
Fターム[4C082AP12]の内容
放射線治療装置 (15,937) | 検出 (722) | 装置(の状態)の検出 (186) | 位置 (120)
Fターム[4C082AP12]の下位に属するFターム
架台の回転角度 (29)
Fターム[4C082AP12]に分類される特許
21 - 40 / 91
粒子線治療装置のビーム位置ずれ検出装置
【課題】信頼性の高いビームの位置ずれ検出を行うと共に、一部のビーム位置モニタが故障でもビームの位置ずれ検出を可能とする。
【解決手段】シンクロトロンから複数の照射室にビームを導入する複数の照射コース毎に、それぞれビームの位置ずれを検出するビーム位置モニタを設置する粒子線治療装置のビーム位置ずれ検出装置であって、各照射コース毎にビーム位置モニタを複数個設置し、各照射コースの各ビーム位置モニタ毎にビームの位置ずれを測定しビームの位置ずれを判定し、各照射コースの複数のビーム位置モニタの判定結果を基に該当照射コースのビームの位置ずれを判定する。
(もっと読む)
治療用放射線照射装置動作制御装置および治療用放射線照射装置動作制御方法

【課題】治療用放射線の照射位置を駆動する駆動装置をより高精度に制御すること。
【解決手段】位置検出センサにより測定された位置センサ値を目標位置から減算した位置偏差100に基づいて補正前操作量124を算出する操作量算出部121と、位置偏差100の絶対値に関して単純に減少する係数125を算出する係数演算部122と、補正前操作量124に係数125を乗算して補正後操作量101を算出する乗算器123とを備えている。駆動装置は、補正後操作量101に基づいて、治療用放射線を出射する放射線照射装置が目標位置に配置されるように、制御される。位置偏差100が大きいときに補正後操作量101が大きくなり過ぎないために、放射線照射装置をより安定して駆動することができ、さらに、補正前操作量124に基づいて駆動装置を制御する制御装置を改造することにより、より容易に生産することができる。
(もっと読む)
放射線ビーム分析器及び放射線ビーム分析方法
サイバーナイフ(登録商標)によって生成される放射線の分布及び強度を測定する放射線ビーム分析器である。当該分析器は、センサが配されている小さな水タンクを使用する。センサと放射線源との間の距離は変化しない。水タンクがセンサに対して上昇及び下降させられて、患者の体内の疾患の位置がシュミレーションされる。このタンクの移動は、サイバーナイフ(登録商標)からの放射線が、患者内の疾患の適切な治療のために適切にキャリブレーション及び調整されることを可能にする。第2の実施形態において、放射線ビーム分析器は、放射線源によって生成された放射線の分布及び強度を測定する。分析器は、センサまたは検出器が配される小さな水タンクを使用する。センサと放射線源との間の距離は変化しない。SAD(線源と軸との距離)を一定に維持する2つの方法が存在する。第1の方法は、検出器を保持するホルダを用いて検出器の位置を固定し、小さな水タンクを上昇または下降させる方法である。第2の方法は、上昇及び下降機構を用いて検出器を上方または下方に一方の方向に移動させ、同時に、他の上昇及び下降機構を用いて小さな水タンクを逆の方向に移動させる方法である。第2の方法もSADを一定に維持する。これらの方法は、放射線源に対して検出器を位置決めして、患者の体内の疾患の位置をシミュレートする。このタンクの移動は、放射線ビーム源が、適切にアイソセントリックに測定されることを可能にする。  (もっと読む)
(もっと読む)
放射線療法デリバリ用の運動適応最適化システムおよび方法
放射線療法治療のデリバリを最適化する方法。この方法は、患者の解剖学的および生理的な変化(例えば、呼吸性運動や、その他の運動など)や、機械パラメータの変化(例えば、ビーム出力係数、治療台エラー、リーフ・エラーなど)などのような様々な因子を考慮するように、リアルタイムで治療デリバリを最適化する。 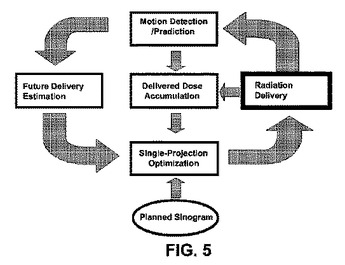 (もっと読む)
(もっと読む)
マルチリーフコリメータおよび放射線治療装置
【課題】 放射線治療において、リーフの検出機構が簡素化、小型化され、リーフの検出精度が向上する放射線治療装置を提供することを目的とする。
