
Fターム[3J552VE08]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 外部からの情報 (777) | 外部情報検知手段 (220) | カーナビGPS情報 (137)
Fターム[3J552VE08]に分類される特許
1 - 20 / 137
ハイブリッド車両の制御装置および制御方法
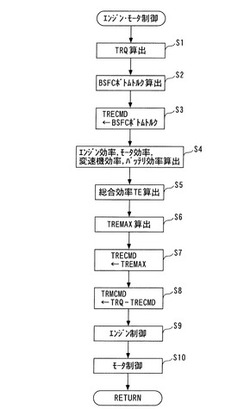
【課題】 内燃機関および電動機が同時に運転されるアシスト走行モードや充電走行モードにおいて、出力すべき駆動力を内燃機関および電動機に適切に配分し、ハイブリッド車両の燃費を向上させることができるハイブリッド車両の制御装置および制御方法を提供する。
【解決手段】 本発明によれば、車速VPおよび変速段から、内燃機関3の目標トルクTRECMDを燃料消費率が最小になるBSFCボトムトルクに設定し(ステップ3)、設定された目標トルクTRECMDを、電動機4の効率に応じて、BSFCボトムトルクから移動し(ステップ6〜7)、移動された目標トルクTRECMDが得られるように、内燃機関3の動作を制御し(ステップ9)、要求トルクTRQとシフトされた目標トルクTRECMDとの差分を、電動機4による力行/回生によって補充/吸収するように、電動機4の動作を制御する(ステップ10)。
(もっと読む)
車両の回生発電制御装置

【課題】アクセルオフ操作によるコースト走行時、車両トータルとしてのエネルギ回収率の改善を図ること。
【解決手段】ハイブリッド車両の回生発電制御装置は、副変速機付き無段変速機CVTと、モータ/ジェネレータMGと、統合コントローラ10と、を備える。副変速機付き無段変速機CVTは、左右タイヤLT,RTに対して動力を伝達する。モータ/ジェネレータMGは、動力伝達経路からの動力により発電を行う。統合コントローラ10は、アクセルオフ操作によるコースト走行時に、ip=1近傍制御を実施することにより、副変速機付き無段変速機CVTへの変速油圧の元圧であるライン圧PLを低下させた上で回生発電制御を行う(図4)。
(もっと読む)
車両の制御装置および制御方法
【課題】変速段の変更の可否を予測した充電量に基づいて適切に判定でき、ひいては、車両の燃費を向上させることができる車両の制御装置および制御方法を提供する。
【解決手段】車両の減速走行中、変速段を保持した状態で車両の停止まで回生を行ったと仮定した場合における充電量である第1充電量CH1が推定され(ステップ1)、車両の停止までに変速段を目標変速段に変更するとともに車両の停止まで回生を行ったと仮定した場合における充電量である第2充電量CH2を推定し(ステップ3)、第1および第2充電量CH1、CH2を用いて変速段を保持すべきかまたは変更すべきかを判定した(ステップ4)結果に基づいて、変速段が設定される(ステップ5、6)。
(もっと読む)
モータ制御装置
【課題】基準位置を設定する壁当て制御の回数を抑制する。
【解決手段】壁当て制御手段23は、マニュアルレバー4をP壁5に押し付けることによってモータ7を制御するための基準位置を設定する。壁当て制御は、初期化条件の成立に応答して実行される。初期化条件は、電源スイッチ31のオン操作、および外部電源33の接続である。禁止手段は、初期化条件が非成立となってから、利用者が車両10から所定の閾値Dthを越えて離れるまで、初期化条件が再び成立しても、壁当て制御を禁止する。この結果、再度の壁当て制御を回避することができる。
(もっと読む)
省燃費運転システム
【課題】 本発明の目的は、上り坂を走行中に上り坂に関する道路勾配情報データベースを構築することが出来て、上り坂を走行する際に省燃費走行を行なう様なアドバイスや車両制御を行なうことが出来る省燃費運転システムを提供するにある。
【解決手段】GPSセンサ(8)によって自車の位置情報を取得し(S3)、エンジン出力が規定値(Pa)以上であるか否かを判断し(S4)、エンジン出力が規定値(Pa)以上であれば加速度が規定値(αa)以上であるか否かを判断し(S5)、エンジン出力が規定値以上ではなく、また加速度が規定値(αa)以下ではないときはシフトダウンに必要な時間(Ta)以内であるか否かを判断し(S6)、シフトダウンに必要な時間(Ta)以内にシフトダウンを行なっているか否かを判断し(S7)、前記加速度が規定値(αa)以上であるか、又は前記シフトダウンを待っていれば上り坂と判定し(S8)、位置情報、勾配情報、シフト位置を記憶装置(11)に記憶させる(S9)。
(もっと読む)
車両の運動制御装置
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
自動変速機制御装置
【課題】省燃費走行となるように自動変速機を制御することができる自動変速機制御装置を提供する。
