
Fターム[4D073CB24]の内容
噴霧設備又は装置の細部及びその付属品 (3,538) | 放出装置の取付け又は支持 (262) | ノズルの位置又は方向の調整又は変更 (71) | 自動調整又は遠隔調整 (13)
Fターム[4D073CB24]の下位に属するFターム
噴霧圧力を利用するもの (1)
Fターム[4D073CB24]に分類される特許
1 - 12 / 12
油塗布装置
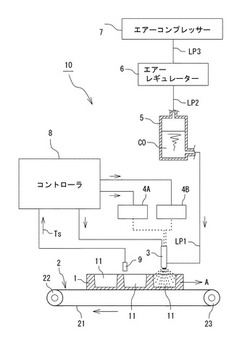
【課題】天板の表面に設けられた凹状の型内の内壁や底面に均一、且つ、充分に油を塗布することが可能な新規かつ独自の油塗布装置を提供する。
【解決手段】ベルト21によって天板1が搬送され、ベルト21の上方にはノズル列3が設置され、ノズル水平移動機構4A及びノズル上下移動機構4Bによって上下及び水平に移動させることができる。ベルト21によって搬送されてくる天板1は近接センサ9によって検出され、この検知信号と天板1の位置及び予め記憶させてある天板1の形状に関する情報とに基づいて移動機構4A,4Bを動作させて各ノズルを所定位置に移動させると共に各ノズルから食用油を噴射して天板1上に設けられた凹部11の内部に所定量の油を均一に塗布する様に各ノズルの位置及び食用油の噴射をコントローラ8で制御する。
(もっと読む)
マスキング治具を用いたマスキング装置

【課題】マスキング治具を用いたマスキング作業をロボットにより効率的に行うことができるマスキング装置の提供。
【解決手段】マスキング治具26を第2のロボット20で取り出すステップS5は、ステップS6の前までに完了していればよく、ステップS2が終了するまで、或いはステップS4と並行して行うことができる。第2のロボットによるマスキング治具の取出し作業を、第1のロボットによるワークの検出・取出し又は接着剤の塗布と並行して行うことができるので、サイクルタイムを短縮することができる。
(もっと読む)
塗装用ロボットシステム
【課題】複数の塗装工程を一台のロボットで行えるようにし、装置全体の設置面積を縮小することが可能な塗装用ロボットシステムを提供する。
【解決手段】塗装用ロボットシステム10は、ロボットアーム21を有するロボット20と、ロボット20のロボットアーム21の先端21aに取り付けられた支持部材30と、支持部材30に、回動軸J1、J2を中心に回動自在に取り付けられたスプレーユニット40A、40Bとを備えている。各スプレーユニット40A、40Bは、塗料を塗布する複数のスプレーガン51A−53A、51B−53Bを有している。複数のスプレーガン51A−53A、51B−53Bは、それぞれ前記回動軸J1、J2を中心に一体となって回動し、使用するスプレーガン51A−53A、51B−53Bを切り替え可能となっている。
(もっと読む)
レール式薬剤散布装置
【課題】レールに沿って走行される主作業機の走行機構を簡易な構造とすることで、小型軽量化と取扱性の向上を図り、他の作業用レールへの横移動も容易に行うことができるレール式薬剤散布装置を提供する。
【解決手段】縦レール2(作業用レール)に沿って走行し、薬液を周囲に散布する散布ノズル3が搭載される主作業機10を有し、該主作業機10は、縦レール2の上側に位置して該縦レール2の上面を転動するつば付きの上部車輪12・13と、該縦レール2の下側に位置して該縦レール2の下面を転動するつば付きの下部車輪14と、該車輪を駆動する駆動モータを有する駆動機構15とを具備し、前記上部車輪12・13は2輪、下部車輪14は1輪設けられ、前記駆動機構15は、これら上部車輪12・13及び下部車輪14の少なくとも1輪を駆動することを特徴とする。
(もっと読む)
