
Fターム[4C038VA11]の内容
生体の呼吸・聴力・形態・血液特性等の測定 (31,718) | 目的 (3,598) | バランス機能解析 (99)
Fターム[4C038VA11]に分類される特許
1 - 20 / 99
映像生成装置、映像生成方法及びプログラム
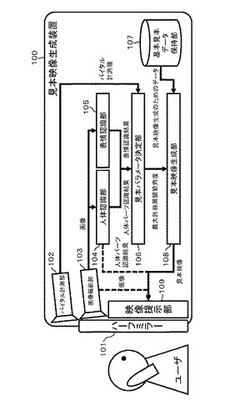
【課題】少ない手間で、運動する人に合った姿勢の見本映像を生成して提示できるようにする。
【解決手段】表情認識部105は、痛みを感じている表情であるか否かを判別し、見本パラメータ決定部106は、その表情の判別結果によって無理のない範囲を示すものとして、見本パラメータを決定する。見本映像生成部108は、この見本パラメータを参照し、基本見本データ保持部107に保持されている運動に係る基本映像を修正して、その人物に適した見本映像を生成し、映像提示部109によりその見本映像を表示することによって、人物の適正に合った見本映像を提供できるようにする。
(もっと読む)
検査装置

【課題】操作性を向上しやすい。
【解決手段】棒状の像を窓部6に向かって表示する円盤部材7が円筒部3内に設けられている。円盤部材7の軸8にはプーリ12が固定されている。ハンドル9の軸10にはプーリ11の軸11aが連結している。プーリ11とプーリ12との間にはベルト14が巻き掛けられている。ハンドル9を回すと、これに連動して円盤部材7が回転する。
(もっと読む)
歩行分析装置及び歩行分析プログラム
【課題】短時間で歩行状態を推定することができる歩行分析装置を提供することである。
【解決手段】実施形態の歩行分析装置は、計測部と、判定部と、特徴量算出部と、推定部と、を有する。計測部は、対象者の動きを計測する。判定部は、対象者の動きに基づいて、対象者が歩行を開始した歩行開始時点を判定する。特徴量算出部は、歩行開始時点が判定された場合、対象者の動きが定常化していない期間として予め定めた歩行開始時点からの期間に計測された対象者の動きの特徴量を算出する。推定部は、特徴量に基づいて、対象者の歩行状態を推定する。
(もっと読む)
動作支援装置
【課題】要介護者の動作負担が軽い動作支援装置を提供することを課題とする。
【解決手段】動作支援装置1は、搭乗部23と、搭乗部23に対して回動可能な下肢フレーム20と、下肢フレーム20に対して回動可能な上肢フレーム21と、上肢フレーム21に対して回動可能であって要介護者Aの身体の一部を保持する保持部22と、を備え、要介護者Aの起立動作および着座動作のうち少なくとも一方を支援することを特徴とする。要介護者Aは立位のまま、保持部22により保持される。このため、移動する際の要介護者Aの動作負担が軽い。
(もっと読む)
姿勢バランス測定装置
【課題】バランス機能向上を目的としたトレーニングのための測定データを取得することが可能な姿勢バランス測定装置を提供する。
【解決手段】姿勢バランス測定装置100は、人が直立して乗る起立台120と、起立台120を動かすことによって、起立台120に乗った人の姿勢バランスを動揺させる制御部と、起立台120に乗った人の身体重心の位置を測定するフォースプレートと、を備え、制御部は、起立台120を水平方向に移動させることによって、起立台120に乗った人に移動刺激を与える移動刺激印加手段と、起立台120を水平方向に回転させることによって、起立台120に乗った人に回転刺激を与える回転刺激印加手段と、を有する。
(もっと読む)
足の診断装置およびそれを用いた靴またはインソールのフィッティング・ナビゲーション・システム
【課題】足底圧の計測において荷重が検出されない欠損部分がある場合でも足底の重心バランスの偏りを常に精度よく判定できる足の診断装置およびそれを用いた靴またはインソールのフィッティング・ナビゲーション・システムを提供する。
