
Fターム[4C097TA05]の内容
補綴 (46,288) | 義肢・身体装着伸長具 (315) | 下肢;人工脚の構造 (160)
Fターム[4C097TA05]の下位に属するFターム
Fターム[4C097TA05]に分類される特許
1 - 20 / 31
下肢動作支援装置
歩行支援装置
【課題】安定的固定と装着感の両者を満足させることを目的とする。
【解決手段】締付力を変更する固定具アクチュエータを設けることにより、歩行支援装置の締付力を可変にする。そして、1歩行周期の間を動作の状態に応じて区分し、各歩行動作状態の区分毎に各装着部21〜23の締付強度を予め決めておく。そして、各センサ出力から、脚がどの区分の歩行動作状態にあるかを検出し、検出した区分対応する締付力で各装着部21〜23を締め付ける。
(もっと読む)
歩行支援装置、及び歩行支援プログラム

【課題】歩き方が異なる場合であっても、一定の負担感での歩行支援を行う。
【解決手段】1歩行周期の間における装着者の負担量として角力積(関節モーメントの時間積分値)に着目し、歩行状態によらずに装着者の1歩行周期における角力積が一定となるように各関節のアシストを行う。すなわち、基準となる歩行状態の1歩行周期における角力積から、歩行支援装置がアシストした角力積を除いた角力積を基準角力積zとし、歩行パラメータの値が変化する(歩き方が変わる)ことで角力積が増加したとしても、装着者が負担すべき角力積が基準角力積zと均しくなるようにアシスト率βを設定する。これにより歩行パラメータの値が変わっても、一定の基準角力積zの負担感で歩くことが可能になる。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者の筋力に応じた歩行支援を行う。
【解決手段】装着型ロボット1(図1)は、超音波センサ35によって装着者の大腿部の筋厚と皮脂厚を測定し、これによって装着者の骨格筋率(体組成情報)を推定する。装着型ロボット1は、予め様々な被験者の骨格筋率の平均値を記憶しており、装着者の骨格筋率が平均値よりも小さい場合は、アシスト力を強めに調節し、平均値よりも大きい場合はアシスト力を弱めに調節する。即ち、装着型ロボット1は、装着者の骨格筋率によって装着者の脚部の筋力を推定し、筋力が弱い場合にはアシスト力を強めに設定し、筋力が強い場合はアシスト力を弱めに設定する。このように、装着型ロボット1は、装着者の脚部の筋力の個人差に応じて自動的にアシスト力を調節するため、装着者は、筋力の個人差によらずに快適な歩行支援を受けることができる。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行面の種類に応じた歩行支援を行う。
【解決手段】装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。装着型ロボット1は、各関節の角度を計算することができ、これら関節の角度とつま先や踵の接地の有無から、装着者が歩行する歩行面の種類を判定する。装着型ロボット1は、判定した歩行面の種類に応じて各アシストアクチュエータの力を調節することにより、平地を歩行しているのと同程度の力加減で階段や坂道を上り下りできるようにする。このように、装着型ロボット1は、各歩行シーンを判定し、歩行シーンに応じたアシスト力を与えることで歩行シーンの違いで人が出力する力を意識することなく歩けるようにする。
(もっと読む)
装着型動作支援装置
【課題】腰部フレームと、腰部フレームの上部に接続されて装着者の肩に係留される背部フレームと、腰部フレームの下部に接続されて装着者の下肢に係留される下肢フレームとを備えた身体装着型動作支援装置であって、装着者の歩行時に装着者の骨盤の揺動に起因する背部フレームの揺れを抑制することを目的とする。
