
Fターム[4C117XC23]の内容
Fターム[4C117XC23]の下位に属するFターム
ペットロボット (1)
Fターム[4C117XC23]に分類される特許
1 - 11 / 11
見守りロボット、見守り方法、及び見守りプログラム

【課題】積極的にユーザーに働きかけることによって、ユーザーの状況や動作を把握することができるとともに、把握した状況や動作の認識の精度を高めることができる見守りロボット、見守り方法、及び見守りプログラムを提供すること。
【解決手段】見守りロボット10は、ユーザーの身体情報を取得するユーザー情報入力部13から取得した身体情報とユーザーの意思又は状態とを対応付ける一の基準を作成する基準作成部14を備え、基準作成部14は、取得した身体情報から意思又は状態を分析するユーザー認識部17と、ユーザー認識部17による分析結果をユーザーに確認して意思又は状態を形式化するルール生成部18と、ユーザーと同一又は類似する属性を有する他のユーザーの意思又は状態を表す他の基準を収集するルール収集部20と、他の基準の特徴を抽出して一の基準を修正するデータマイニング部21と、を備えている。
(もっと読む)
マルチキャスト機能を有するテレプレゼンス・ロボット・システム
ロボットが供給する情報を表示するロボット・ビュー・フィールドと、ロボット情報を受信できる1人または複数のオブザーバに関するオブザーバ情報を表示するオブザーバ・ビュー・フィールドとを含む、遠隔制御ロボット・システム用のグラフィカル・ユーザ・インターフェース。このインターフェースは、マスタ・ユーザがオブザーバの観察および参加を制御できるようになる様々な機能を有している。 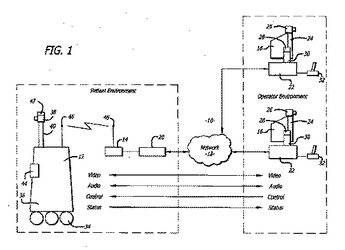 (もっと読む)
(もっと読む)
性格判別装置、性格判別方法、コミュニケーションロボットおよび電子機器

【構成】 コミュニケーションロボット10はCPU60を含み、CPU60は皮膚センサ58によって検出された検出信号に基づいて、人間が触っている場所(部位)、強度および継続時間を検出する。CPU60は、この検出結果に基づいて、人間の性格を、積極的、消極的、荒っぽい、自由奔放および不明のいずれかに判別する。つまり、ロボット10は、自身に接した人間の性格を判別する。たとえば、ロボット10は、人間の性格を判別すると、当該人間の性格に応じたコミュニケーション行動を実行する。
【効果】 簡単に人間の性別を判別して、適切なサービスを提供することができる。
(もっと読む)
認知症診断支援システム
【課題】認知症の疑いのある患者に対して、認知症であるかどうか、その症状レベルはどの程度であるかの診断を医師に対して支援する認知症診断支援システムを提供する。
【解決手段】患者側装置は患者情報読取部と出力部と入力受付部と患者側情報送受信部とを有しており、サーバは各種情報記憶部と、質問記憶部と、サーバ側情報送受信部と、患者の個人情報に基づいて電子カルテ情報を抽出する患者特定部と、抽出した電子カルテ情報に基づいて患者の認知症の症状レベルを特定してそれに応じた質問と正解を生成する質問・正解生成部と、患者の回答と正解とを比較して正誤の判定を行う回答判定部と、患者の認知症の症状レベルの判定を行う症状レベル判定部とを有しており、記憶した質問には動的な情報が含まれており、動的な情報を各種情報記憶部から抽出することにより患者に応じた質問と回答を生成する認知症診断支援システムである。
(もっと読む)
盲導犬型ロボット
【課題】 目が不自由な飼い主が従来の盲導犬型ロボットの手綱を離してしまうと、手綱を探すことは困難である。
また、飼い主が急病で倒れそうになっても、従来の盲導犬型ロボットはそれに気付かないという課題がある。
【解決手段】 目が不自由な飼い主と盲導犬のように接触して誘導するロボットであって、該飼い主を認識する手段と、該飼い主が該ロボットに接触していることを認知する手段を備え、該飼い主が該ロボットから離れると該飼い主を探して接触する機能および、該飼い主の健康状態を診察する機能を備える。
(もっと読む)
救命支援ロボットシステム
【課題】医療遠方地域においても医療可能センタからの医療行為が可能であると共に患者を医療側に迅速に運ぶことができる救命支援ロボットシステムを提供することを目的とする。
