
Fターム[4C038VB14]の内容
生体の呼吸・聴力・形態・血液特性等の測定 (31,718) | 測定対象 (4,537) | 人体 (3,247) | 足 (356)
Fターム[4C038VB14]の下位に属するFターム
重心の測定 (76)
Fターム[4C038VB14]に分類される特許
41 - 60 / 280
姿勢検出装置
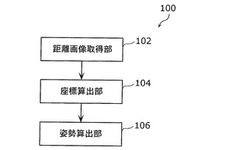
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
運動解析装置

【課題】被験者の運動フォームとリファレンスの運動フォームとの差を定量的に解析可能な情報が得られる運動解析装置を提供すること。
【解決手段】
運動解析装置1は、被験者に取り付けられる複数のモーションセンサー10と、モーションセンサー10の各々の出力データに基づく情報を取得するデータ取得部31と、データ取得部31が取得した情報に基づいて被験者をモデル化した被験者モデルの軌跡情報を生成する軌跡情報生成部32と、リファレンスモデルの軌跡情報を記憶する軌跡情報記憶部62とを含む。軌跡情報生成部32は、軌跡情報記憶部62からリファレンスモデルの軌跡情報を読み出して、被験者モデルの軌跡情報およびリファレンスモデルの軌跡情報を比較し、被験者モデルの軌跡情報及びリファレンスモデルの軌跡情報の少なくとも一方に対して、被験者モデルのサイズとリファレンスモデルのサイズとを一致させるサイズの正規化を行う。
(もっと読む)
ダイナミック膝関節複合診断装置
【課題】体重を負荷した状態で膝を含んだ運動による膝関節情報と姿勢情報をリンクさせた、より日常行動に準じた状況での膝関節機能と姿勢制御機能を推測する多方面からの総合的診断法と装置を提供することを可能とする。
【解決手段】頭部の3次元変位を計測する頭位変位感知器1と、膝の3次元変位を計測する膝変位感知器2と、膝の角度を計測する膝角度感知器3と、前記頭位変位感知器1、膝変位感知器2、膝角度感知器3からそれぞれ計測される情報を処理する情報処理装置4とからなり、体重を負荷した起立位、及び膝の屈伸運動等時の変位計測と、膝関節の角度と膝のゆれの計測情報を情報処理装置4で処理し、膝関節を総合的に診断することを特徴とする。
(もっと読む)
角度計
【課題】アーム部の長さが短くても高精度な角度測定を行える。
【解決手段】角度計1は、第一アーム部2と第二アーム部3が支軸を中心に相対回転可能に支持される。第一アーム部2の中心線は角度表示器5の0度に位置合わせする。支軸と同軸に角度表示器5を第一アーム部3の一端に固定する。第二アーム部3の自由端部に角度器10を設ける。角度器10は周方向に角度目盛りを付した角度表示部8を表示ケース7で囲い一体に回転可能とする。表示ケース7内に設けた球体9は重力方向に位置する。角度器10を関節等に位置決めし、第一アーム部2と第二アーム部3を体幹に沿って直線状に配列し、重力方向に位置する球体9に角度表示部8の0度を一致させる。そして、角度器10を中心に直線の第一アーム部2と第二アーム部3を腕部または大腿部に一致させることで、球体9が回転角度を表示する。
(もっと読む)
歩行能力測定装置
【課題】歩行能力を評価するのに適した指標を計測する歩行能力測定装置を提供する。
【解決手段】歩行能力測定装置100は、荷重センサ19と足位置センサ23、25と表示装置30を備える。荷重センサは、歩行中に脚の足裏が床面から受ける荷重を計測する。足位置センサは、腰位置に対する前後方向における脚の足位置を計測する。表示装置は、センサデータを加工し計測結果を表示する。表示装置は、足位置センサのセンサデータに基づいて、一歩毎に荷重が予め定められた第1荷重閾値を超えたときの第1足位置と、荷重が予め定められた第2荷重閾値を下回ったときの第2足位置を計測する。表示装置は、計測された複数歩分の第1足位置と第2足位置を表示する。