【解決手段】 位置検出機構40は、発光素子41からのレーザー光等の光を、シリンドリカルレンズ(円柱レンズ)42を通して線状の公選へと変化させて、リーフブロック27の端面全体へ照射する。リーフブロック27の端面全体へ照射されたレーザー光の反射光は、光学レンズを通してCCDやCMOS等の撮像素子43で受ける。撮像素子43の画素はリーフ幅より小さいものであり、撮像素子43上に端面位置が図4の(c)のように描出され、パターン画像を画像処理により解析して、リーフブロック27の変位、つまり絶対位置を算出する。
(もっと読む)
患者を放射線に対して位置決めするためのデバイス
本発明は、患者を放射線に対して位置決めするための多関節ロボットデバイスであって:
水平移動のための少なくとも1本の線状レールと;
前記線状レールに対して並進運動が可能であり且つ前記線状レールに対して垂直な回転軸を中心にして旋回が可能であるコネクタと;
コネクタへと接続されているロボットアームであって、患者ホルダへ接続している交差回転軸を有するリストジョイントを備えている前記ロボットアームと;
を備えている、前記デバイスに関する。 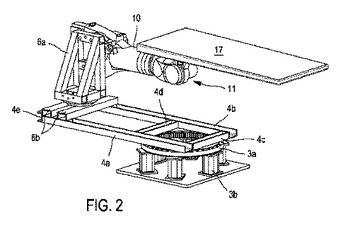 (もっと読む)
(もっと読む)
照合装置および放射線治療システム
【課題】 放射線治療において、治療計画時に設定された被検体の治療部位へ、正確に放射線を照射することを目的とする。
【解決手段】 被検体Pが寝台10に固定具Fで固定されている状態をカメラ23で撮影し、治療計画と関連させて保存する。治療計画に関連付けられている固定具ID33と患者固定写真ID34から、被検体Pの固定されている固定具Fと載置されている写真をモニタ22に表示し、表示された写真を参考にしながら被検体Pを寝台10へ載置する。
(もっと読む)
粒子線治療装置
【課題】多葉コリメータを用いた粒子線治療装置において、多葉コリメータのリーフ開口部形状を容易に精度良く確認することが可能な粒子線治療装置を得る。
【解決手段】粒子線照射方向に対して多葉コリメータ3の上流側に第一照明手段5と第二照明手段6及び撮影手段7を設け、回転角度検出手段10により検出された多葉コリメータ3の回転角度情報をもとに2つの照明手段の入り切りを照明制御手段9により制御することにより、リーフ3aによる照明光の強い乱反射を抑制できる。また、患者コンペンセータ4と多葉コリメータ3の間に患者コンペンセータ遮蔽手段11を設け、多葉コリメータ3の撮影画像に患者コンペンセータ4が写るのを抑制し、照射ノズル100外部からの光の侵入を抑制し、照明手段5、6からの照明光の反射を抑制したので、多葉コリメータ3の鮮明な撮影画像が取得できリーフ開口部形状を容易に精度良く確認できる。
(もっと読む)
粒子線治療装置
【課題】粒子線照射部や治療用ベッドなどの被駆動部の干渉を容易に監視できる粒子線治療装置を提供する。
【解決手段】回転ガントリ1と共に回転駆動され、患者7の患部に粒子線を照射する粒子線照射部2と、患者7を搭載し、患者7の病巣が粒子線照射部2照射される粒子線のアイソセンタ6に合致するように駆動される治療用ベッド3と、単一または複数の球によって粒子線照射部2を覆い包む第一の球モデル9を生成する第一の球モデル生成手段と、単一または複数の球によって治療用ベッドを覆い包む第二の球モデルを生成する第二の球モデル生成手段と、第一の球モデルと第二の球モデルの干渉を監視する球モデル干渉監視手段とを備える。
(もっと読む)
誘導放射線療法システム
【課題】体の中の腫瘍のようなターゲットの位置を正確に確認し、追跡するためのシステム及び方法の提供。
【解決手段】ターゲットの中に又は近くに位置決め可能な信号を生じさせる外部例示ビーコンと、そのビーコンを遠隔操作により励磁させて、認識可能な信号を生じさせる外部励磁源と、互いに既知の幾何学的形体で間隔を隔てられた複数のセンサとを有する。コンピュータが、センサーに接続され、ビーコンの測定値を使用して、ターゲット内部のターゲットアイソセンタを識別するように形成される。コンピュータは、ターゲットアイソセンタの位置とマシンアイソセンタの位置とを比較する。コンピュータはまた、放射線治療前及びその間、ターゲットアイソセンタがマシンアイソセンタと一致するように、患者及び患者の支持装置の移動を制御する。