【解決手段】足底圧の圧力分布を計測する足底圧計測センサ20、足を撮像するテレビカメラ30、処理装置40を備え、足底圧データ取得部41により足底圧データを取得し、足画像取得部42により足画像を取得し、足外形寸法演算部44により足の外形位置を検出して足の外形寸法を演算し、足底重心位置演算部43により、検出された足の外形位置を基準とした足底重心位置を演算し、重心バランス判定部45により足底重心位置と足外形寸法とに基づいて重心バランスの偏りを判定する。また、足の症状判定部46により足の症状を判定し、選定部47により重心バランスの偏りと足の症状に基づいて靴またはインソールを選定する。
(もっと読む)
運動能力検査装置
【課題】歩行が困難であっても立つことができれば使用者の歩行機能を計測することができる運動能力検査装置を提供する。
【解決手段】刺激装置50は、左右の足をそれぞれ載せる一対の足置台211、212を備え、足置台211、212を時間経過に伴って変位させることにより、立位である使用者の下肢部に筋刺激を与える。計測装置60は、刺激装置50による筋刺激に関連する使用者の身体の応答に関する情報を計測し、使用者に関する7種類の歩行機能情報を計測する。
(もっと読む)
動作検出装置、動作検出ユニット、動作検出システムおよび動作検出方法
【課題】高齢者等の検出対象者における転倒発生を検出・通報可能にするとともに、平常時から日常生活を見守る機能をも備えた動作検出装置を提供すること。
【解決手段】動作検出装置4は、検出対象者に携帯もしくは装着されて用いられ、検出対象者の歩行等の運動に基づき加速度を検知する3軸加速度センサ1と、3軸加速度センサ1によるセンサ信号を処理する信号処理手段2と、信号処理手段2により得られた処理信号を外部に対して送信可能な通信手段3とを備えて構成される。信号処理手段2としては、マイクロコンピュータやマイクロプロセッサ等が用いられる。また、3軸加速度センサ1により、X,Y,Z方向の加速度計測を行う。
(もっと読む)
電子機器、及び傾きバランス算出プログラム
【課題】被験者の運動中の姿勢異常を精度良く検知することである。
【解決手段】携帯電話10は、6軸センサ16とプロセッサ11とバイブレータ部17とを有する。6軸センサ16は、第1の軸の方向の加速度を検出すると共に、前記第1の軸と直交する第2の軸周りの角速度を検出する。プロセッサ11は、6軸センサ16により検出された複数時点の加速度の変位値に基づいて、1歩毎に現れる所定の特徴変位の時点を抽出する。プロセッサ11は、6軸センサ16により検出された角速度の変位値に基づいて、前記時点の変位が何れの方向に対応する変位であるかを判定する。プロセッサ11は、前記時点、前記角速度の変位値、及び前記方向に基づいて、左右の傾きバランスに関する情報を算出する。バイブレータ部17は、前記左右の傾きバランスに関する情報に基づいた通知を行う。
(もっと読む)
身体能力判定装置及び身体能力判定方法
【課題】被験者の身体能力を効率的に判定する。
【解決手段】運動特徴量観測部110が、被験者の身体の動きを検出する身体状態計測センサ191から供給されるセンシング情報に基づいて、被験者の身体の動きの特徴を示す運動特徴量を算出し、身体能力判定部120が、基準情報格納部130に格納されている運動特徴量と身体能力の評価値との対応を特定するための基準情報に基づいて、被験者の運動特徴量から、被験者の身体能力を示す評価値を特定する。また、運動特徴量から得られるリャプノフ指数と身体能力の評価値との対応が基準情報に記載されており、身体能力判定部が、力学系の計算技術を用いて被験者の運動特徴量の発散性を示す値(リャプノフ指数)を算出し、算出されたリャプノフ指数に対応する評価値を特定することも可能である。
(もっと読む)
足部バランス評価装置及び訓練器及び訓練方法
【課題】若年者から,高齢者まですべての年代の被検者を対象とし,足部バランス修正能力を評価し,訓練することで,被検者のバランス能力,及び転倒予防を含めた健康維持,管理に役立つことが出来るものとする。