(もっと読む)
足首インピーダンスの測定装置
【課題】正確に足首インピーダンス(弾性係数と粘性係数)を求めることができる、新規な測定装置を得る。
【解決手段】本発明に係る測定装置は、座位姿勢における被験者2の足首インピーダンスを測定する装置である。この測定装置は、被験者2が着座したときに、被験者2の臀部2aを受け止める着座板11と、水平に配された回転軸18まわりに揺動回転可能に構成されて、被験者2の足先2bが載せられるフットプレート12と、回転軸18を介して、フットプレート12に駆動回転力を付与する駆動源と、揺動回転時にフットプレート12に加わるトルクを検出するためのトルク検出手段と、揺動回転時のフットプレート12の傾斜角度を検出するための角度検出手段とを備える。
(もっと読む)
体動検出装置
【課題】ノイズに起因する体動の誤カウントを防止すること。
【解決手段】加速度センサが出力する加速度の大きさに基づいて、下弦ピークの値と当該下弦ピークのつぎに検出された上弦ピークの値との差分(第1の差分)の第1の閾値に対する大小を判断するとともに、第1の差分の後に出現した上弦ピークの値と当該上弦ピークのつぎに検出された下弦ピークの値との差分(第2の差分)の第2の閾値に対する大小を判断し、第1の差分が第1の閾値以上であって、かつ、その後に出現した第2の差分が第2の閾値以上である場合に体動を検出する体動検出装置を構成した。
(もっと読む)
浮腫改善装置及び方法
【課題】使用者に生じる浮腫を効果的に改善する浮腫改善装置等を提供すること。
【解決手段】使用者の身体の一部に対して、少なくとも、マッサージ動作を行うマッサージ部27と、使用者の身体の状態を計測する計測部28と、を有し、計測部は、少なくとも、マッサージ部のマッサージ動作の前後に計測を行い、その測定結果情報を記憶する構成となっており、マッサージ動作後の計測結果情報を、既に記憶済みの計測結果情報である既登録計測結果情報と比較して、使用者の身体の浮腫状態が改善したか否かを判断する構成となっている浮腫改善装置10。
(もっと読む)
歩行状態表示システム等
【課題】対象者の歩行状態を的確に把握可能な歩行状態表示システム等を提供する。
【解決手段】本発明は、歩行にともなう重心変動と脚部の関節角度の変動を計測し、前記計測された重心変動、関節角度の変動、及び歩行によって変化しないユーザの人体情報に基づいて前記ユーザの歩行動作を示す指標を演算し、前記指標を表示する。
(もっと読む)
足部体積測定器
【課題】従来の足部体積測定器では、水面波が発生しやすく、その減衰に時間が掛かるため、精度と再現性をより高くし、また測定時間を短縮することができる測定器を提供すること。
【解決手段】上側を開口した容器2の底面側断面形状を足の形状に対応して細長形状に構成すると共に、開口側断面形状は、爪先側3を短縮させて開口断面積を低減させた形状とし、底面側と開口側間には面積の変化に対応させて傾斜壁5を設け、開口断面積が低減した高さにおいて、踵側4の壁に溢水部7を設けた構成の足部体積測定器1とした。
(もっと読む)
人工の四肢の機能的な解析を実施するための方法
【課題】人工の四肢の機能的な解析を複雑な測定ハードウエア無しで可能にすること。