【解決手段】装着型動作支援装置10に、装着者の左右方向に長尺な基部31を有する腰部フレーム30と、腰部フレーム30の下部に接続される左右一対の下肢フレーム50,50と、腰部フレーム30の基部31の上部に接続される背部フレーム40と、背部フレーム40と腰部フレーム30の基部31とを接続する接続部70とを備える。接続部70は、前額面上の1自由度の回転機構であって、例えば、四節リンク機構で構成される。
(もっと読む)
円弧状レールの製造方法
【課題】円弧状の内周壁及び外周壁と、両周壁をその側縁で連結する一対の側壁と、内周壁又は外周壁の中央部に長手方向に沿って形成されたスリットとを有する断面C字状の円弧状レールを、金属製薄板を用いて適切に製造する。
【解決手段】金属製薄板状のリングRをスピニング製法で折り曲げることにより側壁313及びスリットにより分割された内周壁又は外周壁の幅方向両側の分割周壁部分312の一方を形成する第1工程と、スリット314の幅以下に幅方向に分割された複数の中子41〜43を用いて、中子41〜43を包み込むようにして、スピニング製法により側壁313及び分割周壁部分312の他方を形成する第2工程と、スリット314から複数の中子41〜43を個別に抜き去る第3工程とを備える。
(もっと読む)
短下肢装具
【課題】ダンパが揺動する必要のない短下肢装具を提供する。
【解決手段】短下肢装具10は、ユーザの下腿に装着される下腿部材12と、ユーザの足に装着される足部材14と、ダンパ40と連結機構20を備える。足部材14は、下腿部材12に揺動可能に連結されている。ダンパ40は、可動端が動くことによって粘性抵抗を付与する。ダンパ40は、下腿部材12に固定されており、下腿部材12がユーザに装着されたときに可動端が下腿の長手方向に沿って動く。連結機構20は、足部材14をダンパ40の可動端に連結する。連結機構20は、足部材14の揺動に連動してダンパ40の可動端を動かす。
(もっと読む)
補てつ肢又は装具用の取り換え可能なフェアリング
フェアリングは補てつ肢又は装具の外観を変えるため補てつ肢又は装具上に取り付けられる。補てつ肢の外面は完全な肢のミラー画像であってもよく、該装具の外面は負傷肢に対応する外面を有してもよい。フェアリングは補てつ肢又は装具の周りに密接に適合するので、該フェアリングの内面は完全な肢のミラー画像又は負傷した肢の外面に対応する表面を有する。 (もっと読む)
義足組み立て用の測定装置
【課題】本発明は、従来にない作用効果を達成する画期的な義足組み立て用の測定装置を提供することを目的とする。
【解決手段】義足Fにおける前記上側構造部1に対する前記下側構造部2の適正位置を測定するものである。
(もっと読む)
動作補助装置、及び該動作補助装置を管理する情報管理装置
【課題】動作補助装置の使用状況を効率よく管理し、最適な状態を維持する。
【解決手段】動作補助装置において、装着者の関節の角度を検出する第1の検出手段と、装着者の筋活動に伴う生体信号を検出する第2の検出手段と、駆動源の駆動トルクを検出する第3の検出手段と、基準パラメータデータベース、指令信号データベース、及び前記第1から第3の検出手段の検出信号からなる動作履歴情報が格納される格納手段と、前記動作履歴情報を管理者側に送信し、前記管理者側からの前記基準パラメータ及び/又は指令信号を受信する通信手段と、前記更新情報の該当するフェーズに対応させて更新情報を格納する更新制御手段と、関節角度信号と、基準パラメータとを比較することにより、前記装着者の動作のフェーズを推定し、推定されたフェーズに対応する指令信号に基づいて、前記駆動源を駆動する制御手段を備えることにより、上記課題を解決する。
