
Fターム[4C038VB14]の内容
生体の呼吸・聴力・形態・血液特性等の測定 (31,718) | 測定対象 (4,537) | 人体 (3,247) | 足 (356)
Fターム[4C038VB14]の下位に属するFターム
重心の測定 (76)
Fターム[4C038VB14]に分類される特許
101 - 120 / 280
動作を特徴付ける装置と方法
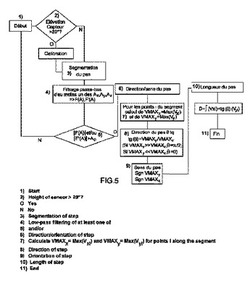
本発明は、物体(特に、少なくとも1つの加速度計を備えた人間の一肢)により行なわれる動作を特徴付ける装置と方法を提案する。本発明は、人間のステップの方向、線、長さを決定するのに特に有用である。本発明は、センサから出力される信号と閾値とを比較することにより、前記一肢の持ち上げと着地とを識別することによりステップを分割し、歩行面にほぼ平行な2つの軸に沿った信号の値の最大値を比較することによりステップの方向と線を決定し、ステップの方向に従って信号を二重積分することによりステップの長さを計算できるようにする、センサからの信号を処理するアルゴリズムを使用する。本発明はまた、上記ステップのものと同様な傾向特性を有する手の動作に適用可能である。 (もっと読む)
歩行補助装置

【課題】ユーザの歩行中に歩行面のスロープ角を正確に検出することのできる歩行補助装置を提供する。
【解決手段】歩行補助装置は、多リンク機構を有する脚装具12R、12Lと、複数の接地センサ28と、傾斜角センサ27と、角度センサ20を備えている。複数の接地センサ28は、ユーザの足を固定する足底リンク26に前後方向に離間して取り付けられている。傾斜角センサ27は、脚装具の上端リンクである支持リンク30に取り付けられており、鉛直に対する支持リンク30の傾斜角を計測する。角度センサは、脚装具の各ジョイントの角度を検出する。この歩行補助装置10は、複数の接地センサがいずれも接地を検知していることを条件として、足底リンクの絶対傾斜角を歩行面のスロープ角として計測する。上記の条件を満足することで、歩行面と足底リンクの平行が保証される。従ってこの歩行補助装置は、歩行面のスロープ角を正確に計測することができる。
(もっと読む)
歩行計測装置
【課題】 簡単な装置構成で設置場所を問わずに歩行者の下肢の動きを定量的に求める。
【解決手段】 歩行計測装置10は、装置全体をモータ20によって自律移動させる移動体11と、歩行者Hの大腿部K1及び爪先部K4の三次元位置・姿勢を測定する位置姿勢センサ13と、位置姿勢センサ13の測定値から、歩行者Hとの相対位置関係を予め設定した一定状態に維持するようにモータ20の動作を制御する移動制御手段34と、歩行者Hの下肢Kの状態を特定するために当該下肢K内に複数設定された特徴点A〜Eの位置を所定時間毎に求める特徴点算出手段35とを備えている。特徴点算出手段35では、予め定めた下肢モデルに基づく演算式に位置姿勢センサ13の測定値を代入することで、前記各特徴点A〜Eの位置を前記所定時間毎に算出する。
(もっと読む)
生体認証装置、生体認証方法及び生体認証プログラム
【課題】生体判定に関し、生体の動きを用いて生体か否かを判定する。
【解決手段】生体の屈伸として例えば、手のひらを開いた状態から握る又は掴む等の閉じた状態への動作又は閉じた状態から開いた状態への動作を撮像して複数の画像を取得し、複数の画像から生体の動きを表す情報を抽出し、その動き情報を用いて生体であるか否かを判定する。また、登録された動き情報(又は動き特徴情報)と被判定者の動き情報(動き特徴情報)とを比較することにより、被判定者が登録者であるか否かを判定する。
(もっと読む)
関節状態の組み合わされた光学及びサーモグラフィ検出装置、システム及び方法
