
Fターム[4C082AJ10]の内容
放射線治療装置 (15,937) | 放射の位置決め・確認・モニタリング (834) | スケール、マーカの使用 (42)
Fターム[4C082AJ10]に分類される特許
21 - 40 / 42
フィデューシャルマーカの配置
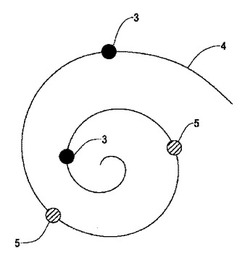
【課題】次の段階からなる2つあるいはそれ以上のフィデューシャルマーカ(3)の予期する位置(5)を決定する方法:ワークピース(2)に関して、原点からの軌跡(4)の角度変位に関して非反復の様式で変化する原点からの半径をもつ軌跡を決める段階;そして予期する位置が決まった軌跡に沿った点に実質的にワークピースに関して場所付けられるようにそれぞれのフィデューシャルマーカの2つあるいはそれ以上の予期する位置を選択する段階。 (もっと読む)
放射線治療装置

【課題】放射線治療装置において、治療精度を向上すると共に、患者の放射線被爆量を抑える。
【解決手段】放射線治療装置10は、治療用放射線を照射する照射ノズル12と、患者13を乗せて照射ノズル12から照射される治療用放射線15の照射位置にその患者13の患部を位置決めする治療台14と、診断用放射線を照射して患部周辺を撮影する画像取得装置18と、患者の体表面を撮影するテレビカメラ22と、画像取得装置18により撮影した透視画像とテレビカメラ22により経時的に撮影したカメラ画像とを用いて、患部を含んだ患部周辺の合成透視画像を経時的に作成する画像処理装置と、画像処理装置で作成した合成透視画像を表示するディスプレイとを備える。
(もっと読む)
患者モニタ
患者の動きまたは異常な呼吸を検出する患者モニタが開示される。患者(20)の画像が立体視カメラ(10)によって取得される。それらの画像は次いで3D位置決定モジュール(25)によって処理される。3D位置決定モジュールは、患者の少なくとも一部分の諸位置を示す諸測定値を決定する。得られた測定値は次いでモデル生成モジュール(32)に渡される。モデル生成モジュールは、呼吸サイクルの間の患者の前記少なくとも一部分の位置の変動の呼吸モデルを生成する。その後は、異常な呼吸または患者の動きは、立体視カメラ(10)によって得られるさらなる画像を処理して患者の少なくとも一部分の位置を示すさらなる諸測定値を決定することによって検出できる。その際、これらの測定値は、比較モジュール(36)によって、記憶されている呼吸モデル(34)と比較される。異常な呼吸または患者の動きが検出されると、比較モジュール(36)は信号を治療装置(16)に送って正常な呼吸が再開されるまで治療を中断させるか、あるいは信号を機械的な台(18)に送って検出された動きに対処するよう患者の位置を直させる。 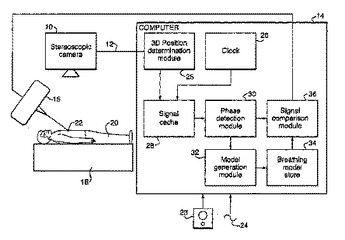 (もっと読む)
(もっと読む)
レーザポインタ装置及びそのシステム並びにキャリブレーション方法
【目的】 レーザ投光ユニットの照準を自動的に定位置に高精度で合わせ込むことの可能なことを課題とする。
【構成】 放射線医療装置を収容する室内のある面に設けられてクロスラインレーザを射出するレーザ投光ユニット61と、 前記ある面の対向面に設けられてレーザ投光ユニットからのクロスラインレーザを受光する光センサユニット62と、光センサユニットの検出出力に基づきレーザ投光ユニットからのクロスラインレーザが該光センサユニット上の所定位置に照射されるようにレーザ投光ユニットのフィードバック制御を行う制御手段とを備える。