(もっと読む)
調節可能な義肢
義肢システムは、形状変更可能なソケットを有する。ソケットは、ソケットの適合具合を調節するために、形状を変化させる。ソケットは、窓のあるソケット本体と、窓の中に位置付けられたパネルを有する。パネルとソケット本体は協働して、残肢を受けるための空洞を画定する。レーシングシステムがソケット本体とパネルの両方に連結され、パネルをソケット本体に関して移動させ、空洞の容積を調節する。張力機構がレーシングシステムを保持して、調節パネルを位置決めする。義肢システムはまた、空洞内からの湿分の排出も可能にする。 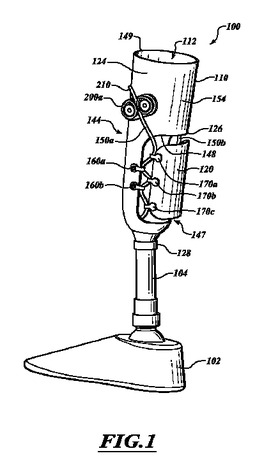 (もっと読む)
(もっと読む)
歩行補助装置
【課題】患脚を健常脚と同等に動かせないことを許容しつつ、患脚の動きを円滑に補助する歩行補助装置を提供する。
【解決手段】ユーザの一方の脚にトルクを与えて歩行動作を補助する歩行補助装置10は、記憶装置32とコントローラ30を備える。記憶装置32には、両脚の軌道が同じ曲線を描く歩行時の脚の軌道を記述した基準歩行パターンが記憶されている。コントローラは、脚センサによって検出されるユーザの第2脚の動きに同期してモータ26を制御する。コントローラは、次の処理、即ち、(1)基準歩行パターンにおける第1脚の遊脚時の軌道を時間軸又は前後方向距離軸のいずれか一方の軸に沿って1でない係数で伸縮した目標遊脚軌道を生成する処理、(2)第1脚の遊脚中の動きが目標遊脚軌道に追従するようにモータ26を制御する処理を実行する。歩行補助装置10は、1でない係数を導入することによって、健常脚用の軌道から患脚用の軌道を生成する。
(もっと読む)
歩行能力についての評価方法および評価装置
【課題】少ない歩数においても歩行能力を客観的に評価することができる技術の提供。
【解決手段】マイクロコンピュータによって歩行周期を多段階に分割し、グループ化することを前提とする。義足装着者が歩行訓練をするとき、訓練が進むにつれて、時系列的に取得する歩行周期がグループを超えて変化する傾向が大である。そこで、そのような歩行周期の変化、すなわち、グループあるいはブロックの移動回数や頻度の大きさを歩行能力のための評価指標とすることができる。マイクロコンピュータ機能をもつインテリジェント義足などでは、義足自体が備えるマイコン回路およびセンサ手段などを活用して評価を行うことができる。
(もっと読む)
大腿切断患者用自動義足
切断患者の大腿連結部(100)に適用される大腿義足(P)であって、患者の大腿連結部に連結される上部ヒンジ(1)、膝の動きを再現する機能を有する関節軸(2)、大腿部に駆動可能に連結する脛骨・ふくらはぎ筋肉装置(3)およびふくらはぎ筋肉の機能をいくらか再現し、義足がブレーキをかけ、歩行の典型的な連続したスイングとスタンス段階を可能にするダンパ(5)とを備える。ダンパはシリンダ(5c)を備え、ピストン(10)およびステム(9)が互いに連結作用して、義足にかかる力に対応して、該ダンパの減衰反応をもたらす。特に、力変換器はダンパ、特にステムに設ける。マイクロプロセッサは変換器から力信号を受信し、検出された力信号に応じてダンパの反応を調整する手段を作動させる。 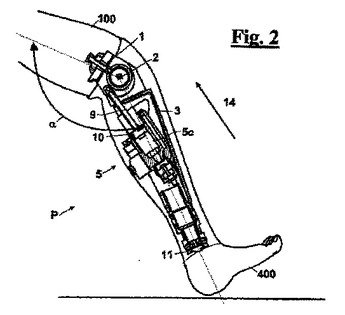 (もっと読む)
(もっと読む)
曲線案内機構及び歩行補助装置
【課題】円弧形状の案内軌道を有する案内体と、案内軌道に複数の回転体を介して移動自在に係合する可動体とから成る曲線案内機構において、可動体を小型軽量化できると共に異物の噛み込みも防止できるようにする。