本発明は、関節の状態を光学的に検出する装置、システム及び方法に関する。本発明は、少なくとも1つの関節を含む被検体の身体部位に光を照射し、少なくとも1つの関節において及び身体部位の少なくとも1つの他の部分において、光の減衰を局所的に検出する光学的測定ユニット4、5と、少なくとも1つの関節を含む被検体の身体部位をサーモグラフィによりイメージングするサーモグラフィ測定ユニット3と、光学的測定ユニット4、5及びサーモグラフィ測定ユニット3の一方によって取得されたデータが、光学的測定ユニット4、5及びサーモグラフィ測定ユニット3の他方によって取得されたデータを較正するために使用されるように、装置を制御する制御ユニット9と、を含む。 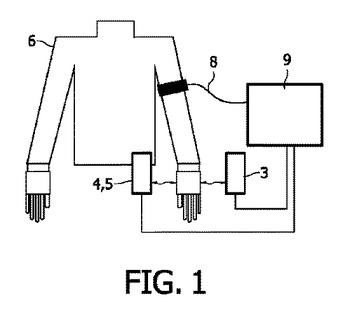 (もっと読む)
(もっと読む)
歩行能力についての評価方法および評価装置
【課題】少ない歩数においても歩行能力を客観的に評価することができる技術の提供。
【解決手段】マイクロコンピュータによって歩行周期を多段階に分割し、グループ化することを前提とする。義足装着者が歩行訓練をするとき、訓練が進むにつれて、時系列的に取得する歩行周期がグループを超えて変化する傾向が大である。そこで、そのような歩行周期の変化、すなわち、グループあるいはブロックの移動回数や頻度の大きさを歩行能力のための評価指標とすることができる。マイクロコンピュータ機能をもつインテリジェント義足などでは、義足自体が備えるマイコン回路およびセンサ手段などを活用して評価を行うことができる。
(もっと読む)
関節の状態の光学的検出方法及び光学的検出用装置
本発明は関節の状態の光学的検出のための装置と方法に関する。本発明は、少なくとも1つの関節を有する被験者の身体部分5を光で照射し、少なくとも1つの関節、及び身体部分5の少なくとも1つの他の部位における光の減衰を局所的に検出することを提案し、光の減衰を局所的に検出するためのサンプリング周波数は被験者の心拍の周波数よりも高い。  (もっと読む)
(もっと読む)
姿勢制御機能診断装置
【課題】三次元的な検査及び解析を行うことができ、より早期かつ正確に診断が可能な姿勢制御機能総合診断装置を提供すること。
【解決手段】情報処理装置と、情報処理装置に接続された足底圧中心計測装置及び診断対象者用表示装置と、を有し、情報処理装置は、足底圧中心計測装置からの出力を三次元的に処理する三次元処理部を有する姿勢制御機能診断装置とする。直子の場合において、情報処理装置に接続された眼球変位計測装置、身体部位変位計測装置、及び、指標表示装置の少なくともいずれかを有することも好ましい。
(もっと読む)
歩行特性評価システムおよび軌跡生成方法
【課題】 歩行が困難な患者などにおける種々の3次元歩行特性を、どこでも無拘束で長時間測定して導出することができ、医師などの診断に必要な情報を十分に提示することのできる歩行特性評価システムを提供すること。
【解決手段】 歩行特性評価システム1は、一または複数の身体装着型センサ2、携帯型データ記録装置3および解析装置4からなる。身体装着型センサ2としては足の加速度および角速度を測定可能、かつ、少なくとも足爪先装着用のセンサを備え、携帯型データ記録装置3は身体装着型センサ2によって測定されたデータを記録し、解析装置4はそのデータを演算処理して一歩ごとの足爪先の3次元軌跡を生成可能なように形成された構成である。
(もっと読む)
骨密度計測装置
【課題】光を用いる骨密度の計測をより確実に行うことができる骨密度計測装置を提供する。
【解決手段】光照射部21は、生体表面の内で皮下組織の薄い足裏の踵Kに光を照射するように構成され、受光部22は、生体内部を伝播し、その反射光を受光するように構成され、受光した光に応じて踵Kの骨密度の計測がなされるようになっている。