【解決手段】ロボット遠隔制御装置1と、ロボット遠隔制御装置と基地局28a、28bを介して通信を行うロボット装置2とを有し、ロボット遠隔制御装置は制御データに基いてロボット装置を制御する救命支援ロボットシステムであって、ロボット装置は、生体情報を得る生体情報センサ25〜27を有し、ロボット遠隔制御装置は、生体情報を移動体通信により取得して解析する。これにより、医療遠方地域においても医療可能センタからの医療行為が可能である救命支援ロボットシステムが得られる。
(もっと読む)
ストレスケア装置およびそれを備えてなる空調装置ならびにロボット装置
【課題】疲労、ストレス、緊張度を感じている時に、最適なタイミングで、リラックス効果あるいはリフレッシュ効果のある音、色、臭い、動作・表情、表示を出することができるストレスケア装置を提供する。
【解決手段】使用者の生体反応に関する情報である生体情報を受信する生体情報受信部と、受信した生体情報から使用者の緊張状態もしくは疲労状態を判定する状態判定部と、状態判定部の判定結果に基づいて使用者に緊張緩和もしくは疲労軽減の効果を与える刺激の発生を制御する刺激制御部と、刺激制御部の制御に従って刺激を発生する刺激発生部とを備えるストレスケア装置。
(もっと読む)
ロボットを用いたヘルスケアサービスシステム
【課題】ユーザが自発的に装着して計測するデータ計測装置を含む生体データ計測装置を用いながら、ユーザが計測装置の装着を怠ったり忘れたり、計測装置の装着不備をおこすのを防ぐと共に、心臓病、高血圧、糖尿病、肥満等を判定して生活習慣病を防いだり発見できるようにしたロボットを用いたヘルスケアサービスシステムを提供する。
【解決手段】ロボットに、ユーザの生活パターンをデータベース化する機能、ユーザが生体センサを装着して計測する時間になったらユーザとの会話で計測をユーザに促す機能、生体センサからの信号を無線で受ける機能、計測した生体データの異常判定機能、撮像装置で撮像したユーザの画像データとユーザとの会話によりユーザの異常判定機能、異常と判定された場合、ロボットに設けられたネットワーク通信部からネットワークを介してヘルスケアサービスセンタ及び/または医療機関に連絡する機能を設けた。
(もっと読む)
行動表現システム、および行動表現処理装置
【課題】 高齢者の生活パターンは高齢者の生活を見守る側にとって退屈なものであり、見守り作業は単調である。その結果、見守りには“慣れ”や“飽き”が生じ易い。本発明は、高齢者の行動を表出するロボットを見守る場合における、近親者の見守りへの“慣れ”や“飽き”といったマンネリ化を防止することを目的とする。
【解決手段】 高齢者の動作を検知する第1の動作検知手段401により得られた第1の検知結果に依存して、高齢者の行動を近親者宅のロボット200で表出させる一方、近親者の見守り動作を検知する第2の動作検知手段105、201により得られた第2の検知結果から近親者の関心度を推定し、その結果をフィードバックさせることでロボット200の行動表出に変化を与える。
(もっと読む)
推定システム、推定装置およびセンシング装置
【課題】 動きが少ない場合にも、被験者の状態を的確に推定・類別できるシステムを提供する。
【解決手段】 環境側に設置されたセンサー群等から取得される検出情報に加え、被験者に能動的に働き掛ける自走式ロボットを使用して状態推定を行う。まず、環境側に設置されたセンサー群等からの情報をもとに、被験者の状態を一次推定する。一次推定の確からしさが所定の閾値(たとえば70%)を下回っていれば、自走式ロボットにて被験者に対する働きかけを行い、そのレスポンスから、被験者の状態を二次推定する。被験者に対する働きかけは、音声あるいは接触(触る、叩く、小突く、等)にて行う。これにより、状態推定に有用な情報を収集でき、的確な状態推定・類別を行うことができる。
(もっと読む)
ロボット
【課題】 人の生体情報を検出できる機能を備えることにより、医療関係ロボット、アミューズメントロボット、産業用ロボット等としてより高機能のロボットを提供する。
【解決手段】 ロボットの指の部分に生体情報をセンシングできるセンサ部1を設けている。このセンサ部1は、人の脈拍や血圧等を測るための脈波センサである発光装置11及び受光装置12と、人体のインピーダンスを測定するための電流印加用電極15及び電圧検知用電極16とからなる。そして、受光装置12からの脈波信号や電流印加用電極15及び電圧検知用電極16により測定された人体のインピーダンス値に基づいて、心電、血圧、脈拍、脈波、体温、呼吸、体脂肪、骨密度、脳波、血中酸素濃度、血糖値等の生体情報を演算等により求める。
(もっと読む)
1 - 11 / 11
[ Back to top ]