【解決手段】案内軌道は案内体31に形成した円弧形状の案内溝33で構成される。可動体32に、案内溝33の長手方向に離隔して配置される複数の回転体から成る回転体列が溝幅方向に離隔して2列設けられる。各回転体列は、案内溝33の内周側の溝壁面に転動自在に当接する少なくとも1個の内側回転体341と、案内溝33の外周側の溝壁面に転動自在に当接する少なくとも1個の外側回転体342とで構成される構成される。また、案内体31は、案内溝33の内周側の溝壁面と外周側の溝壁面とを結ぶ縦壁部313を有し、可動体32に、溝幅方向から縦壁部313に当接するスラスト受け35が取付けられる。
(もっと読む)
接地圧力を皮膚触覚に伝達する機構を有する義足・下肢装具・靴
【課題】足底接地面の接地圧力の有無、分布、大きさを下肢障害者及び視覚障害者の皮膚触覚に伝達する義足、下肢装具、靴を提供する。
【解決手段】義足・下肢装具・靴の足底接地面に圧力入力装置9を配置し、皮膚刺激装置12に該出力を皮膚触覚に提示しうる身体部位に配置し、圧力入力装置9と皮膚刺激装置12を接続手段にて接続することにより、圧力入力装置9から入力された足底圧力に応じた刺激を、皮膚刺激装置12からの出力にて皮膚触覚に伝達する。
(もっと読む)
腰部支援装置
【課題】上半身の自然な屈伸動作を阻むことなく、腰部の負担を軽減できるようにする。
【解決手段】上半身装着具2と、左右一対の大腿部装着具3と、上半身装着具2の左右両側位置と各大腿部装着具3の左右方向の外側位置とを繋ぐ左右一対の荷重伝達装置4とから腰部支援装置1を形成する。荷重伝達装置4は、前後方向に屈伸できる関節部5a,5b,5cを上下方向所要間隔で複数備え、各関節部5a,5b,5cに、屈曲状態を伸ばす方向へ力を付与する空気圧アクチュエータ6a,6b,6cを個別に備える。装着者7が上半身を屈めるときに、一緒に屈曲させられる各荷重伝達部材4を、各装着具2と3の間で突っ張るように作用させることで、装着者7の腰部に作用する荷重の一部を、上半身装着具2と荷重伝達装置4を介して大腿部装着具3を装着してある装着者7の大腿部で支持させる。
(もっと読む)
解剖学的ソケット作成方法
解剖学的ソケットは切断手術を受けた手足と義足装置間の中間部でありうるその切断手術を受けた手足に取り付くように造形される。本方法は利用者毎に特定の測定値に基づいて、その利用者に容姿効果、より広範な動作、よりきれいな歩き方ならびに心地よさがもたらされる解剖学的ソケットを製作するものである。本ソケットには股関節を最大限に動かしやすくできる底部上側縁がある。本ソケットは耐久性がありかつ滑らかなプラスチックで製作される。本ソケットは安全にしかも取り外しできる方法で義肢にぴったり合わされる。ここで公開されるこの方法では、最適な合わせ具合と心地よさがもたらされるよう着用者の手足に対し正確な測定値が利用される。 (もっと読む)
義足用エアシリンダ装置の内圧を確保する方法および装置
【課題】空気ばね作用を生ずべき室の内圧を有効に確保する。
【解決手段】義足用エアシリンダ装置110の作動時、クッション室83が負圧傾向になる。この発明では、その負圧と外気圧(大気圧)との差圧を利用し、クッション室83に差圧分の外気を導入する。そのため、クッション室83に対し、逆止弁95付きの新たな通路85を設ける。また、静止時の内圧を大気圧にするため、クッション室83に対し洩れ通路を設けるのが好ましい。洩れ通路として、たとえば、ピストンロッド周りのダストシール116の通気性を利用することができる。
(もっと読む)
1 - 20 / 31
[ Back to top ]