
Fターム[3J552VE06]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 外部からの情報 (777) | 外部情報検知手段 (220)
Fターム[3J552VE06]の下位に属するFターム
通信情報(ビーコン,FM電波等) (19)
カーナビGPS情報 (137)
画像情報 (21)
他のCPUからの情報 (11)
Fターム[3J552VE06]に分類される特許
1 - 20 / 32
運転支援装置
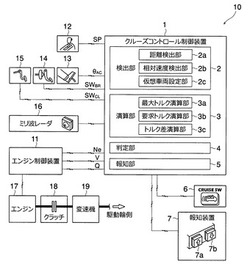
【課題】運転支援装置に関し、周囲の走行環境の変化に応じた協調的な安定走行を実現する。
【解決手段】変速機19を搭載した車両の運転支援装置において、変速比に応じた駆動輪の最大トルクと、走行状態に応じて駆動輪に要求される要求トルクとを演算する演算手段3を設ける。
また、車両の周囲の他車両の走行状況を検出する検出手段2を設ける。
さらに、演算手段3で演算された最大トルク及び要求トルクと、検出手段2で検出された走行状況とに基づき、変速比の変更の要否を判定する判定手段4を設ける。
(もっと読む)
車両運動制御装置及びプログラム

【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
走行支援装置、方法およびプログラム
【課題】走行安定性を低下させることなく目標位置において目標車速以下となるように走行支援を行うこと。
【解決手段】車両の前方に存在する目標位置および当該目標位置における目標車速を示す情報を取得し、前記車両の前方に存在する路面の摩擦度合が所定の基準より小さい低摩擦区間の長さを示す情報を取得し、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在する場合、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在しない場合に前記目標位置において車速を前記目標車速以下にさせる走行支援を行う際の走行支援開始位置よりも、前記低摩擦区間の長さだけ車両側の位置から前記走行支援を開始するとともに、前記低摩擦区間においては前記走行支援を中断する。
(もっと読む)
運転支援装置
【課題】この発明は、車両の接触や位置ずれを回避し易くする車両状態を設定でき、車両が容易に動き出すことがないように保持でき、不注意や誤操作による車両の接触を回避できる運転支援装置を実現することを目的とする。
【解決手段】この発明は、運転支援装置において、物体検知手段からの出力により車両の接触有無を判断する機能と、通信手段からの車両位置情報により目標位置ずれ有無を判断する機能とを有し、これらの機能から車両の接触有判断と目標位置ずれ有判断とのうち1つ以上の判断が成立した場合に、シフト制御装置にニュートラルレンジ要求するよう制御する一方、シフト制御装置はこの要求により変速機がニュートラルレンジを実現するよう切換制御することを特徴とする。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】自動で減速を行うための制御を実施している過程にて当該自動制御を中止した場合であっても安定した走行を行わせること。
【解決手段】自車両の制御状態が自動制御に設定されている場合に、前記自車両の減速量を制御して前記自車両の車速を所定の目標車速まで減速させ、前記減速量を所定の基準に対応した変化量で変化させて前記自動制御から前記手動制御へ移行させる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】運転者の意図を尊重しつつ、確実に目標車速まで減速する技術を提供する。
【解決手段】自車両の前方の所定位置における目標車速を取得し、前記目標車速まで減速させる際の、減速度が異なる複数の減速動作パターンを取得し、前記自車両の車速を制御するための運転操作に基づいて、前記複数の減速動作パターンの中から減速動作パターンを選択し、前記選択された減速動作パターンを基準にして前記所定位置に到達する以前に前記自車両の車速を前記目標車速まで減速させる。
(もっと読む)
ナビゲーション装置、道路勾配演算方法および高度演算方法
【課題】ブレーキ操作中にも道路勾配演算の継続を可能にし、かつ、演算される自車位置の高度の精度を向上させる。
【解決手段】 平坦路加速度演算部1はエンジン出力トルクと車両重量とに基づいて平坦路加速度を演算し、推定加速度演算部2は車速に基づいて推定加速度を演算し、道路勾配演算部3は平坦路加速度および前記推定加速度に基づいて道路勾配を演算し、高度演算部6は道路勾配を用いて高度を演算する。このとき、道路勾配演算部3は、ブレーキSWがONになったときには、それ以降ブレーキSWがOFFになるまで、自車が走行する道路の勾配を、ブレーキSWがONになる直前に演算した道路勾配またはその道路勾配の変化率に基づいて予測演算する。また、車両重量学習部7は、推定加速度の微分値と自車の駆動力微分値とに基づき現在の車両重量を演算するともに、過去の車両重量を用いて、適宜その車両重量を補正する。
