
Fターム[4C601GA26]の内容
Fターム[4C601GA26]の下位に属するFターム
超音波反射体を用いるもの (34)
Fターム[4C601GA26]に分類される特許
1 - 19 / 19
超音波診断装置及び制御プログラム
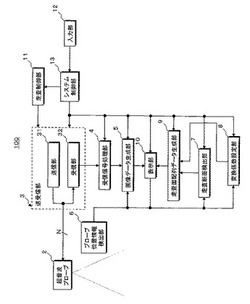
【課題】病巣部の見逃しリスク低減を目的とした走査面配列データの生成及び表示
【解決手段】超音波プローブを移動させることにより被検体の検査対象領域に形成される複数の走査断面において画像データを収集する超音波診断装置100は、前記超音波プローブのプローブ位置情報を検出するプローブ位置情報検出部6と、前記プローブ位置情報に基づいて前記走査断面の位置情報を検出する走査断面検出部7と、前記超音波プローブから所定距離に設定された基準面における前記走査断面の位置情報に基づいて走査面配列データを生成する走査面配列データ生成部9と、前記走査面配列データを表示する表示部10を備える。
(もっと読む)
実時間ボリューム測定超音波に基づいた自動血管アクセス装置、システム及び方法

【課題】実時間ボリューム測定超音波に基づいた自動血管アクセス装置、システム及び方法を提供する。
【解決手段】自動血管アクセス装置(700)は、プローブと、プローブに結合された制御装置と、制御装置に結合された少なくとも1つのモータとを有する。制御装置は、実時間ボリューム測定超音波走査VOI画像に基づいて少なくとも1つの制御パラメータを決定し、該パラメータに基づいてモータの動作を駆動する。本発明によって開示した自動血管アクセス装置、システム及び方法を用いることによって、針の挿入経路をより正確かつ確実にすることができ、従って、血管アクセス処置の成功率を改善し、且つオペレータの負担を大幅に軽減する。
(もっと読む)
信号処理装置、制御方法、並びに信号処理システムおよび方法
【課題】超音波画像を生成する場合に、信号処理を行う際に必要となる電力を削減することができるようにする。
【解決手段】制御部は、電池ユニットの電池の消費を抑えるため、加速度センサおよび圧力センサにより検出された情報に応じて、振動子から受信する信号または振動子へ送信する信号を処理する信号処理ブロックを構成する各部のパフォーマンスを下げるように制御する。本開示は、例えば、超音波画像を撮影するプローブおよび超音波画像を生成し表示する装置からなる信号処理システムに適用することができる。
(もっと読む)
超音波測定装置及び超音波測定装置の制御方法
【課題】超音波測定を被検者自身が容易に行うことのできる機器等の提案。
【解決手段】超音波測定装置において、本体部30の裏面部には、血管位置判定用アレイ10と血管性状測定用アレイ20との2本のアレイで構成される超音波振動子アレイが構成されている。血管位置判定用アレイ10は、超音波振動子を第1方向に沿って配列した第1アレイ11と、超音波振動子を第1方向と平行な第2方向に沿って配列した第2アレイ12との平行な2本のアレイを有する。血管性状測定用アレイ20は、複数の超音波振動子の組でなる超音波振動子組を第1方向に交差する第3方向に沿って配列し、各超音波振動子組を第1方向に徐々にずらして配列して構成される。
(もっと読む)
超音波診断装置、超音波診断装置用のプローブ状態検出装置及びプログラム
【課題】 得られた超音波画像から、血管に対する超音波プローブの位置姿勢を自動的に特定し、WIの計測前における超音波プローブの位置決めを簡単に行うことに寄与する。
【解決手段】 超音波診断装置11は、超音波画像に対して画像処理を行うことで、超音波画像が得られた時の超音波プローブ15の血管に対する様々な配置状態を検出可能なプローブ状態検出機能23を備えている。プローブ状態検出機能23は、プローブ15の接触面20の皮膚への接触状態を判定する接触判定手段27と、プローブ15が平行配置されているか否かを判定する平行配置判定手段28と、プローブ15の交差配置状態を検出する交差状態検出手段29と、プローブ15の最適配置状態を検出する最適状態検出手段32と、画像中の血管が頸動脈か否かを判定する頸動脈判定手段30と、画像中の血管の延出角度が適切か否かを判定する傾斜角度判定手段31とを備えている。
