
Fターム[4E081AA15]の内容
突合せ溶接及び特定物品の溶接 (6,374) | 目的、効果(突合せ溶接) (656) | 能率向上と省力化 (194) | 溶接(施工)の機械化、自動化 (54)
Fターム[4E081AA15]に分類される特許
1 - 20 / 54
溶接装置
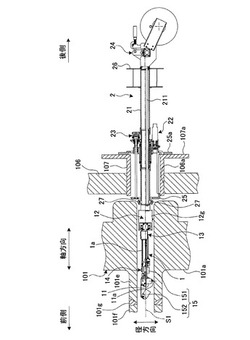
【課題】比較的細径の管内部の溶接を行うことのできる溶接装置を提供すること。
【解決手段】管の内部に挿入される挿入部1と、管の外部に配置されて挿入部1を管の内部に配置する非挿入部2と、挿入部1に設けられ、管の内部に配置された状態で管の内面に溶接を行う溶接トーチ11と、挿入部1に設けられ、溶接トーチ11の先端部11aが向く管の径方向に溶接トーチ11を移動させる溶接トーチ移動機構12と、非挿入部2に設けられ、先端に挿入部1が取り付けられて管に挿入される支持ロッド21を、当該支持ロッド21の軸S1廻りに回転移動させる回転移動機構22と、非挿入部2に設けられ、支持ロッド21を、当該支持ロッド21の軸S1の延在方向に沿って移動させる軸方向移動機構23と、非挿入部2に設けられ、溶接トーチ11に至り溶接ワイヤを供給する溶接ワイヤ供給機構24と、を備える。
(もっと読む)
スタブ管溶接ヘッド

【課題】スタブ管をヘッダ管に溶接することができ、かつ溶接ヘッドを溶接線に直交する方向に往復動するウィービング動作が可能であるスタブ管溶接ヘッドを提供する。
【解決手段】対象物に一端が固定されたスタブ管1の端部全周を溶接するためのスタブ管溶接ヘッド10であって、スタブ管の軸線が仮想軸線3上に位置する場合に、スタブ管を間隔を隔てて囲む第1開口22と第1開口と外部空間とを連通しスタブ管が通過可能な第1スロット24とを有するヘッド本体20と、ヘッド本体に仮想軸線3を中心に旋回駆動可能に取り付けられ、第1開口と整合してスタブ管を間隔を隔てて囲む第2開口32と第2開口と外部空間とを連通しスタブ管が通過可能な第2スロット34とを有する旋回部材30と、旋回部材に仮想軸線3に対して半径方向に揺動駆動可能に取り付けられた溶接トーチ40とを備える。
(もっと読む)
溶接方法及び溶接装置
【課題】本発明は、溶接の終始端部ができるだけ少なくなるよう、少ない分割数で管台を原子炉容器の傾斜面に取り付ける溶接方法を提供することを目的とする。
【解決手段】水平方向に対して傾斜した傾斜面6を備えた容器の該傾斜面6に設けられた鉛直方向に貫通する貫通孔と、該貫通孔に挿入された管状部材3と、の接合部を溶接する溶接方法であって、先端が一方向に傾斜し、且つ、先端の突先部5が周上にある電極4を備える溶接トーチ2を、突先部5を含む母線が傾斜面側に向くよう鉛直配置し、突先部5を含む母線が傾斜面側に向いた状態を維持しながら、管状部材3の円周に沿って傾斜上側から傾斜下側に向けて溶接ビードを形成する溶接方法。
(もっと読む)
自動溶接システムおよび自動溶接方法
【課題】作業時間の短縮を図るとともに、溶接品質を維持することのできる自動溶接システムを提供する。
【解決手段】予め、開先形状等に係る情報等に基づいて、各層毎のトーチ基準位置や基準供給電力等を演算する。溶接対象ワーク1を回転テーブル11に載置する。回転テーブル11を一回転させ、位置検出センサ18により距離R0(θ)を検出し、距離R1(θ),距離R2(θ)を演算する。位置検出終了後、溶接トーチ21,31を配置する。回転テーブル11を回転させ、R1,R2に基づいた径方向位置制御および溶接ビード断面均一維持制御をおこないながら溶接する。回転テーブル11が一回転すると、1層目の溶接が完了し、2層目の溶接を開始する。このように複数層の溶接を繰り返して開先深さまで埋まることにより、第1溶接位置において内輪2と静翼リング3とを接合し、同時に、第2溶接位置において静翼リング3と外輪4とを接合する。
(もっと読む)
溶接ロボットシステム