(もっと読む)
シフトダウン制御装置
【課題】補助ブレーキに伴うシフトダウンを交通状況に応じて制御可能なシフトダウン制御装置を提案する。
【解決手段】補助ブレーキ3の作動に伴うシフトダウンを実行可能な自動変速機5を備えた車両のシフトダウン制御装置として、補助ブレーキ3が作動するときに、レーダ8により検知される車間距離をしきい値と比較する車間距離判断手段、そして、車間距離がしきい値以下であった場合に自動変速機5のシフトダウンを許可し、車間距離がしきい値を越えている場合は自動変速機5のシフトダウンを抑止する変速実行判断手段、として動作するシフトダウン制御装置6を提案する。
(もっと読む)
車両用駆動力制御装置
【課題】運転者の減速意図に基づいて減速制御を行い、運転者の加速意図に基づいて減速制御から復帰する車両用駆動力制御装置において、運転者の感覚に合ったタイミングで走行環境パラメータに基づく減速制御から復帰する。
【解決手段】車両の走行環境(S1)及び運転者の減速意図(S2)に基づいて減速制御(S3)を行うとともに、運転者の加速意図(S4)に基づいて予め設定された復帰時間の経過後(S8、S9)に前記減速制御から復帰(S10)する車両用駆動力制御装置であって、前記運転者の加速意図が検出された際の車両の走行環境(S5、S6)に基づいて、前記復帰時間が可変に設定される(S7)。前記運転者の加速意図が検出された際の車両の走行環境に基づいて、前記運転者の加速意図が検出された後に運転者の減速意図が検出される可能性が高いと判定された場合(S5−Y、S6−Y)には、前記復帰時間が大きな値に設定される(S7)。
(もっと読む)
車両用制駆動力制御装置および車両用制駆動力制御方法
【課題】エンジンブレーキ作動中に、ドライバがアクセルペダルを踏んだ時の駆動力段差を低減する。
【解決手段】車速および車両の横旋回度合に基づいて、車両の減速度を求めて、求めた減速度を実現するために必要なエンジンブレーキトルクを算出する。算出したエンジンブレーキトルクの絶対値がエンジンブレーキトルク上限値より小さくなるように制御するとともに、車両の横旋回度合が大きいほど、エンジンブレーキトルク上限値を小さくする。
(もっと読む)
運転指向推定装置
【課題】車両の走行環境によって発生する運転者の意図と運転指向の推定値との乖離を改善することが可能な運転指向推定装置を提供する。
【解決手段】車両走行状態に関連する情報に基づいて人工知能システムを用いて運転指向を推定する運転指向推定装置であって、運転者の指向とは無関係に発生する車両挙動が発生したときには(ステップS002−Y)、前記車両走行状態に関連する情報の変化率を小さくする第1制御(S005)、及び前記人工知能システムから出力された運転指向を示す情報の変化率を小さくする第2制御の少なくともいずれか一方を実行する。
(もっと読む)
車両用駆動力制御装置
【課題】検出対象の位置検出精度の問題で良好な駆動力制御が妨げられることを抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の先方の環境を検出し、前記環境に適した駆動力制御を行う車両用駆動力制御装置であって、道路上又は道路周辺の印の情報を予め記憶する記憶手段と、前記印を検出する手段と、前記検出された印に基づいて車両と前記環境との距離情報を求める手段(S40)と、前記距離情報に基づいて、駆動力制御を行う(S70)。
(もっと読む)
運転指向推定装置
【課題】ニューラルネットワークのような人工知能システムを用いた情報処理機構により運転指向が推定される場合に、車両の重量によらず、より高精度に運転指向を推定することの可能な運転指向推定装置を提供する。
【解決手段】運転指向を推定する運転指向推定装置であって、車両の重量に応じて設定値を可変の値として設定する設定手段(S2)と、前記設定値を用いて、運転指向を推定する推定手段(S3)とを備えている。前記推定手段は、ニューラルネットワークを備え、前記設定値は、前記ニューラルネットワークの結合係数であることができる。
(もっと読む)
車両の制御装置
【課題】走行ノイズが周囲に与える影響が大きいタイミングで走行ノイズを抑制する。
【解決手段】目標変速比を設定するステップ(S100)と、騒音レベルNを検知するとともに、騒音レベルNを表示するステップ(S102)と、現在時刻Tおよび現在位置Pを検知するステップ(S108)と、現在時刻Tが深夜帯に含まれ(S110にてYES)、現在位置Pが人口密集地であり(S112にてYES)、騒音レベルNが許容値より大きいと(S114にてYES)、走行ノイズが周囲に与える影響が大きいことを運転者に知らせる警報を発生するステップ(S116)と、アクセルペダルの操作反力を大きくするステップ(S122)と、目標変速比を小さくするように変更するステップ(S128)とを含むプログラムを実行する。