【解決手段】運転特性算出部42は、車両が所定の道路を走行している際の運転者の運転特性を示す運転特性データ224を生成する。ネットワークデータ送信部46は、運転特性データ224をネットワークデータ・データベース14に送信する。ネットワークデータ受信部44は、燃料消費量が最も少なくなる運転特性を示すネットワークデータ222を受信する。運転特性算出部42は、ネットワークデータ222に基づいて運転特性データを補正して運転特性データ学習値220を生成して変速制御部16に供給する。
(もっと読む)
車両用走行制御装置
【課題】燃費性能を向上させること。
【解決手段】動力源としてのエンジン10と当該エンジン10の動力を駆動輪WL,WRに伝える動力伝達装置とを備えた車両の走行状態を制御する車両用走行制御装置において、自車の所定距離先までの間の走行路の勾配を把握し、その所定距離先でも自車が加速を続ける可能性のあるときに、エンジン10と駆動輪WL,WRとの間の動力伝達が可能な状態のまま当該エンジン10への燃料の供給量を減少させ又は当該燃料の供給を停止させた惰性走行を行い、自車が前記所定距離先を超えるまでに減速し始める可能性のあるときに、エンジン10と駆動輪WL,WRとの間の動力伝達が断たれるように動力伝達装置の動力断接部(ロックアップクラッチ35と入力クラッチC1の内の少なくとも1つ)を制御して前記惰性走行を行うこと。
(もっと読む)
自動車の自動変速機の制御方法
【課題】道路勾配に応じて簡単な操作で運転プログラムが割当てられる、クルーズコントロールを備えた自動車の制御方法を提供する。
【解決手段】クルーズコントロールを備えた自動車の自動変速機の制御方法は、変速機制御がクルーズコントロールのもとで外的影響、特に道路勾配に関連する別個の運転プログラムに切換えるものである。この運転プログラムは外的影響に応じて更新される。状態「設定」で別個の運転プログラムに切換えられ、状態「復帰」で運転プログラムが直ちに又は制御状態「設定」に到達した後に初めて作動されるように、変速機制御を調整することができる。
(もっと読む)
駆動制御装置
【課題】駆動制御装置において、慣性走行中により適切に減速することを可能とする。
【解決手段】駆動制御装置(100)は、車両(1)の動力源(10)で発生した回転動力を車両の駆動輪に伝達する伝達状態、及び、回転動力を駆動輪に伝達せず車両に慣性走行させる非伝達状態のうちいずれか一方からいずれか他方へ切り替え可能な切り替え手段(23等)と、駆動輪の駆動軸の回転速度と動力源の回転速度との比である変速比を変更可能な変速手段(20)と、非伝達状態において駆動軸の回転速度を低下させる場合、切り替え手段によって非伝達状態から伝達状態へ切り替えさせた後、変速比を変更するように変速手段を制御する制御手段(43)とを備える。
(もっと読む)
車両用駆動システム
【課題】ブレーキ減速後の再加速時の応答性を向上させ得る車両用駆動システムを提供すること。
【解決手段】この車両用駆動システム1は、摩擦係合要素の係合および解放を切り換えて変速段を変更する変速機4を備えている。また、車両用駆動システム1は、ブレーキ開放速度に基づいてブレーキ減速後の再加速要求の可能性を推定する再加速要求推定部513と、摩擦係合要素C1、C2、B1、B2の係合あるいは解放にかかる所定の予備動作を制御する予備動作制御部514とを備えている。そして、車両のブレーキ減速時にて、再加速要求推定部513がブレーキ減速後の再加速要求の可能性ありと判定したときに、予備動作制御部514がダウンシフトのための予備動作を所定の変速段にかかる摩擦係合要素に行わせている。
(もっと読む)
車両の走行制御装置
【課題】車両の走行制御装置において、燃費の向上を可能とする。
【解決手段】車両が予め設定された所定の道路勾配区間を走行中であるかを検出する勾配検出部41と、所定の道路勾配区間における車両の走行状態を記憶する走行状態記憶部42と、記憶された道路勾配区間を走行する車両の走行状態に基づいて変速段が適した変速段かどうかを判定する変速段判定部43と、変速段が適した変速段でなかったときにより適した変速段を再設定して記憶する変速段再設定部44とを設ける。
(もっと読む)
パワートレーンの制御装置
【課題】無段変速機の入力軸回転数を制御するために必要な処理を簡素にする。
【解決手段】上限値、下限値および回転数のうちのいずれかを各々が設定する、優先順位付けされた複数の制御システムから、優先順位が高い順に、上限値、下限値および回転数のうちのいずれかが取得される。上限値または下限値が取得されると(S102にてYES)、取得された上限値または下限値が、第1制限値または第2制限値として記憶される(S106)。第1制限値よりも小さく、第2制限値よりも大きい回転数が取得されると(S102にてNO、S110にてYES)、取得された回転数が目標値として設定される(S112)。回転数が取得されると(S102にてNO)、上限値、下限値および回転数を取得することが中断される(S120)。無段変速機は、プライマリプーリ回転数NINが目標値になるように制御される(S122)。
(もっと読む)
変速指示装置
【課題】運転者に煩わしさを感じさせることを低減することができる変速指示装置を提供する。