(もっと読む)
放射線治療装置、放射線治療装置の制御方法
【課題】本発明の目的は、患部に対して適正量のX線を照射し、且つ患部周辺健全組織へのX線照射量の低減を図るために、ガントリに取り付けられた治療用X線発生源から照射されるX線の照射軸を、任意のガントリ走行角度において、常に照射対象患部の位置されるアイソセンタに指向することのできる放射線治療装置、放射線治療装置の制御方法を提供することである。
【解決手段】本発明の放射線治療装置では、治療用X線発生源が、X線軸を指向制御するジンバル機構を介してガントリに支持される。そして、アイソセンタの同定を行うためにアイソセンタ想定位置にマーカ部材を配置する。水平方向のレーザ光を指標としてマーカ部材の高さ方向の位置が決められ、アイソセンタを含む水平面が決定する。任意のガントリ走行角度において、複数の旋回角度におけるマーカ部材のX線画像を取得し、その中心位置を水平面内におけるアイソセンタ想定位置とする。
(もっと読む)
トモシンセシス技術を用いた患者の位置決め
対象物の位置を決定するためのシステムは、X線源および撮像子を有する撮像システムと、該撮像システムを用いて対象物のトモシンセシス画像を取得し該トモシンセシス画像を用いて対象物の位置を決定するように構成されたプロセッサとを有する。対象物の位置を決定するための方法は、対象物のトモシンセシス画像を取得するステップと、該トモシンセシス画像を用いて放射線機器に対する対象物の座標を決定するステップとを有する。対象物の位置を決定する方法は、対象物の画像を取得するステップと、該対象物の基準画像を取得するステップと、該基準画像を該画像と比較するステップと、少なくとも部分的にその比較結果に基づいて、該対象物の座標を決定するステップとを有し、該基準画像は、該画像の平面に平行な平面を有する。 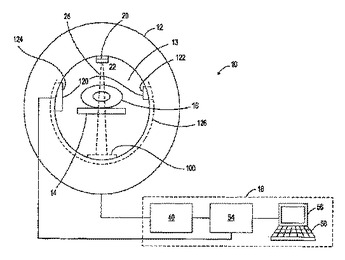 (もっと読む)
(もっと読む)
放射線治療装置制御装置および放射線照射方法
【課題】被検体の一部分をより確実に照射し、かつ、その被検体に照射される放射線の線量をより低減させる治療用放射線照射装置を提供する。
【解決手段】被検体の一部分に治療用放射線を照射する治療用放射線照射装置と、被検体を透過する放射線を用いないで被検体の運動を検出する運動検出装置と、被検体に対して治療用放射線照射装置を移動させる駆動装置とを備えている放射線治療装置を制御する放射線治療装置制御装置2は、運動集合を位置集合に対応付ける患部位置データベース51と、運動を運動検出装置4から収集する運動収集部61と、位置集合のうちの運動に対応する位置に治療用放射線が照射されるように治療用放射線照射装置を移動させる照射位置制御部62とを備えている。
(もっと読む)
放射線治療装置制御装置および放射線照射方法
【課題】被検体の所定位置をより高精度に放射線治療装置の所定位置に合致させること。
【解決手段】治療用放射線23を放射する治療用放射線照射装置16と、治療用放射線照射装置16に固定されるイメージャ24、25、32、33と、被検体43が配置されるカウチ41を駆動する駆動装置11、15、42とを備えている放射線治療装置3を制御する放射線治療装置制御装置2であり、イメージャ16、24、25、31、32、33により撮像された参照イメージャ画像を収集する参照画像作成部56と、イメージャ24、25、32、33により被検体43の撮像イメージャ画像を撮像する透過画像撮像部と、被検体43の特徴点が撮像イメージャ画像に映し出される位置と参照イメージャ画像に特徴点が映し出される位置とに基づいて治療用放射線照射装置16に対するカウチ41の相対位置が適正かどうかを判別する患部位置制御部とを備えている。