(もっと読む)
皮下脂肪厚測定装置
【課題】測定部位を特定でき、測定部位ごとに測定開始ボタンを確認し選択して押圧操作する必要のない皮下脂肪厚測定装置の提供を目的とする。
【解決手段】発光部11と、第1受光部12Aと、第2受光部12Bと、設定部位判定手段を有する測定部位特定手段とを備える。設定部位判定手段は、第1受光部によって得られた第1受光量データと第2受光部により得られた第2受光量データと対比し、第1受光量が第2受光量よりも多い場合に、測定部位が太もも又は腕であるとの判定を行い、多くない場合に、測定部位が腹部であるとの判定を行う。
(もっと読む)
足型分類装置
【課題】被計測者の歩行に関する運動能力を容易に判断する。
【解決手段】土踏まず検出部144が、圧力分布センサ11における被計測者の足裏と接触する接触領域69から被計測者の足裏に係る土踏まずの状態を示すパラメータを検出する。当該パラメータに基づいて、足首傾斜状態検出部145が、被計測者の足首関節の傾斜状態を検出し、足裏湾曲状態検出部143が、被計測者の足裏の湾曲状態を検出する。分類部146が、足首傾斜状態検出部145及び足裏湾曲状態検出部143の検出結果に基づいて、被計測者の足型を、歩行に関する運動能力の指標となる、扁平型、回内足型、外側荷重足型、回外足型、凹足型、土踏まず変形足型及び正常な足型に分類する。
(もっと読む)
位置合わせ装置
【課題】検査台の計測基準座標の計測原点と立ち位置の中心である足型中心点とを正確かつ容易に一致させることのできる位置合わせ装置を提供する。
【解決手段】被検者が乗る検査板11と、検査板11上に作用する複数箇所の荷重を計測する荷重計測手段(ロードセル12)と、を備えた位置合わせ装置(重心動揺計100)は、被検者の踵から爪先までの足長を計測する足長計測手段(足長計測スケール41)と、足長計測手段によって計測した足長計測値に基づいて、検査板11の中心である計測原点13と、被検者の足型中心点16とを位置合わせする位置合わせ手段(原点中心立位スケール42)と、を備える。
(もっと読む)
膝の動的アライメント測定器具
【課題】従来、下肢の膝とつま先が同方向を向いているニュートラルポジションの動的アライメントは、人の目視観察により行っていましたが、従来の目視観察は観察者の経験技術などにより動的アライメントの評価基準が曖昧で説得力に問題がありました。
【解決手段】下肢のアライメントは、膝とつま先が同方向を向いていることがアライメント上重要なので、大腿骨頭部と足の第二足指部をむすぶ線に紐で実際の線を作り基準線として、この紐を軸にして膝関節の屈曲動作で膝の向きに対して膝面上で転がり回動するマーカーを設けて、当該マーカーの回転角度を読んで下肢の動的アライメントを測定する。
(もっと読む)
筋肉動の検出方法および筋肉動検出装置
【課題】 被検者に負担をかけることなく、簡便かつ正確に筋肉の動きを検出することのできる筋肉動の検出方法、および筋肉動検出装置を提供する。
【解決手段】 弾性変形に伴い電気抵抗または電圧が変化するセンサ本体20と、センサ本体20に接続され電気抵抗または電圧を出力可能な電極21a、21bと、を備える筋肉センサ1を、被検者の体90の表面に配置して、被検者の体90の動きに伴い弾性変形するセンサ本体20の電気抵抗または電圧の経時変化に基づいて、被検者の筋肉の動きを検出する。また、筋肉動検出装置1を、センサ本体20と、センサ本体20に接続される電極21a、21bと、センサ本体20に電流を供給するための電源40と、センサ本体20からの出力を処理する演算部41と、を有する制御回路部4と、を備えて構成する。