遠隔で旋回可能で選択的にロック可能なノズル付き噴霧器
【課題】
遠隔回転噴霧ノズルを有する噴霧器に関連して、噴霧ノズルの方向の望ましくない変化に対応し、ユーザがさらに所定の複数の角度位置の各々にノズルを選択的に設定しうる機器の必要性が存在する
【解決手段】
流体噴霧器は、第1および第2のコンジット開放端の間にコンジット軸に沿って延びるコンジット側壁を備える剛性流体コンジットを含む。コンジット側壁は、第1および第2の開放端の間で延びる流体通路を形成する。流体排出孔を備える噴霧ノズルは、このノズルがコンジット軸に直角に延びるノズル旋回軸を中心として旋回するとともに、第1のコンジット端に導入される流体が流体排出孔から排出されるように、第2のコンジット端に接続される。ノズルアクチュエータがコンジット軸に垂直な空間的広がりの構成要素を有するアクチュエータ回転軸を中心として双方向に回転するコンジットに取り付けられる。ノズルアクチュエータおよびノズルは、アクチュエータの回転によってノズルがコンジット軸に対して旋回するように機械的に連結される。噴霧角度セレクタが、ノズルアクチュエータと連動して回転し角度選択面を含む。流体コンジットに対して固定された基部を備えるセレクタストップが、角度選択面に協調的に係合して複数のノズル角度位置を規定し、各ノズル角度位置から旋回運動に対抗する抵抗を発生する。
(もっと読む)
基板に流体を塗布するためのバルブ機構を備えたアプリケータ、アプリケータのクリーニング法、及びアプリケータのバルブ機構
基板に流体を塗布するための塗布装置(1)が、一列に配置されるとともに各々が塗布バルブ・ノズル(31)を備えたバルブ装置(21)と、流体吸入ダクト(110)を有する分配流体チャンバ(11)とを備える。塗布バルブ装置(21)の列内に組み込まれ、クリーニング・バルブ・ノズル(30)を取り付けられたクリーニング・バルブ装置(20)が流体吸入ダクト(110)に結合される。クリーニング・バルブ・ノズルが開いているときに流体チャンバ(11)をクリーニングするために有効な流路(100)が、分配流体チャンバ(11)内の、流体吸入ダクト(110)とクリーニング・バルブ装置(20)との間に形成される。塗布装置(1)をクリーニングする方法は、分配流体チャンバ(11)が加圧されたクリーニング用流体を受け入れ、塗布バルブ装置(21)を閉じたままクリーニング・バルブ・ノズル(30)を開き、次いでクリーニング・バルブ・ノズル(30)を閉じ、分配流体チャンバ(11)が加圧されたクリーニング用流体を受け入れるときに塗布バルブ装置を開く、ステップから成る。塗布装置(1)のバルブ装置(2)は、取り外された状態でバルブ・ピストン(51)を解放する、取り外し可能に取り付けられたノズル・オリフィス(3、4)を有する。バルブ装置(2)はさらに、フロー角の無い状態を維持する直線流体ダクトを有する。調整ピストン(61)が、バルブ・ピストン(51)のストロークを設定及び調整するように、移動可能に取り付けられる。 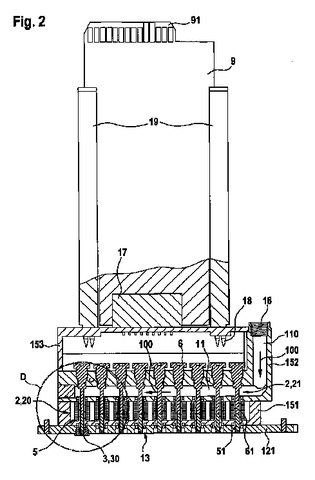 (もっと読む)
(もっと読む)
自動タンク洗浄及び監視装置
タンク洗浄システムは、知られているシステムよりも効率的且つ効果的なタンク洗浄を提供する。このタンク洗浄システムはさらに、洗浄プロセスを監視することを可能にし、洗浄の確証を提供する。この点に関して、このタンク洗浄システムは、スプレーヘッド機構の制御及び監視を提供し、同時に、知られているシステムに関連した機械的な単純さ及び頑丈な性質を維持する。このタンク洗浄システムは、洗浄される容器の1つ又は複数の特性を自動的に考慮し、それに応じて洗浄動作を変更する。 (もっと読む)