(もっと読む)
超音波画像を三次元座標システムに登録するシステム
【課題】内部解剖学的構造を画像化するシステムを提供すること。
【解決手段】解剖学的構造の超音波画像データを第1の座標システム内で得て、グラフィカルデータ(例えば、興味のある部位)を第2の座標システム内で得る。第1の座標システムと第2の座標システム内の超音波トランスデューサの位置が決定され、第1及び第2の座標システム間の変換が、第1及び第2の座標システム内の超音波トランスデューサの位置に基づいて実行される。この変換を用いて、第1の座標システム内ですでに得ている超音波画像データを、グラフィカルデータと共に第2の座標システム内に登録して表示することができる。
(もっと読む)
距離センサを使用した衝突の回避と探知
本内視鏡に係る方法は、体の解剖学的領域における対象位置へと、内視鏡ロボットによる操作で、内視鏡を進めること、及び、内視鏡が、内視鏡ロボットによって対象位置へと進められるにつれて、その解剖学的領域の複数の単眼の内視鏡イメージを生成すること、を含む。単眼の内視鏡イメージにおいて、内視鏡と対象物との衝突を回避するため、または、探知するために、本方法は、更に、内視鏡が、内視鏡ロボットによって対象位置へと進められるにつれて、対象物からの内視鏡の距離測定値を生成すること、及び、その距離測定値に応じて、単眼の内視鏡イメージにおいて、対象物の表面の三次元イメージを再構築すること、を含む。 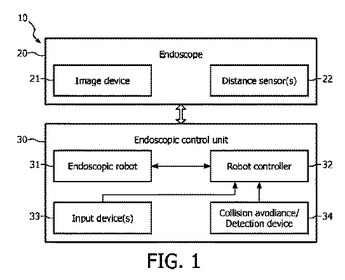 (もっと読む)
(もっと読む)
3D造影超音波を使用する介入ナビゲーション
3D造影超音波(CEUS)イメージング10を使用する介入のナビゲーションのための方法は、生体構造に投与される造影剤の有効な寿命の間に器具40での介入の治療を受ける生体構造22の所望の部分のための追跡情報と基準3D CEUSボリュームとを獲得するステップを有する。リアルタイムに追跡された組織画像は、介入の治療の間に獲得される。加えて、獲得されたリアルタイムに追跡された組織画像の少なくとも一つの画像に対する少なくとも一つの対応する造影超音波画像の多断面再構成(MPR)44が生成される。獲得されたリアルタイムに追跡された組織画像の対応する一つの画像が、対応するCEUS MPRと一緒に表示される(20)。表示されたリアルタイムに追跡された組織画像は生体構造の所望の部分内で少なくとも器具の画像を含み、CEUS MPRは表示されたリアルタイムに追跡された組織画像に対応する。CEUS MPR画像は、基準3D CEUSボリュームから得られた造影MPR画像を含み、関心ターゲットボリューム46を含み、これにより、造影の有効な寿命の満了に少なくとも続く介入のナビゲーションのために有効な造影画像情報及び組織画像情報の同時の表示を提供する。 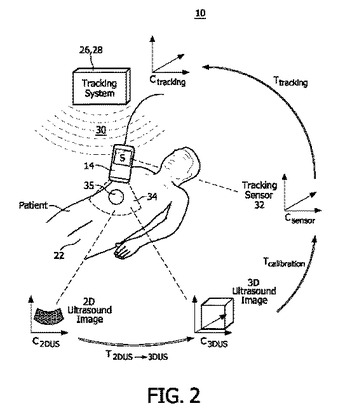 (もっと読む)
(もっと読む)
エコー造影可能な金属針
【課題】汎用の超音波撮影装置を用いた場合でも、確実に造影可能な体内挿入用の金属針を提供すること。
【解決手段】本発明の金属針は、金属の強酸溶液、酢酸、および酢酸ブチルからなる群より選択される液体に浸漬した後、乾燥させることによって得られる。好適には、浸漬処理に用いられる金属の強酸溶液は、遷移元素、ランタノイド、およびアクチノイドからなる群より選択される金属の硝酸溶液、例えば、パラジウム、ガドリニウム、ゲルマニウム、ベリリウム、ストロンチウム、スカンジウム、およびサマリウムからなる群より選択される金属の硝酸溶液であり得る。本発明の金属針は、血管内への挿入、臓器への到達の確認、折れた場合の針位置の確認などに有用である。