【解決手段】計測器の上に両足,または片足で立った被検者の母趾部,母趾球部,小趾球部,及び踵部からの圧変動を捉える計測部1と,圧変動計測部から得られる信号を増幅する信号増幅部8と,増幅される結果を解析し,解析された結果を保存し,結果から判断された評価を,被検者個人間や他人とで比較し,結果から被検者に適した訓練方法を選択する比較評価部12,データベース部11と,その結果や,蓄積した結果から導き出される訓練方法を表示するディスプレー表示部13の構成とすることで,足部バランス評価装置及び訓練器を提供する。本装置並びに訓練器により,足部バランス修正,及びに転倒予防を含めた健康維持,管理を実現する。
(もっと読む)
重心移動訓練システム
【課題】使用者ごとにそれぞれ適した重心移動訓練を実施させることができる重心移動訓練システムを提供する。
【解決手段】モード切替部52は、訓練モードと設定モードとの2つの動作モードを切り替える。表示処理部53は、訓練モードにおいて、操作図像と操作図像の追尾の対象となる目標図像とを表示面30に表示させる。操作処理部54は、訓練モードにおいて、測定装置4で測定される使用者2の重心位置に基づいて、表示面30における操作図像の表示位置を変化させる。設定モードにおいては、評価部56が設定モード中に記憶部55に記憶された重心情報から使用者2の重心位置の偏りを評価する。設定決定部57は、訓練モードにおける表示面30上の目標図像の位置を決める設定データを、訓練モードが開始する前の設定モードにおいて評価部56の評価結果に基づいて決定する。
(もっと読む)
運動特性評価システムおよび運動特性評価方法
【課題】被測定者の運動特性を評価する。
【解決手段】被測定者の左右の足底部にかかる圧力と各足底部の位置的な遷移とを測定する第1検出部と、被測定者の胴部の位置的な遷移を測定する第2検出部と、被測定者の質量および重心高さを取得して記憶するパラメータ記憶部と、第1および第2検出部が測定したデータを取得して被測定者の運動特性モデルを決定する特性決定部と、決定された運動特性モデルを予め用意された基準モデルと比較して被測定者の運動特性を評価する特性評価部とを備え、前記特性決定部は、被測定者の前後方向と直交する垂直面での重心位置を推測してその遷移を得、かつ、前記垂直面で重心に作用するモーメントを求め、前記重心位置の遷移から身体左右方向の揺れ成分を除去して前記重心の目標位置を取得し、前記目標位置に対する前記重心位置の偏差を入力とし前記モーメントを出力として前記運動特性モデルを決定する運動特性評価システム
(もっと読む)
運動支援システム
【課題】使用者に正しい運動を習得させることができる運動支援システムを提供する。
【解決手段】運動支援システム1は、測定装置4の測定結果に基づき使用者2の運動に伴う左右の荷重の分布の変化を検出する運動検出部51と、距離画像センサ6で得られた距離画像から使用者2の左右の肩部の位置を検出する位置検出部55とを制御装置5に有している。ずれ量検出部56は、検出された肩部の位置に基づいて、左右の両肩部を結ぶ直線の水平面からの傾きを、ずれ量として検出する。評価部57は、運動検出部51で検出された荷重の分布の変化と、ずれ量検出部56で検出されたずれ量とを用いて、運動が正しく行われているか否かを評価する。評価部57の評価結果は、提示部としての表示装置3に表示される。
(もっと読む)
つま先接地法による足踏みを用いた回転角検出装置及び方法
【課題】
上記従来の足踏み検査法の欠点を解消しつつ、偏倚を定量化できる回転角を検出する。
【解決手段】
被験者が載る1つの踏み台と、つま先接地法による足踏み前において、被験者が前記踏み台上で静止起立した時の被験者の動揺中心位置を第1座標として取得する手段と、つま先接地法による足踏み後において、被験者が前記踏み台上で足踏み終了時の立ち位置において静止起立した時の被験者の動揺中心位置を第2座標として取得する手段と、身体の回転中心を、左右の足の拇指球接地部を結ぶ線上から選択し、前記回転中心と前記第1座標とを結ぶ線と前記回転中心と前記第2座標とを結ぶ線との角度を、身体の回転によって生じた回転角として取得する手段と、を備えた、回転角検出装置。
