を配置し、駆動ベルト(10)は、一次クランプ力を持つ一次プーリ(2)の2個の円錐形プーリディスクの間と、二次クランプ力を持つ二次プーリ(3)の2個の円錐形プーリディスクの間でクランプされ、各プーリ(2;3)のプーリディスクの少なくとも一方と駆動ベルト(10)の接触角度を適合する結果、少なくとも変速機(1)の最大速度伝達比、すなわちローにおいて、一次クランプ力と二次クランプ力との間のクランプ力比は、1と最小速度伝達比、すなわちオーバドライブのクランプ力比との間の範囲の値を有することを特徴とする車両用無段変速機(1)である。 (もっと読む)
無段変速機の油圧制御装置
【課題】 高速側への変速を確保しながら、燃費性能も向上させる。
【解決手段】 ライン圧を直接セカンダリプーリへ、変速制御弁を経てプライマリプーリへ供給して変速制御する。ステップ102で目標の変速比に対応したステップモータのステップ位置を算出し、必要な駆動ステップ数指令すると、ステップ104でステップモータが移動して連結した変速制御弁が作動し、プライマリプーリへの油圧を制御する。ステップ105で各プーリの回転数から実変速比を算出し、これを次ステップで目標変速比と比較して変速達成をチェックする。変速未達のときは、次の2ステップで付加回数nを確認しながら、ステップ109で1ステップずつ付加的にステップモータ駆動を繰り返す。nがしきい値に達しても変速未達のときライン圧を上昇させて変速を実現する。通常は低い油圧でベルト、プーリの摩擦損失を低減できる。
(もっと読む)
1,021 - 1,032 / 1,032
[ Back to top ]