
Fターム[3K039MA05]の内容
車両の外部照明装置、信号 (9,386) | 回路一般 (707) | 監視装置を持つもの (510)
Fターム[3K039MA05]に分類される特許
1 - 20 / 510
照明制御装置
車両用音響装置
車両用前照灯
制御システム
車両用前照灯制御装置
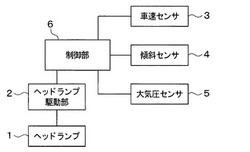
【課題】車体の対路面ピッチ角に応じて光軸方向を制御する技術において、鉛直方向に対して固定された基準面(例えば水平面)に対する車体の傾斜角を検出する傾斜検出手段の出力に基づいて対路面ピッチ角を算出する際、坂道で誤った対路面ピッチ角を算出してしまう可能性を低減することを目的とする。
【解決手段】制御部6は、傾斜検出手段4が検出した絶対ピッチ角と、大気圧センサ5が検出した大気圧の変動量に基づいて、大気圧の変動が少ない場合に、絶対ピッチ角を対路面ピッチ角とする。あるいは、大気圧の変動に基づいて路面勾配を算出し、算出した路面勾配と絶対ピッチ角の差を対路面ピッチ角とする。
(もっと読む)
照明装置

【課題】対象者に眩しさを与えず、かつ対象者の存在を認識しやすくする。
【解決手段】照明装置は、対象空間を撮影して得られた画像に基づいて画像認識処理を行う画像認識部、画像認識部による画像認識結果に基づいて、対象空間に存在する対象者の顔に対応する第1領域と当該対象者の顔より下側の体に対応する第2領域を識別する対象者識別部、第1領域が相対的に暗くなり、第2領域並びに当該第2領域を対象者の下側方向へ延長した第3領域が相対的に明るくなるように配光制御信号を生成する対象者配光制御部、および対象者配光制御部によって生成された配光制御信号に応じて対象空間へ光を出射する光照射部を備える。
(もっと読む)
アクチュエーター及び車輌用前照灯
【課題】 初期位置の検出時間の短縮化及び幻惑光の発生を防止する。
【解決手段】 ランプユニット10に連結される出力軸部41を有し少なくとも出力軸部が前後方向へ移動可能とされると共に水平方向において回動可能とされた連結ユニット34を備え、出力軸部が前後方向へ移動されてランプハウジング2が回動されて光の照射方向の調整動作であるレベリング動作が行われ、出力軸部が水平方向へ回動されてランプハウジングが回動されて光の照射方向の調整動作であるスイブル動作が行われ、磁極の第1の境界52bを検出することにより連結ユニットの前後方向における移動位置を検出する第1の磁気検出部32と、磁極の第2の境界53bを検出することにより連結ユニットの水平方向における回動位置を検出する第2の磁気検出部33とを設け、第1の境界と第2の境界を連結ユニットに設けた。
(もっと読む)
ヘッドランプシステム
【課題】夜間走行時に運転者が車両の前方に位置する障害物に対する視認性をより向上させ得るヘッドランプシステムを提供する。
【解決手段】
本発明は、ヘッドランプシステムに関し、ヘッドライトと、車両の前方に照射される照射領域を異にする複数個の光学モジュールを備えるスポットライトユニットを備えるヘッドランプとを含み、前記複数個の光学モジュールのうち、車両前方の障害物の位置に該当する照射領域を有する光学モジュールが点滅し、さらにその点滅する点滅周期が車両の速度に応じて変化することを特徴とする。このような構成により、本発明は、点滅するビームを介して視覚的に注意が換気され障害物の視認性を高めることができる。さらに、点滅する点滅周期を車両の速度に応じて変化させることにより、車両の速度に関係なく運転者の視認性を高めることができる。
(もっと読む)
光源制御装置
【課題】より車両用灯具に取り付けやすい光源制御装置を提供する。
【解決手段】光源制御装置100は、車両用前照灯10に取り付けられ、車両用前照灯10のLEDを制御する。光源制御装置100は互いに重なるよう配置された第1回路基板102、第2回路基板104を備える。第1回路基板102、第2回路基板104のそれぞれは、LEDを制御する制御信号が伝達される共通の制御配線と接続されると共に、その制御信号に基づいてLEDに電力を供給する。第1回路基板102、第2回路基板104のそれぞれはLEDへの電力の供給を制御するマイクロコントローラを有する。そのマイクロコントローラは共通の制御配線から制御信号を受信する。