(もっと読む)
X線位置決め装置
【課題】X線治療に先立ってX線の照射方向や照射野をシミュレーションして決定するX線位置決め装置に関し、被検体上に患部の範囲及び位置を視認できるマークを簡便に形成できるようにして作業効率を向上させる技術を提供する。
【解決手段】被検体へX線を照射するX線源21と、前記被検体を透過したX線から被検体内画像を形成するイメージ・インテンシファイア3と、前記X線源21と前記イメージ・インテンシファイア3との間に介在して前記被検体内画像に線影を投影するワイヤコリメータ24と、前記ワイヤコリメータの位置を検出するワイヤコリメータ位置検出手段と、被検体の体表面位置を検出する体表面位置検出手段と、X線の焦点と前記ワイヤコリメータと前記被検体の体表面との位置関係に基づき、前記被検体の体表面に前記ワイヤコリメータの線影が投影された場合の投影像をマーキングする体表マーキング手段と、を備える。
(もっと読む)
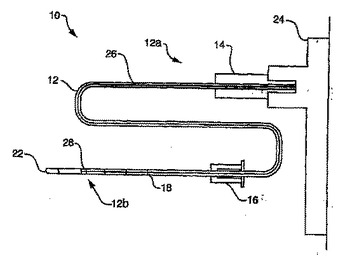
安全連結式小線源治療用カテーテル
放射性線源用の閉鎖送達経路を作製するためのデバイスおよび方法を提供する。1つの局面では、閉鎖送達経路の形成が達成されるように、デバイスは、後充填装置(afterloader)と噛み合わせるのに適合したその管の近位端上のコネクタと、処置用アプリケータ内に挿入されうる閉鎖遠位端部分とを有する管でありうる。管はまた、処置用アプリケータに取り外し可能に接続させるための、その近位端と遠位端との間に配置されたアプリケータ用コネクタを含んでもよい。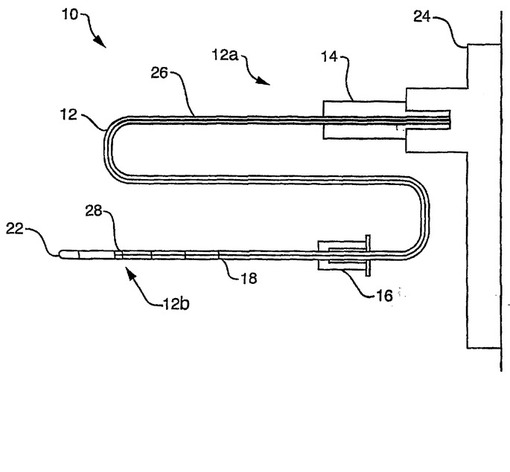
 (もっと読む)
(もっと読む)
放射線治療を施すための方法および装置
本発明は放射線治療を施すための方法および装置に関する。この方法は、中央軸線ビーム(14)に対する処置領域(30)における患者の位置及び/又は向きを精密に決定するべくマーカーおよび悪いマーカーを検出することを包含する。この装置はロボット(10)を有し、後者は処置すべき患者を実際のマーカーの認識に対して位置決めし及び/又は向き決めするべく制御される。利用分野は放射線治療である。 (もっと読む)
放射線治療の品質保証とオンライン検査のための装置と方法
放射装置により標的に供給される放射線をモニタする放射線モニタと方法について説明する。放射線モニタは、一組もしくは縦横配列されたピクセルイオンチャンバを含む。ピクセルイオンチャンバは、望ましくは、上端の電極と、中間層を通して上端の電極と接続する分割電極とから構成される。複数のピクセルイオンチャンバは、上端の電極から分割電極にまで広がる中間層の内部に形成される。中間層は、粘着性ドットの配列によって上端の電極と分割電極にまで積層されるが、ここで、粘着性ドットは適切な大きさにされ中間層に置かれることにより、イオンチャンバのための通気用スリットまたは通路を提供する。 (もっと読む)
埋込可能無線マーカーの位置を発見するための装置