(もっと読む)
肛門直腸を検査する方法および装置
肛門直腸プローブシステムは、患者の直腸内に挿入される挿入端部を含み、挿入端部にまたはこれに隣接して配置された超音波データを収集する超音波トランスデューサを有する肛門直腸プローブアセンブリと、挿入端部より遠位側の所定のポイントにて、プローブアセンブリを回転式に係合した実装部とを備え、実装部は、挿入端部と回転係合ポイントの中間ポイントにて、プローブアセンブリとピボット回転式に連結され、ピボット連結部の周りに所定のモーメントを与えたとき、実装部とプローブアセンブリは、プローブアセンブリがピボット連結部の周りで選択的にピボット回転できるように構成されている。 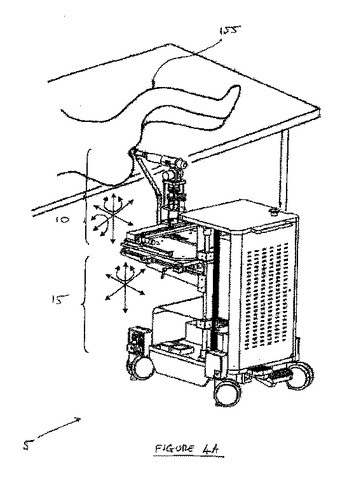 (もっと読む)
(もっと読む)
超音波診断装置
【課題】超音波プローブを走査する位置や向きにかかわらず、その位置検出を高精度に行なうことができ、この位置情報に基づく高精度の3次元超音波画像が得られる超音波診断装置を提供することを目的とする。
【解決手段】超音波プローブ12の位置データを算出する位置データ信号処理回路9と、この位置データ信号処理回路9により算出された超音波プローブ12の位置データを、画像収集ユニット3に収集された複数枚の超音波画像の位置データとして用い、当該画像を画像処理して3次元超音波画像を生成する演算ユニット5と、レシーバ7からの信号に基づく位置検出状態をモニタする位置データチェック部10と、この位置データチェック部10によりモニタされた位置検出状態に基づく所定のメッセージを表示する表示ユニット6と、を具備する。
(もっと読む)
カテーテル装置および血管閉塞の治療時の画像監視方法
【課題】画像化カテーテルの合間の引き戻しおよび治療カテーテルの再度の挿入を行なわれなくてもすみ、かつ近接範囲においても遠隔範囲においても詳細な画像情報が得られる画像監視下での血管閉塞の最適な治療が可能するカテーテル装置を提供する。
【解決手段】位置センサシステムと共に構成され、画像監視下で部分的および/または完全な血管閉塞を治療するための治療カテーテル装置において、カテーテル装置(1)が、特にプラークの取除きおよび/または破壊および/または血管の拡張により血管閉塞を治療するための治療カテーテルを有し、治療カテーテルが、画像監視のためのOCTカテーテルおよびIVUSカテーテルならびに位置センサシステムと共に、一体化ユニットとして、特に複合式カテーテルとして構成されている。
(もっと読む)
超音波診断装置
【課題】 超音波振動子が大型化するロータリ・エンコードなどの原点検出手段を超音波探触子内に設けることなく超音波素子の揺動方向の原点を正確に検出する。
【解決手段】 超音波信号により2次元の断層面を電気的又は機械的に走査する超音波素子11をウインドウ内12で2次元の断面と直交する方向に機械的に揺動する場合に、ウインドウ12の金型成型時に形成されるゲート部12aを原点位置に形成し、感度比較回路26は受信信号とスレシュホールドレベルとを比較してゲート部により感度が劣化する位置で超音波素子の揺動方向の原点検出信号を出力する。
(もっと読む)
超音波的に検知可能な子宮内用システム及び超音波検知を改善する方法
超音波的に検知可能な子宮内用システム及び該システムの超音波検知を改善する方法を開示する。更に、子宮内用システムのボディーの少なくとも一部に形成された不活性金属被覆、又は、子宮内用システムのボディーに固定されている少なくとも1つの不活性金属製のクリップ、ピン、リング又はスリーブを開示する。 (もっと読む)
第1座標系に関係する医療情報をMPSシステムを使用する第2座標系において位置合わせする方法及びシステム