【解決手段】人工の四肢は、基本的な機能を実行するためのセット30であって、少なくとも一つの取り外し可能な機能的部分を備えたモジュール方式でデザインされ、特にこの部分が、付加的な機能を可能にする。複雑な外部の装置及び測定デバイスを使用することなく解析を実施するために、前記機能的部分の組み込みに関係する寸法に対応するサイズのセンサー・アセンブリ33’が、前記取り外し可能な機能的部分の代わりに組み込まれる。前記センサー・アセンブリ33’は、次に、前記人工の四肢の基本的な機能のセッティングを最適化するために、前記人工の四肢30の使用中に発生する力、加速度および/またはトルクを測定する。前記センサー・アセンブリ33’は、その後で、前記機能的部分で置き換えられ、最適化されたセッティングが維持される。
(もっと読む)
足裏滑り検出装置およびインソール
【課題】歩行時の靴内部における足の滑りを計測することが可能な足裏滑り計測装置を提供する。
【解決手段】履き物10(またはインソール)に固定されるセンサ部2と、センサ部2に接続され、センサ部2の電気抵抗値の変化を計測する計測装置3を備える。センサ部2は、基布21に複数のパイル22が立設されたパイル布帛20からなり、パイル布帛20は、弾性糸からなる芯糸40に導電性を有する巻糸41,42を巻き付けてなるカバリング糸4を織り成すことにより形成される。巻糸41,42は、導電性繊維と非導電性繊維とを混紡することによって、伸縮に応じて電気抵抗値が変化する感圧導電性糸により構成される。
(もっと読む)
歩行変化判定装置
【課題】歩行の変化度合をより正確に判定すること。
【解決手段】歩行変化判定装置は、本体部と、本体部の加速度を検出するための加速度センサと、制御部とを備え、本体部を所定部位に装着するユーザの歩行の変化を判定するための装置である。制御部は、加速度センサによって検出された加速度に基づいて、本体部が装着される所定部位の歩行時の軌跡を特定し(S103)、特定された軌跡の時間的変化を算出し(S104,S105,S111,S112)、算出された時間的変化に基づいて、時間的変化の度合である変化度合を判定する(S113)。
(もっと読む)
周期推定装置、周期推定方法、及びプログラム
【課題】低サンプリングレートの加速度データに対しても適用でき、かつ、少ない計算量により、2つ1組の運動動作1つ分の期間を示す運動周期(歩行周期)を、2つのいずれかによる加速度データが他方の加速度データに比べ大きく観測されてしまった、歪の大きなデータであっても高精度に推定する。
【解決手段】AMDF演算部15は、携帯される加速度計測部10によって取得された加速度データに対して、AMDF演算を行う。周期判定部17は、AMDF演算部15により算出されたAMDF結果の最小値と、この最小値に基づいて定めたAMDF結果の抽出範囲における極小値とに基づいて、歩行動作1歩分の期間を示す歩行周期を推定する。
(もっと読む)
運動検出装置、および、運動検出装置の制御方法
【課題】ユーザの運動状態の誤判別を減少させることが可能な運動検出装置を提供すること。
【解決手段】運動検出装置によって、検出部によって検出されたデータから、体動が判別され、検出部によって検出されたデータから体動ごとの移動状態が判別され、予め定められたルールに基づいて、移動状態の補正が行なわれ、判別された結果から、ユーザの運動状態が算出され(115)、算出された運動状態が記憶部に記憶される。
(もっと読む)
歩行解析システムおよび歩行解析方法
【課題】測定場所の制限がなく、下肢の関節の動作を把握可能で、歩行状態をより細かく評価することができる歩行解析システムおよび歩行解析方法を提供する。
【解決手段】各測定センサS1〜S7が、歩行者1の両足の股関節、膝関節および足関節を挟むよう取り付けられ、歩行者1の歩行時の角速度および加速度を測定して測定データを出力する。歩行解析部12が、測定センサS1〜S7から出力された測定データを受信し、受信した測定データに基づいて、歩行者1の股関節、膝関節および足関節の関節角度を求め、さらに、それ以外の歩行情報も求める。歩行解析部12は、関節角度とそれ以外の歩行情報との関係に基づいて、歩行者1の歩行状態の評価を行う。
