
Fターム[4E065CB00]の内容
スポット溶接 (796) | 溶接機の移動・位置決め (33)
Fターム[4E065CB00]の下位に属するFターム
Fターム[4E065CB00]に分類される特許
1 - 2 / 2
スポット溶接装置
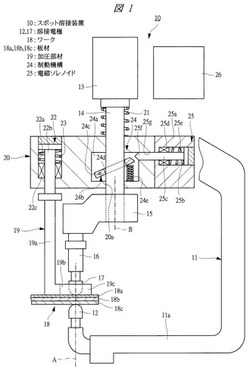
【課題】溶接電極の加圧方向において、溶接電極の先端と加圧部材の先端との相対的な位置を調整することのできるスポット溶接装置を提供する。
【解決手段】複数の板材18a,18b,18cを重ねたワーク18を両側から把持して加圧する一対の溶接電極12,17と、溶接電極17の加圧力により板材18aが変形することを抑制するために、板材18aを加圧する加圧部材19とを有し、一対の溶接電極12,17に電流を流してナゲットを形成することにより、板材18a,18b,18c同士を相互に接合するスポット溶接装置10であって、一対の溶接電極12,17の加圧方向における溶接電極17の先端と加圧部材19の先端との位置を調整する制動機構24および電磁ソレノイド25が設けられている。
(もっと読む)
学習制御機能を備えたスポット溶接ロボット

【課題】従来のスポット溶接ロボットは、ロボットの高速動作によって発生する軌跡誤差や振動成分によって、ロボットの最適動作が阻害されるという問題があった。
【解決手段】本発明のスポット溶接ロボットは、制御対象部位とセンサとを備えたロボット機構部(1)と、制御対象部位の目標軌跡または目標位置に関する位置指令データを取得し、位置偏差データに従って、ロボット機構部を所定の動作速度で動作させる動作制御部(4)と、センサの検出結果から制御対象部位の軌跡または位置を算出し、軌跡誤差または位置誤差を補正するための、もしくは振動を抑制するための、学習補正量を算出する学習制御部(3)と、を有し、動作制御部は、学習補正量を用いて位置偏差データを補正し、学習制御部は、学習補正量を算出する過程で、最大動作速度に至るまで1回又は複数回に渡って動作速度を増加させながら学習補正量を算出する、ことを特徴とする。
(もっと読む)
1 - 2 / 2
[ Back to top ]