(もっと読む)
自動車の走行制御装置
【課題】
先行車の追従走行時において、ドライバーに違和感のない加減速を実現する自動車の走行制御装置を提供することを目的とする。
【解決手段】
先行車を追従走行しているときに、先行車のカーブ進入速度と先行車までの距離を記憶部16に記憶しておき、自車がその地点に到達したときに記憶した先行車の速度以下となるように、例えばスロットル24,変速機26,ブレーキアクチュエータ27の少なくとも1つを用いて自車速度を制御する自車速度の制御を行う。
(もっと読む)
車両制御装置及び方法
【課題】自車両の減速後の予想走行状態等に応じて適切に減速手段を決定することにより、運転者に違和感を与えることなく自車両を減速させる制御を行うことが可能な車両制御装置及び方法を提供する。
【解決手段】道路情報及び現在車速に基づいて、自車両が減速する必要がある場合に、減速目標点及び目標車速を決定し、現在車速及び目標車速と、減速目標点までの距離とに基づいて、エンジンブレーキにより適切な減速を行うための変速機構の変速比を決定し、決定された変速比で目標車速まで減速したときの自車両の走行状態量が、エンジンブレーキが作用する走行状態量の下限値を基準として定めた所定の状態閾値以上である場合に、エンジンブレーキを用いた減速制御を行うことを決定する。
(もっと読む)
変速機の制御装置
【課題】アクセル開度に基づいて変速機の予め設定された変速やロックアップクラッチのオンオフ動作のような特定動作の制御を行う変速機の制御装置において、特定動作が行われる頻度を低減することにより運転者の違和感を抑制することが可能な変速機の制御装置を提供することである。
【解決手段】アクセル開度に基づいて変速機の予め設定された特定動作の制御を行う変速機の制御装置であって、車両前方の道路の情報を検出又は推定する道路情報検出推定手段と、前記車両前方の道路の情報に基づいて、前記車両が前記車両前方の道路を通過する際に必要となる駆動力の変化量を推定する手段と、前記駆動力の変化量が予め設定された所定値以下である場合(S60−Y)には、前記駆動力の変化量が前記所定値を超えた場合(ステップS60−N)に比べて前記特定動作を実行し難くする制御手段(ステップS70)とを備えている。
(もっと読む)
車両用制御装置
【課題】道路交通状況に応じて適切に加速操作支援を行う車両用制御装置を提供すること。
【解決手段】車両において、運転者による加速操作を支援する車両用制御装置が、自車両の現在位置を検出する位置検出手段と、位置検出手段によって検出された自車両現在位置を地図情報に照らして自車両が自車両進行方向において後に主たる道路に合流する従たる道路上に位置するか否かを判定する判定手段と、判定手段によって自車両が従たる道路上に位置すると判定されたとき、主たる道路上の交通状況に関する情報を取得する取得手段と、取得手段によって取得された情報から主たる道路上に渋滞が発生していないと判断されたとき、自車両運転者による加速操作を支援する加速支援手段とを備える。
(もっと読む)
車両の制御装置
【課題】他車両の周囲の障害物の有無に基づいて、自車両の挙動を制御することの可能な車両の制御装置を提供すること。
【解決手段】外部情報検出装置により他車両の自動変速機のシフト情報を検出するシフト情報検出手段(ステップS11,S12)と、他車両の自動変速機のマニュアルダウンシフトが検出された場合に、自車両の自動変速機の変速段を他車両の自動変速機の変速段と同一の変速段までダウンシフトすれば所定の車間距離を維持できるか否かを判断し、肯定された場合には、自車両の自動変速機の変速段を他車両の自動変速機の変速段と同一の変速段にダウンシフトし、否定判断された場合には、自車両の自動変速機の変速段を他車両の自動変速機の変速段よりも1段高い変速段にダウンシフトするとともに、他車両の減速を自車両の運転者に警告する挙動制御手段(ステップS13〜S15)とを備えている。
(もっと読む)
追従走行制御装置および追従走行制御方法
【課題】 ドライバーの意図に応じた適切な追従走行制御を可能とする追従走行制御装置および追従走行制御方法の提供。
【解決手段】 先行車両との車間距離や先行車両との相対速度等に基づいて自車両の目標加減速度を設定する追従走行制御装置では、先行車両の制動灯が点灯したと判断されると(S200のYes)、自車両のドライバーの視点が検出され(S202)、ドライバーが先行車両の制動灯を注視しているか否か判定される(S204,S206)。ドライバーが先行車両の制動灯を注視していると判断され(S206のYes)、かつ、ドライバーがブレーキ操作を行ったと判断された場合(S208のYes)、ドライバーの要求制動力に応じて目標制御量の補正量が算出され(S210)、追従走行時用の加減速度マップが適宜更新される(S218)。
(もっと読む)
1 - 20 / 32
[ Back to top ]