(もっと読む)
カメラアングル調整装置
【課題】歩行動作分析のためのカメラを毎回同じアングルに容易に据えられるようにする。
【解決手段】スタジオ5の床面8に、歩行路9の中心軸線9aと平行に基準マーカ2および左右マーカ3を形成し、三脚6に搭載されたカメラ7のアングル調整には、投光器1および校正治具4を用いる。校正治具4は、基準点41からx,y,zの各方向に延びる棒状体43,44,42を組合わせて構成され、基準点41および棒状体42,43の遊端部および後方の連結部材47に反射部材51,52,53,54をそれぞれ有する。一方、カメラ7上の投光器1は、レーザ墨出し器の要領で、上下方向に面状の光72を放射する。エクササイズ等での使用で撤去されていたカメラ7を、歩行状態の解析のために設置する際は、基準マーカ2上に反射部材51が、左右マーカ3上に反射部材53が位置するように校正治具4が設置され、反射部材51,52,54に光72が当るように調整する。
(もっと読む)
運動状態測定装置及び生体測定装置
【課題】運動する利用者の生体インピーダンスを算出し、その生体インピーダンスの変化を利用することにより、正確かつ簡便に、利用者の運動状態をリアルタイムに測定する運動状態測定装置及び生体測定装置を提供する。
【解決手段】利用者に接触して電流を供給する通電電極と、通電電極から供給されて前記利用者の体内を流れる電流の電圧を取得する測定電極と、通電電極から供給される電流値、及び、測定電極において測定される電圧値から利用者の生体インピーダンスを算出する生体インピーダンス算出部と、所定状態の利用者の第1生体インピーダンス値、及び、所定状態とは別の運動状態の前記利用者の第2生体インピーダンス値に基づいて、運動状態を判別する状態判別部と、を有する。
(もっと読む)
歩行動作分析装置
【課題】加速度を検出する軸方向を増やすことなく、歩数や歩行距離、歩行速度、歩幅などの歩行パラメータと同時に、歩行動作の左右バランスを判定する。
【解決手段】1軸加速度センサであるセンサ部1は、身体に装着されて歩行に起因する身体部位の左右軸方向以外の単一軸方向の加速度を検出する。演算処理部3は、センサ部1の検出結果から生成される加速度波形の特徴量(極大値、極小値など)を抽出し、歩行周期における左右脚の動作にそれぞれ対応した立脚期の加速度波形の特徴量を用いて、歩行動作の左右バランスが正常であるか否かを判定する。
(もっと読む)
膝関節の安定度を測定する装置
本発明は、膝関節の安定度を測定する装置に関する。装置は、膝関節11に関連する下腿12に締結装置16を介して取り付けることができる測定センサ14を備える。測定センサ14は、下腿12の運動における少なくとも1つの方向zの加速を測定するように設計される。さらに、測定センサ14の測定値を処理し、処理された測定値から膝関節11の安定度を推計するために処理装置18が設置される。 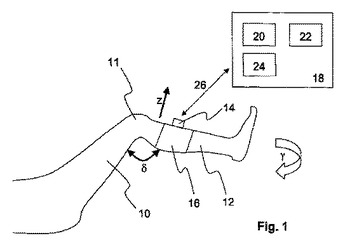 (もっと読む)
(もっと読む)
運動低下状態及び/又は運動亢進状態の検出
本発明は、人の運動状態を決定する自動化方法に関する。本方法は、人の四肢に装着された加速度計から加速度計データを取得し、加速度計データを処理して運動状態に対する測定値を決定する。本発明はさらに、人の運動状態を決定する装置に関する。本装置は、人の四肢に装着された加速度計から得られるデータを処理し、そのデータから運動状態に対する測定値を決定するように構成されたプロセッサを備える。本方法及びシステムにおいて、運動状態は、運動緩慢、ジスキネジア及び運動亢進のうちの少なくとも1つである。 (もっと読む)
101 - 120 / 280
[ Back to top ]