(もっと読む)
体動信号についての情報処理方法、体動信号についての情報処理システム、体動信号についての情報処理装置、プログラムを記録した記録媒体およびプログラム
【課題】被験者が少なくとも人の体の繰り返しリズム運動を非侵襲的かつ連続的に計測する。
【解決手段】体動信号検出部を有する体動信号検出装置を携帯することにより得られた体動信号情報について、情報処理装置において以下の(1)〜(3)の工程を含む情報処理を行い、前記情報処理にて得られた結果を抽出する。(1)前記体動信号情報についてパターンマッチング処理を施して、前記リズム運動に関するリズム周期候補としてのリズム周期候補波を抽出する周期候補抽出工程;(2)前記体動信号情報について−1回以上積分を行って運動軌道を取得し、前記運動軌道についての粗視化を行って補助波を作成する補助波作成工程;(3)上記の周期候補抽出工程で抽出されたリズム周期候補波と、上記の補助波作成工程で得られた補助波とを重ね合わせ、前記補助波内でピークを有するリズム周期候補波の周期を真の周期として選択する周期選択工程。
(もっと読む)
歩行解析方法、歩行解析システム及び歩行解析装置
【課題】角速度センサを用いて歩行周期を算出することができる歩行解析方法、歩行解析システム及び歩行解析装置を提供する。
【解決手段】角速度を検出する角速度センサを備え、角速度センサが検出した角速度に基づいて、被験者の歩行周期を算出する歩行解析装置1において、角速度センサが検出した角速度における減少と増加との境目の時点、及び/又は角速度の正負が反転する境目の時点を算出する算出手段と、算出手段が算出した各境目の時点に基づいて、被験者の歩行周期を算出する歩行周期算出手段とを備える。
(もっと読む)
携帯電子機器、歩行軌跡算出プログラム及び歩行姿勢診断方法
【課題】歩行姿勢の軌跡を効率よく取得できる。
【解決手段】被験者の歩行において上下方向の移動に伴う変位値を検出する第1の変位検出部11と、披験者の歩行において所定方向の移動または回転に伴う変位値を検出する第2の変位検出部12と、歩行姿勢に関する基準となる軌跡を記憶する歩行姿勢基準軌跡記憶部13と、検出された複数時点の上下方向の変位値に基づいて、1歩毎に現れる所定の特徴変位の時点を歩行タイミングとして抽出する特徴変位時点抽出部14と、抽出された連続する歩行タイミングを選択し、第2の変位検出部12によって検出された変位値に基づいて、該選択した歩行タイミングの歩行によって生じる軌跡を算出する軌跡算出部15と、算出された軌跡が、歩行姿勢基準軌跡記憶部13によって記憶された歩行姿勢に関する基準を満たすか否かを判定する歩行姿勢判定部16とを備える。
(もっと読む)
床反力計測システム及び方法
【課題】
被験者がフォースプレート上の任意の場所に杖を突きながらフォースプレート上で運動した時に被験者の足に作用する反力を取得する。
【解決手段】
フォースプレートと、先端に荷重センサを備えた杖と、杖の位置および姿勢を取得する手段と、被験者が杖を突きながら1枚の踏み板上で運動した時の床反力F1(F1x、F1y、F1z)及び位置P1(x1,y1)を取得する手段と、杖に作用する反力F2(F2x、F2y、F2z)及び位置P2(x2,y2)を取得する手段と、床反力F1(F1x、F1y、F1z)と杖の反力F2(F2x、F2y、F2z)とから、被験者の足に作用する反力F3(F3x、F3y、F3z)を取得する手段と、床反力F1及び位置P1、杖の反力F2及び位置P2、及び足の反力F3とから、足の反力F3が作用する踏み板上の位置P3(x3,y3)を取得する手段と、を備えている。
(もっと読む)
41 - 60 / 280
[ Back to top ]