(もっと読む)
ヘッドライト装置、及びヘッドライトシステム
【課題】信頼性を損なうことなく、より多くの配光パターンを形成することができるヘッドライト装置、及びヘッドライトシステム等を提供する。
【解決手段】ヘッドライト装置110は、ヘッドライト112と、LCD制御部114と、光変調装置としてのLCDパネル116とを備えている。ヘッドライト112は、前方に光の照射が可能に構成される。LCDパネル116は、ヘッドライト112の照射光の光路上に配置され、該照射光の照射位置に応じて光変調率の制御が可能に構成される。LCD制御部114は、LCDパネル116の画素単位に駆動制御を行う。
(もっと読む)
車両用前照灯制御装置
【課題】車両に搭載される車両用前照灯制御装置において、自車両が走行している道路が左側走行道路か右側走行道路かを推定し、当該道路の車線数を推定し、その推定結果に応じた光軸制御を行う。
【解決手段】車両の前方の撮影画像に写された他車両の光源が先行車の光源であるか対向車の光源であるかを検出し(ステップ120)、撮影画像に写された他車両の光源から、当該他車両の位置座標を検出し(ステップ130)、他車両の位置座標が正面方向よりも右か左かで、左側通行か右側通行か推定し(ステップ140)、他車両が先行車か対向車か、および、他車両の位置座標に基づいて、車線数を推定し(ステップ150)、それら推定結果に基づいて、光軸の左右方向の変動許容範囲を変化させる(ステップ150)。
(もっと読む)
ヘッドライト制御装置、ヘッドライトシステム、及びヘッドライトシステムの制御方法
【課題】前走車や対向車のみならず、人や動物等にも配慮したハイビームの照射が可能なヘッドライト制御装置、ヘッドライトシステム、及びヘッドライトシステムの制御方法等を提供する。
【解決手段】ヘッドライト制御装置120は、熱源検知部としての赤外線カメラ122と、熱判定部124と、ビーム方向制御部128とを備えている。赤外線カメラ122は、ヘッドライト112の照射範囲の熱画像を取得する。熱判定部124は、赤外線カメラ122により取得された熱画像に基づいて、熱画像の有無を判定する。ビーム方向制御部128は、熱判定部124の判定結果により照射範囲の熱源を検知したとき、ヘッドライト112の照射光が熱源に照射されないように照射範囲を切り替える制御を行う。
(もっと読む)
車両用前照灯の配光制御システム
【課題】比較的急なカーブを走行する際に、運転者が無意識のうち速度を上げてしまうことを抑制することができる車両用前照灯の配光制御システムを提供する。
【解決手段】自車両の車速を算出する車速算出手段と、自車両の走行する道路の曲率を算出する曲率算出手段(41)と、車速算出手段から得られる自車両の車速と曲率算出手段(41)から得られる道路の曲率を関連付けて記録する走行記録手段(42)と、現在走行する自車両の車速が、走行記録手段(42)の記録に基づき、現在走行する道路とほぼ同様の曲率を有する道路の前記曲率に関連付けられた車速よりも上昇傾向にあることを検知する車速上昇検知手段(46)と、車速上昇検知手段(46)によって自車両の車速が上昇傾向にある場合、前照灯のそれまでの配光から減速を促す他の配光に切り替える配光切替手段(47)と、を備える。
(もっと読む)
光軸制御装置
【課題】走行時の車体ピッチ角に対し時間的な遅れが抑制されたヘッドランプ照射角度の適切な制御を実現できる光軸制御装置を提供する。
【解決手段】車体が一定以上の大きさの上下加速度を受けると、そのときの車両ピッチング減衰特性を上下加速度に対応させて車両減衰特性データベース3へ記録し、一定以上の大きさの上下加速度を受けるたびに更新されるようにする。さらに一定範囲内の大きさの上下加速度入力時の車両ピッチング減衰特性を車両減衰特性データベース3へ記録する。一方、一定以上の大きさの上下加速度を車体が受けると、前記上下加速度に対応して車両減衰特性データベース3に記録されている車両ピッチング減衰特性を読み出し、逆位相のヘッドライト照射角制御信号をフィードフォワード的にヘッドライト照射角制御信号生成手段18により生成し、時間的な遅れなくヘッドライトの照射角を制御する。
(もっと読む)
車両用スポットランプ制御装置および車両用スポットランプシステム