身体組織に埋め込むことができる励起可能無線ターゲット(206)を感知するための装置(100)。装置(100)は、ほぼ共通の平面に配置された複数の電磁場センサ(302)と、センサ(302)に結合した複数の感知信号出力経路(306)とを含む。センサ(302)及び信号出力経路(306)の各々は、マーカー(206)によってもたらされた電磁場の少なくとも一部分を表す出力信号を供給するように構成される。 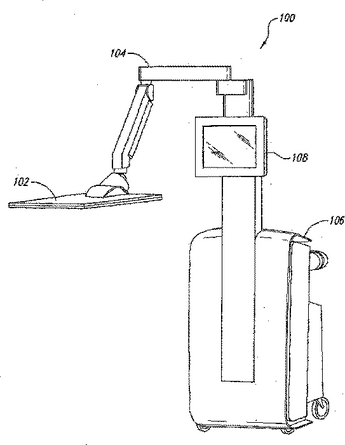 (もっと読む)
(もっと読む)
放射線治療用の頭頸部固定具、それを作製するためのテンプレート、シール及びシート材料、放射線治療用の頭頸部固定具の作製方法
【課題】 頭頸部の放射線治療を受ける患者が特に幼い子供である場合に、患者の精神的苦痛を軽減して放射線治療を円滑に進めることができるようにした放射線治療用の頭頸部固定具を提供する。
【解決手段】 放射線治療用の頭頸部固定具1には、放射線治療を受ける子供の精神的苦痛を軽減するように、顔面を覆う部分にパンダの顔模様が表されている。頭頸部固定具1は、シート材料3を用いて作製する。即ち、加温して軟化させたシート材料3を頭部及び顔面等の患部に被せ、患部の凹凸に密着するように伸長させる。温度が下がると患部の凹凸に合わせてシート材料3が硬化するので、患部から取り外し、周縁の不要な部分を切除する。病巣に正確に放射線を照射するために、成形したシート材料3にマーキングを行う。マーキング後に、テンプレート6と黒色の油性インク等のペン7を用いて成形したシート材料3にパンダの顔模様を描く。
(もっと読む)
関節付き支持アセンブリ
【課題】
【解決手段】関節付き支持アセンブリは、ステップ式ヘッド締め付けロック(12)と、ステップ式ヘッド締め付けロックに結合されたロック可能支持アセンブリであって、静止物体に選択的に解除可能に結合できることで、静止物体の平面に対して、ある位置に向かって装置を複数平面に直交するように操作することを可能にするロック可能支持アセンブリ(14)と、ロック可能支持アセンブリに結合された複数のジョイントであって、複数平面に直交する動きを可能にするジョイント(16a、16b、18a、18b、29a、29b)と、を備える。 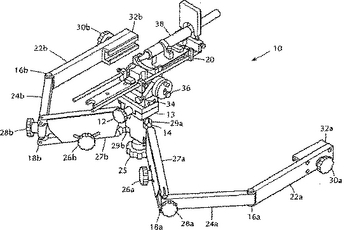 (もっと読む)
(もっと読む)
放射線治療装置の幾何学的形状を分析するためのシステム、ソフトウェア、及び関連する方法
放射線治療装置31の幾何学的形状を分析するためのシステム30、ソフトウェア71、及び方法が提供される。システム30は、回転式アセンブリ51、53、55の予め選択された部分のマーキングするための、回転式アセンブリ51、53、55及び1つ又は複数の追跡可能な本体33を有する装置31を備える。システム30は、追跡可能な参照固定部35も含み、一定の向きの追跡可能な本体36を備えることもできる。デターミナー39は、追跡可能な本体33、追跡可能な基準固定部35及び一定の向きの追跡可能な本体36の位置及び/又は向きを特定する。デターミナー39は、オペレータによって使用される座標系を分析するために装置31の幾何学的形状を特定する。デターミナー39は、装置の幾何学的形状を分析するためにメモリ69に記憶されたメモリ69及び幾何学的形状分析ソフトウェア71を有することができる。 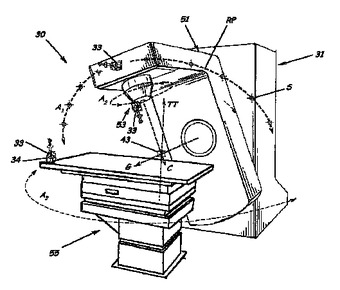 (もっと読む)
(もっと読む)
骨疾患のための治療因子を送達するためのシステムおよび方法