【解決手段】EFI−ECUは、車両の走行状態を取得し(ステップS11)、燃費を向上するための目標変速段を算出する(ステップS12)。また、EFI−ECU13は、現在の変速段を取得する(ステップS13)。次に、EFI−ECU13は、現在の変速段と目標変速段とが異なっている場合には、変速要求が発生していると判断(ステップS14でYES)する。そして、EFI−ECU13は、AI制御の実行中であり(ステップS15でYES)、ステップS12において算出した目標変速段が、AI制御において禁止されている制限変速段であると判断した場合には(ステップS17でYES)、変速指示を非提示とする。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
車両運転支援装置
【課題】車両の減速時における運転者の違和感を低減する。
【解決手段】車両運転支援装置1は、自動変速機を有する車両の運転を支援する装置であって、自車両のアクセル開度を示す情報であるアクセル開度情報を取得するアクセル開度センサ4と、アクセル開度情報に基づき、アクセル開度が所定の閾値以下であると判断した場合に、アクセル開度が所定の閾値以下であると判断する前よりも、変速比を小さくするように自動変速機を制御する制御ECU6とを備える。この構成によれば、アクセス開度が所定の閾値以下となると、自動変速機の変速比が小さくなるように制御されるので、エンジンブレーキの制動力が低下する。これにより、停止位置に向かって車両が走行しているときの減速量が抑制されるので、速やかに停止位置に到達できると共に、減速制御により運転者に与える違和感が低減される。
(もっと読む)
自動車の推進力能力の決定方法
本発明は、自動車(1)を推進させるために様々な速度伝達比をとるように構成されかつ少なくとも1つのエンジン(10)および少なくとも1つの変速機(20)を備える伝動機構が装備された前記自動車(1)の推進力能力を表す第1のパラメータRFを決定する方法に関する。この第1のパラメータRFは、第1の推進力FMaxと第2の推進力FDrの差に基づいて決定され、第1の推進力FMaxは、現在速度伝達比で自動車(1)のために利用可能な最大推進力であり、第2の推進力FDrは、自動車(1)の現在走行抵抗である。本発明は、また、そのようなパラメータの使用に関し、さらにそのようなパラメータに関連したコンピュータプログラム、コンピュータプログラム製品、システムおよび自動車に関する。 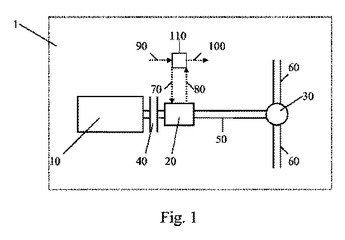 (もっと読む)
(もっと読む)
ハイブリッド車両の制御装置
【課題】 車両の進行方向での道路の勾配情報に応じて、モータによる車両の駆動力のアシストを制御して、車両の円滑な走行を維持する。
【解決手段】 本発明は、ハイブリッド車両の制御装置を提供する。その制御装置は、ナビゲーション装置からの勾配情報により車両の進行方向に緩やかな傾斜があると判断され、かつアクセルペダル変化量検出手段により検出されたアクセルペダルの変化量が所定値未満である場合、車両の速度を一定に維持すべきと判定する速度維持判定手段と、ナビゲーション装置からの勾配情報に基づいて、車両の進行方向での勾配負荷を算出する勾配負荷算出手段と、勾配負荷算出手段からの勾配負荷に応じて、モータによる車両の駆動力のアシストを制御するアシスト制御手段と、を備える。
(もっと読む)
運転支援装置
【課題】ドライバに与える違和感を軽減することができる運転支援装置を提供する。
【解決手段】 運転支援装置1のECU7は、自車両の現在位置と地図データベース13の情報とに基づいて、目標車速設定地点での自車両の目標車速等を演算するパラメータ演算部8と、車速センサ5により検出された車速及び目標車速等に基づいて、自車両の目標減速度を演算すると共に、その目標減速度から減速アシスト制御量の変更回数を決定する目標減速度演算部10と、目標減速度演算部10により求められた目標減速度及び車速センサ5により検出された車速に基づいて、シフト段数及びブレーキ制御量を演算する制駆動配分演算部11と、シフト段数及びブレーキ制御量に応じてシフト及びブレーキを制御する車両制御部12とを有している。目標減速度演算部10は、目標減速度が高いほど減速アシスト制御量の変更回数を少なくする。
(もっと読む)
車両制御装置
【課題】ドラビリ要求を満たせる車両制御装置を提供すること。
【解決手段】自動変速機40を制御するとともに、原動機10と自動変速機40との間の動力伝達経路上に配設されたトルクコンバータ20における原動機10の回転軸12と自動変速機40の入力軸41とを機械的に結合させるロックアップクラッチ機構26を制御する車両制御装置50であって、所定の車両状態に基づいて、ロックアップクラッチ機構26において係合/開放の切り替えが頻繁に行われそうな状況であると判定したときに、ロックアップクラッチ機構26を制御するためのロックアップ作動領域マップの使用を禁止する。
(もっと読む)
1 - 20 / 137
[ Back to top ]