【課題】2つのスポットランプを用いて、より最適な照射制御を実現する。
【解決手段】車両用スポットランプシステムにおいて、左スポットランプおよび右スポットランプは、それぞれ複数の発光素子を有し照射方向を変更可能に設けられている。カメラおよび画像処理部は、車両前方の歩行者位置を検出する。スポットランプECUは、検出された歩行者位置を取得する。スポットランプECUは、取得した歩行者位置に向けて光が照射されるよう、右スポットランプおよび左スポットランプによる光の照射を制御する。スポットランプECUは、2つの歩行者位置を取得した場合、右の歩行者位置に向けて右スポットランプが光を照射し、左の歩行者位置に向けて左スポットランプが光を照射するよう、右スポットランプおよび左スポットランプの光の照射方向を制御する。
(もっと読む)
車両用制御装置
【課題】車両の走行状況に応じて、より運転者の意図に近い形でライトを制御できる車両用制御装置を提供する。
【解決手段】本発明の車両用制御装置1は、車両2前方の複数の距離における各照度を測定するカメラ5と、各照度から車両2進行方向の照度推移を判定する照度推移判定部4bと、照度推移から車両2のライト3を点灯する点灯モードか、ライトを消灯する消灯モードかのライトモードを判定して、ライトモードに応じてライトの点灯又は消灯を制御するライト制御手段4eと、を備える。
(もっと読む)
車両の防眩制御装置
【課題】情報検出時点以降に対向車両又は先行車両になりうる他車両を検出し、適切に自車両のヘッドライトをハイビームとロービームとに切替えることができるようにした、車両の防眩制御装置を提供する。
【解決手段】
周辺道路情報検出手段17は、車両1の前方の交差道路を検出し、他車両情報検出手段14は、他車両2の位置情報と他車両2における右左折予定情報とを検出し、配光制御手段15は、周辺道路情報検出手段17により車両1の前方に交差道路があることが検出され、且つ、他車両情報検出手段14により他車両2が交差道路から進入しうる位置にいることが検出された場合、少なくとも他車両2において右左折予定情報が得られていることを含む配光制御条件が成立したら、車両1のヘッドライトをロービームにする。
(もっと読む)
車両の防眩制御装置
【課題】情報検出時点以降に対向車両又は先行車両になりうる他車両を検出し、適切に自車両のヘッドライトをハイビームとロービームとに切替えることができるようにした、車両の防眩制御装置を提供する。
【解決手段】
配光制御手段15は、周辺道路情報検出手段17により車両1の前方に交差道路があることが検出され、且つ、他車両情報検出手段17により他車両2が交差道路から進入しうる位置にいることが検出された場合、少なくとも他車両2の走行ルート設定手段25により設定された走行ルートに従って他車両2が走行すれば他車両2が交差道路から右折又は左折をして進入することを含む配光制御条件が成立したら、車両1のヘッドライトをロービームにする。
(もっと読む)
前照灯制御装置
【課題】前方車両との相対速度に応じて、安全な夜間走行が可能となるように前照灯を制御することができる前照灯制御装置を提供することを目的とする。
【解決手段】前照灯のハイビームとロービームとの切り換えを制御する前照灯制御部14と、前方車両を検出する前方車両検出部11と、前方車両との車間距離を検出する車間距離検出部12と、前方車両の相対速度を検出する相対速度検出部13とを備え、前照灯制御部14は、前方車両を検出した場合、相対速度検出部13で検出した相対速度に対応する該当車間距離閾値を決定し、車間距離検出部12で検出した車間距離が該当車間距離閾値を超えたことを条件として前照灯2をロービームからハイビームに切り替える。
(もっと読む)
前照灯装置
【課題】前方の車両数が多い場合に、車両位置を適切に管理する前照灯装置を提供すること。
【解決手段】前方車両の存在に応じて配光パターンを変化させることができる前照灯装置100において、前方車両を検出し、近接した複数の前方車両のうち右端及び左端の前方車両の位置のみを推定する前方車両検出手段11と、右端の前方車両が存在する位置から左端の前方車両が存在する位置までの一連の配光領域を除き前方を照明する照明領域制御手段12と、を有することを特徴とする。
(もっと読む)
1 - 20 / 510
[ Back to top ]