骨格支持構造体の内部領域に治療因子を輸送するための、種々のシステムおよび方法が提供される。1つの実施形態において、第一の細長部材、第二の細長部材、および膨張可能構造体が、骨格支持構造体の内部領域への非軸方向アクセスを提供する。第二の細長部材は、第一の細長部材の管腔を通して骨格支持構造体の内部領域へと、放射線源を輸送するように構成されている。これらの方法およびデバイスによって、放射線および治療の危険な副作用への周囲の組織の曝露を最小にしながら、治療因子を、骨格支持構造体(例えば、椎体)の内部容量に直接堆積させることを可能にする。 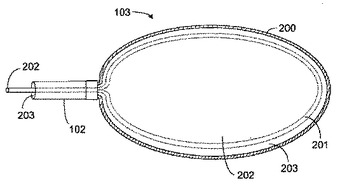 (もっと読む)
(もっと読む)
放射線治療及び他の医療用途におけるターゲットの実時間追跡のためのシステム及び方法
放射線治療及び他の用途のための実時間でターゲットを追跡するシステムと方法が開示される。1つの実施形態において、方法は、患者体内にターゲットに関連する位置に埋め込まれたマーカーの位置情報を時刻tnにおいて収集するステップと、時刻tnにおいて収集された位置情報に基づいてターゲットの位置を示す客観的出力を供給するステップを含む。客観的出力は、位置情報が収集された時刻tnから1ミリ秒乃至2秒以内に、メモリ・デバイス、ユーザ・インタフェース、及び/又は放射線照射装置に供給される。本方法のこの実施形態は、少なくとも治療処置の一部の間に、10−200msの周期で客観的出力を供給するステップをさらに含むことができる。例えば、本方法は、イオン化放射線のビームを発生して、該ビームをマシーン・アイソセンターに向けるステップと、患者をイオン化放射線ビームで照射しながら、10−200ミリ秒ごとに、収集手続きと供給手続きを連続的に繰り返すステップをさらに含むことができる。 (もっと読む)
患者内のターゲットを治療するための統合放射線治療システム及び方法
【課題】治療の効率及び効力を高めるために患者評価、治療計画、シミュレーション、設定、治療、及び/又は検証の手順を統合するシステム及び方法を提供する。
【解決手段】統合放射線治療方法は、位置測定モダリティを用いて患者内に位置決めされたマーカの位置を定期的に測定することにより患者内のターゲットのパラメータに関する第1の客観的ターゲットデータを取得する段階を含む。この方法は、定期的にマーカの位置を測定することによりターゲットのパラメータに関する第2の客観的ターゲットデータを取得する段階で継続される。第1の客観的ターゲットデータは、患者を治療するための電離放射線ビームを発生させる放射線送出装置を収容する第2のエリアから離れた第1のエリアで取得することができる。位置測定モダリティは、第1及び第2のエリアの両方で同じとすることができる。他の実施形態では、第1の客観的ターゲットデータは、マーカを識別するために第1のエネルギタイプを使用する第1の位置測定モダリティを用いて取得することができ、第2の客観的ターゲットデータは、マーカを識別するために第1のエネルギタイプとは異なる第2のエネルギタイプを使用する第2の位置測定モダリティを用いて取得することができる。
(もっと読む)
軟組織ボリュームを識別するための細長いマーカー
本発明は、哺乳類の体内の器官、腫瘍または腫瘍床の位置を特定するための侵入型マーカーに係わり、マーカーは基端、先端及び連続的な中間部分を有し、その中間部分の少なくとも一部が少なくとも1つの画像技術下で視認可能であり、器官、腫瘍または腫瘍床の動き及び形状の変化に追随するような可撓性を有する。 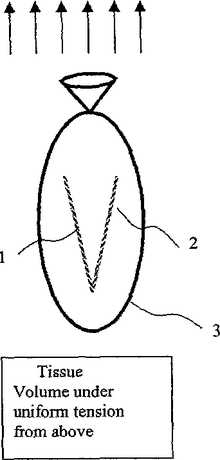 (もっと読む)
(もっと読む)
21 - 40 / 42
[ Back to top ]