流動体塗布方法及び流動体塗布装置
【課題】三角形状や円弧形状のフラップを有する封筒であっても、封緘時に糊や水を良好に塗布することができる技術を提供する。
【解決手段】ベルトコンベア2による搬送経路の途中には、エッジ位置計測用センサ24が配置されている。エッジ位置計測用センサ24の計測範囲をフラップF1が通過するとき、その遮光量に応じてエッジ位置を計測することができる。エンコーダ18の一定パルスごとにエッジ位置を計測し、計測した位置の変化量をΔy、一定パルス間の封筒E1の移動量をΔxとして、エッジの傾きΔy/Δxを算出する。この傾きに合わせてスプレーノズル26を移動させ、フラップF1の形状に合わせて糊又は水を塗布する。
(もっと読む)
薄膜形成方法および形成装置
【課題】
本発明は、第1電極層を形成した素子用基板に、必要な箇所に所望する膜厚で均一に、且つ、容易にパターン形成可能な塗布方法および塗布装置を提供することを課題とする。
【解決手段】
第1電極層が予め所定の回路状にパターンが形成された素子用基板に塗布する装置であって、上部には超音波スプレーノズルを備え、前記素子用基板の表面を覆うパターンマスクを備え、かつ、素子用基板、あるいは該素子用基板設置側には電場形機構を設けることにより解決した。
(もっと読む)
粉末塗布ブース用自動修整装置
本発明は、特に噴霧ブース(3)用の自動修整作業のための部品(5)に粉末の形態の塗布製品を噴霧するのに用いられる装置(17)に関する。本発明は、本質的に垂直な柱状体(18)と、柱状体(18)の全長に沿って本質的に垂直に独立して動くことのできる少なくとも二つのキャリッジ(19)と、キャリッジ(19)で支持され、塗布製品を供給するガン(10)とを有することを特徴としている。本発明は、塗布製品の自動塗布に対して補足的な仕方で行われる部品の自動修整又は予調整に適している。 (もっと読む)
自動制御塗装車両
【課題】航空機等の大型構造物、多種少量品の塗装に対しても、塗装設備の大規模化、高コスト化を招くことなく、塗装工程の自動化を図る。
【解決手段】自動制御塗装車両1に、アクチュエータヘッド7を移動させるアーム6と、ヘッド7の地球上の位置情報を取得するGPS通信端末9と、地球上に位置付けられた塗装領域の情報を記憶する記憶装置を含む制御装置10と、ヘッド7とその周囲の物体との距離を測る測距装置8とを搭載する。GPS通信端末9から取得したヘッド7の位置情報及びアーム6の姿勢情報θ1〜θ5,Sに基づき地球上の車両5の配置を算出し、これと塗装領域の情報に基づき塗装領域に対する車両5の配置を制御する。測距装置から取得した距離情報F,L,R,H1,H2、塗装領域の情報及びアーム6の姿勢情報に基づきアーム6及びヘッド7の動作を制御して被塗装面に対する塗装工程を行わせる。
(もっと読む)
ダイカストマシンのスプレー装置
【課題】
スプレーノズルのサイクル時間が短くなるようにスプレーノズルの移動工程を設定し、生産の向上を図る。
【解決手段】
ダイカストマシン11の型開きからスプレーノズル10Aの噴射動作に至る待機位置aから噴射位置cに至るスプレーノズル10Aの移動工程と、噴射位置cから待機位置aへと戻る移動工程とが異なり、戻る移動工程において、キャビティ12の深さに相当する距離L1だけスプレーノズル10Aを後退(水平前進工程W2の移動距離分)させた後、スプレーノズル10Aを追い込み移動工程W3の移動距離と同じ距離だけ戻るように後退しながら上昇させることによって、スプレーノズル10aは傾斜した移動軌跡を描いて上昇し、キャビティ12の外側へと最短距離で移動する。
(もっと読む)
1 - 12 / 12
[ Back to top ]