(もっと読む)
ブラキセラピー方法及びシステム
目標領域200に関するブラキセラピーシステムは、中空の複数のチャネル110を有し、目標領域に植え込まれるアプリケータ100と、追跡装置175と、追跡装置によって受信される信号を生成する追跡信号発生器180と、プロセッサ550と、を有する。追跡装置は、複数のチャネルの少なくとも一部を通って前進され後退されるサイズ及び形状を有することができる。プロセッサは、追跡装置の移動に基づいて、複数のチャネルの1又は複数の位置を決定することができる。プロセッサは、追跡装置からの位置測定情報に基づいて、画像における複数のチャネルのロケーションを決定することができる。 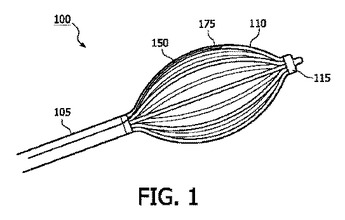 (もっと読む)
(もっと読む)
荷電粒子癌治療システムと併用する荷電粒子ビーム入射方法及び装置
本発明は、癌腫瘍の多軸荷電粒子照射治療と併用される荷電粒子ビーム入射方法及び装置を有する。陰イオン源は、陰イオン・ビーム源、真空システム、イオン・ビーム・フォーカス・レンズ、及び又は2連型加速器を備えている。陰イオン源は、陰イオン・ビームをフォーカスするために電場線を使用する。陰イオン源プラズマ室は磁性材料を有し、その磁性材料は高温プラズマ室及び低温プラズマ領域の間に磁場障壁を設ける。入射システム真空システム及びシンクロトロン真空システムは変換箔によって分離され、その変換箔において陰イオンが陽イオンに変換される。その箔は、入射システム真空室に高めの部分圧力及びシンクロトロン真空システムに低めの圧力を用意する真空管の端に貼付される。 (もっと読む)
磁気ガイド装置および放射線治療装置
【課題】着磁媒体の着磁パターンを離れた距離にある磁気センサーで検出すること。
【解決手段】軟磁性粒子を含む平坦な軟磁性層と軟磁性粒子を含まない平坦な非磁性層を交互に積層し、積層露出断面を磁気センサー48への取り付け面およびリーフとの接触面に適合する形状に切断・加工して磁気ガイド90を作成する。そして、磁気ガイド90を磁気テープ46と磁気センサー48との間に配置する。磁気ガイド90には、柱状の軟磁性領域と非磁性体領域から構成される材料を用いることもできる。
(もっと読む)
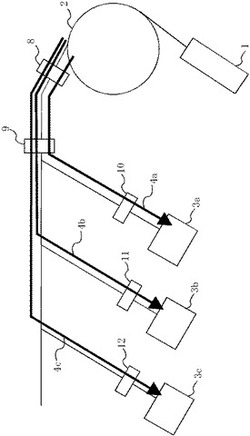
荷電粒子線照射装置
【課題】ワブラー法及びスキャニング法の双方によって荷電粒子線を照射することができる荷電粒子線照射装置を提供する。
【解決手段】荷電粒子線照射装置1は、荷電粒子線Rを走査するための走査電磁石3a,3bと、荷電粒子線Rをワブラー法で照射するためのワブラー照射手段5と、荷電粒子線Rをスキャニング法で照射するためのスキャニング照射手段6と、ワブラー照射手段5及びスキャニング照射手段6を制御する制御装置7と、を備えている。荷電粒子線照射装置1では、制御装置7によって、ワブラー照射手段5又はスキャニング照射手段6の何れか一方を作動させると共に、何れか他方を荷電粒子線Rの照射が妨げられないように退避状態とする。よって、ワブラー法による照射及びスキャニング法による照射のそれぞれを、その一方が他方に悪影響を及ぼすことなく実現することができる。
(もっと読む)
放射線治療装置、及びコリメータ装置
【課題】ギア駆動によってリーフブロックを移動させることで照射野を絞る放射線治療装置及び当該装置に備えられるコリメータ装置に関し、ギアの経時的な摩耗によってもバックラッシの拡大を防止することができる技術を提供する。
【解決手段】リーフブロック23A又は23Bに刻設されたラックギア25cにピニオンギア25bを噛合わせ、弾性体27によってピニオンギア25bをその背後からラックギア25cに向けて押圧するようにした。例えば、ピニオンギア25bをギアードモータ25aの前面に組み込み、弾性体27をギアードモータ25aの背面に取り付け、ギアードモータ25aごとピニオンギア25bを押圧する。
(もっと読む)
中性子線照射装置
【課題】コリメータの中性子取出口と照射目標との位置合わせを容易に行い、照射精度の向上を図ることを可能にした中性子線照射装置を提供する。