(もっと読む)
足首インピーダンスの測定装置
【課題】正確に足首インピーダンス(弾性係数と粘性係数)を求めることができる、新規な測定装置を得る。
【解決手段】本発明に係る測定装置は、座位姿勢における被験者2の足首インピーダンスを測定する装置である。この測定装置は、被験者2が着座したときに、被験者2の臀部2aを受け止める着座板11と、水平に配された回転軸18まわりに揺動回転可能に構成されて、被験者2の足先2bが載せられるフットプレート12と、回転軸18を介して、フットプレート12に駆動回転力を付与する駆動源と、揺動回転時にフットプレート12に加わるトルクを検出するためのトルク検出手段と、揺動回転時のフットプレート12の傾斜角度を検出するための角度検出手段とを備える。
(もっと読む)
重心移動訓練システム
【課題】使用者にスムーズな重心移動を習得させるための訓練が可能な重心移動訓練システムを提供する。
【解決手段】算出部は使用者の左右の荷重の比率を表すバランス値を算出し、指標生成部は、このバランス値に基づいて、指標映像31を生成して表示装置3に表示させる。模範生成部は、記憶部に記憶されている設定値に従って、重心移動の模範となるバランス値の周期的な変化を示す模範映像32を生成して表示装置3に表示させる。これにより、使用者に対して、模範映像32中の棒グラフの動きを指標映像31で追従するように、左右の各脚に掛かる荷重の割合を変化させるための重心移動を行わせることができる。評価部は、模範映像32と指標映像31との間でバランス値が変化するタイミングのずれを評価し、その評価結果は提示部により提示される。
(もっと読む)
重心動揺計
【課題】測定者の負担を軽減しつつ測定の信頼性を十分に確保可能な重心動揺計を提供する。
【解決手段】重心動揺計100は、被験者が載る測定面11を有する載台10と、複数の荷重センサ12と、メイン制御装置を備える。メイン制御装置は、重心動揺測定を行うたびに、測定面11における被験者の重心位置の変動量を示す単位時間軌跡長と、測定面に垂直に作用する荷重の変動量を示す体重当たりの荷重変動平均値との比に基づいて、正常な状態で当該重心動揺測定が行われていたか否かを判定する。
(もっと読む)
情報処理方法、装置及びプログラム
【課題】加速度センサによって計測された加速度値から物体の重心動揺を高精度に推定する。
【解決手段】本情報処理方法は、物体に備えられた加速度センサにより所定のサンプリング間隔で計測された加速度の値に対して所定の補正を行い、加速度の補正後の値をデータ格納部に格納する工程と、物体の位置を加速度及び初速度から求めるための第1関係式並びに物体の重心動揺で物体にかかる力をバネモデルの運動方程式で表すことにより得られる第2関係式を所定期間内の加速度の離散値と所定のサンプリング間隔とから初速度を得られるように変形した第3関係式に、所定期間内の加速度の補正後の値を代入して、物体の初速度の値を算出する工程と、第1の関係式に、所定期間内の加速度の補正後の値と初速度の値とを代入して、物体の重心位置を表す、水平面における座標値を算出する工程とを含む。
(もっと読む)
感覚統合運動機能の計測装置
【課題】把持動作データの取得から、感覚統合運動機能の定量的評価を行う。
【解決手段】感覚統合運動機能の計測を行う計測装置は、被験者によって把持される柔軟性のある測定部本体11と、測定部本体11の歪みを測定する歪みゲージ12と、歪みゲージ12で測定された信号を処理するブリッジ回路20と、ブリッジ回路20で処理された信号を増幅する信号増幅アンプ40と、信号増幅アンプ40で得られた数値を処理することができる処理装置40と、処理装置40で処理された結果を表示する表示部50とを備える。
(もっと読む)
1 - 20 / 99
[ Back to top ]