第1画像を第2画像に位置合わせするシステムであって、該システムは、患者の身体の第1位置及び方向を検出する第1医療位置決めシステム(226)と、前記身体の第2位置及び方向を検出する第2医療位置決めシステム(236)と、第2イメージャ及び第2医療位置決めシステムに結合される位置合わせモジュール(232)とを含み、前記第1医療位置決めシステムは第1イメージャ(224)に関係付けられると共に結合され、前記第1イメージャは前記身体の第1画像を取得し、前記第1イメージャは、前記第1画像を、前記第1画像を前記第1位置及び方向と関係付けることによって発生し、前記第2医療位置決めシステムは、前記第2イメージャ(234)に関係付けられると共に結合され、前記第2イメージャは、前記第2画像を取得し、前記第2画像を前記第2位置及び方向と関係付け、前記位置合わせモジュールは、前記第1位置及び方向及び前記第2位置及び方向にしたがって、前記第1画像を前記第2画像に位置合わせする。 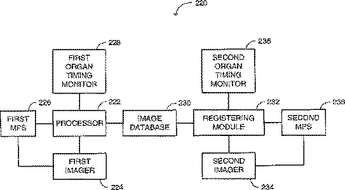 (もっと読む)
(もっと読む)
高周波切除を行う間の3−D超音波ナビゲーション
【課題】
【解決手段】 医療デバイスの位置の追跡と身体内の組織の切除を同時に行うシステム。このシステムは、電源と、ナビゲーションデバイスと、制御回路とを具える。電源は、心臓組織などの組織を切除するのに好適な電流を発生する。ナビゲーションデバイスは、三次元基準座標システムを設定し、設定した座標システムに対するエネルギィ送出デバイスの位置を同定する。制御回路は、電源の始動と、設定した座標システム内の医療デバイスの位置を同定する超音波データの捕捉との間で切替又は交番を行う。
(もっと読む)
画像情報を用いるカテーテル追跡用システム
体内のカテーテルの位置追跡用システムであって、画像データを解析することによって、カテーテルのイメージングヘッドの位置を計算するものである。上記解析は、自由裁量によって選択された基準面に対する、3次元空間内のイメージングヘッドの位置を測定して行う。画像は、基準画像と比較され、2つの画像の対応する位置の相関データが収集され、特定方向の相関損失率が、測定される。この相関損失率は、指数関数のように変化する。指数関数は、画像と、基準画像と、の間の分離角度を概算し、評価される。1以上の分離角度は、基準画像に対する、画像の位置を測定するのに用いられる。この処理を一連の画像について繰り返し実行することによって、カテーテルの位置が、測定される。その上、体内の腔のマップが、生成できる。 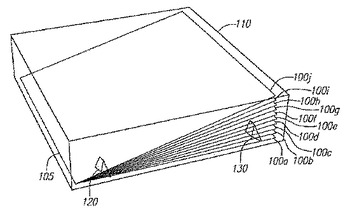 (もっと読む)
(もっと読む)
自動ガイドワイヤ操作システム及び方法
患者の体の内腔系を通るカテーテルを、内腔系内の所定位置まで誘導するシステムが、医療用測位システムと、前記カテーテルに結合された移動機構と、前記医療用測位システム及び前記移動機構に結合されたコントローラとを具え、前記医療用測位システムは少なくとも1つの位置検出器を具え、この位置検出器は前記カテーテルの末端部分に強固に取り付けられ、前記医療用測位システムは前記位置検出器の位置を測定し、前記コントローラは、上記位置及び内腔系の少なくとも一部分のトポロジ表現に応じて、前記移動機構の動作を制御して前記カテーテルを前記所定位置まで移動させる。 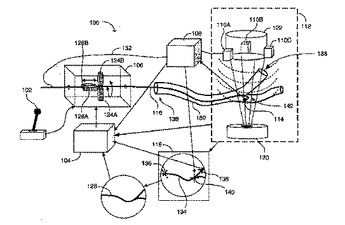 (もっと読む)
(もっと読む)
超音波画像を三次元座標システムに登録するシステム
【課題】
【解決手段】 解剖学的構造の超音波画像データを第1の座標システム内で得て、グラフィカルデータ(例えば、興味のある部位)を第2の座標システム内で得る。第1の座標システムと第2の座標システム内の超音波トランスデューサの位置が決定され、第1及び第2の座標システム間の変換が、第1及び第2の座標システム内の超音波トランスデューサの位置に基づいて実行される。この変換を用いて、第1の座標システム内ですでに得ている超音波画像データを、グラフィカルデータと共に第2の座標システム内に登録して表示することができる。
(もっと読む)
1 - 19 / 19
[ Back to top ]