【解決手段】 中性子線照射装置1は、患者P体内の患部Tに中性子線を照射する装置であり、患者Pを載置する載置台2と、中性子を減速する減速装置3と、中性子を収束するコリメータ4とを備える。コリメータ4は、コリメータホルダ10を介してカバー11に固定され、載置台2とコリメータ4とは、中性子の取出方向Fに沿って減速装置3に対して移動可能に設けられている。中性子線照射装置1は、載置台2及びコリメータ4が減速装置3から離間した後、コリメータ4と減速装置3との間から患部TのX線画像を撮像するCR撮像部22を更に備える。
(もっと読む)
放射線治療装置制御装置および放射線照射方法
【課題】照射部位の位置を測定する頻度を低減し、かつ、その照射部位の位置を高精度に測定すること。
【解決手段】被検体の運動を示している運動情報を第1センサから収集する被検体運動収集部52と、第2センサがその被検体の照射部位の位置を測定する時間間隔をその運動情報に基づいて変更するセンサ制御部55と、その照射部位に照射される治療用放射線が照射部位の位置に基づいて変化するように放射線治療装置を制御する照射制御部56とを備えている。このとき、放射線治療装置制御装置2は、被検体の運動に基づいて推測される照射部位の動きが鈍いときにその照射部位の位置を測定する頻度を低減することにより、照射部位の位置を高精度に測定しつつ、放射線治療全体での照射部位の位置を測定する頻度を低減することができる。
(もっと読む)
放射線照射の位置決め用光ビームポインティングシステム
【課題】照準中心に対する可視光ビームの位置調整を、保守作業者によらず自動的に実行することができる放射線照射の位置決め用光ビームポインティングシステムを提供する。
【解決手段】照射中心Cを挟んで対向配置されたポインタ2L,2Rがそれぞれ、照射中心を狙ってビームBL,BRを投光する投光部3L,3Rと、対向相手からのビームの受光位置に応じた検出信号DL,DRを生成する受光部4L,4Rと、狙い通りに照射中心を通過した対向相手からのビームを受光した受光部が生成すべき検出信号の値を基準値SL,SRとして予め格納した制御部7L,7Rであって、基準値と受光部が生成した検出信号の値との差が許容範囲外にあるとき、対向相手の投光角度を補正する補正信号CL,CRを生成するものと、補正信号を対向相手と伝達しあうための送信部8L,8Rおよび受信部9L,9Rと、受信した補正信号に応じて、投光角度を補正するアクチュエータ10L,10Rと、を含むシステムとした。
(もっと読む)
マルチリーフコリメータおよび放射線治療装置
【課題】第1のリーフブロック群および第2のリーフブロック群相互間の隙間形状を目標形状に正確に設定すること。
【解決手段】リーフブロック12は相手側のリーフブロック12から離間する離間方向および相手側のリーフブロック12に接近する接近方向のそれぞれに移動可能にされたものであり、リーフブロック12の円弧面14には着磁部21および着磁部22を交互に有する磁性層20が形成され、磁性層20にはMRセンサ23が非接触状態で対向配置されている。この構成の場合、複数のリーフブロックモータ19のそれぞれをMRセンサ23からの出力信号に基づいて駆動制御することで複数のリーフブロック12のそれぞれを非接触で目標位置に移動操作しているので、第1のリーフブロック群および第2のリーフブロック群相互間の隙間形状を目標形状に正確に設定することができる。
(もっと読む)
事前算出フィードフォワード制御と画像フィードバック制御とを介して細胞に対する制御を自動化し殲滅することで標的へエネルギを供給するようにしたフォトン利用の非侵襲的外科手術システム
フォトン利用の非侵襲的外科手術システムであり、MRI装置などの画像形成装置と、少なくとも2つのビーム発生器とを備えており、それらビーム発生器は、処置対象者の体内の標的にエネルギを供給するための複数本のエネルギビームを発生し、それら複数本のエネルギビームが1箇所で交差するようにしてある。このシステムは更に、複数本のエネルギビームが処置対象者の身体を透過して進行する際に発生すると予測されるビーム偏向と、予測したビーム偏向が発生したならばその結果として形成されるはずのビーム経路とを事前算出するフィードフォワード制御手段と、前記画像形成装置により収集される情報を取得して利用するフィードバック制御手段とを備えている。 (もっと読む)
21 - 40 / 91
[ Back to top ]