【課題】非接触式センサの溶接部位検出器を使用せずにギャップ長を算出することができる溶接ロボットシステムを提供する。
【解決手段】本発明の溶接ロボットシステムは、スポット溶接ロボットSRの上部電極基準位置算出回路4が、スポット溶接を行う前に上部電極1aを下部電極1bに接触させたときの上部電極基準位置を算出し、ギャップ長検出時上部電極位置算出回路5が、下部電極1bの上に母材Wを置いてスポット溶接を行うときに、上部電極1aを母材Wに接触させたときのギャップ長検出時上部電極位置を算出し、ギャップ長算出回路10が板厚と上部電極基準位置とギャップ長検出時上部電極位置とからギャップ長GLを算出し、スポット溶接を行う。アーク溶接ロボットARがギャップ長GLに対応して溶接条件を変更してアーク溶接を行う。仮付けと同時にギャップ長GLを算出することができる。
(もっと読む)
溶接用治具
【課題】第1の管材の一端面と、第2の管材の一端面とを溶接接合する際の作業能率を向上させることができ、設備を削減することができるとともに、作業スペースの限られた工場等でも採用することができる溶接用治具を提供すること。
【解決手段】第1の管材11の一端面と、第2の管材12の一端面とを、周方向に沿って本溶接する際に用いられる溶接用治具10であって、ポジショナ21を構成する回転板22に固定されて、回転板22の回転軸線Cまわりに回転板22とともに回転するベースプレート13と、ベースプレート13から、回転軸線Cと平行になるとともに、回転板22と反対の側に延びるアーム14と、アーム14の先端部に固定されて、第1の管材11の他端部を支持するクランプ15と、を備えているとともに、クランプ15に支持された第1の管材11の長手方向軸線と、回転軸線Cとが一致するように構成されている。
(もっと読む)
溶接装置および溶接方法
【課題】施工にかかる手間を削減して、円筒部材を金属板上に迅速かつ簡易に溶接することが可能な溶接装置および溶接方法を提供することを目的とする。
【解決手段】本発明に係る溶接装置1は、ラッシングポット32を甲板30上に溶接する溶接装置1であって、ラッシングポット32の端部を甲板30に溶接するトーチ40と、ラッシングポット32の外周面に当接する当接部4と、トーチ40と当接部4とが設置される本体部2と、本体部2に設けられ、当接部4が常にラッシングポット32の外周面に当接するように、本体部2をラッシングポット32の外周面に沿って回転させるタイヤ3とを備える。
(もっと読む)
円筒部溶接形成方法および溶接装置
【課題】圧力容器の外周面に円筒部を形成する際に、効率良く肉盛溶接を行うことができる円筒部溶接形成方法および溶接装置を提供する。
【解決手段】圧力容器の外周面から突出する円筒部を、肉盛溶接により形成する円筒部溶接形成方法であって、形成される円筒部の軸方向は、円筒部の突出方向となっており、形成される円筒部の軸を中心として、円筒部の周方向に周回させながら、円筒部の径方向に移動させることで、圧力容器の外周面に渦巻状に肉盛溶接を行う渦巻肉盛溶接工程を備えた。
(もっと読む)
隅肉自動溶接装置及び隅肉自動溶接方法
【課題】特定の環境に限らず隅肉溶接範囲の始端や終端を確実に検出することができるようにすること。
【解決手段】板材A上を走行する台車3を有する溶接装置1に、板材Aと隅肉溶接する板材B上を転動するガイドローラ3h,3iの近傍に近接センサ3j、3kを設ける。また、台車3が走行する板材Aを検出する近接センサ3p,3qを台車3の側面3l,3mにそれぞれ設ける。各近接センサ3j,3k,3p,3qに、磁性体製の板材を検出する渦電流式センサを用いる。近接センサ3p,3qのどちらかが板材Aを検出しなくなるか、あるいは、近接センサ3j,3kのどちらかが板材Bを検出しなくなると、溶接トーチ5による溶接を停止する。但し、近接センサ3p,3qが共に板材Aを検出している間は、台車3の走行を継続させる。
(もっと読む)
サブマージアーク溶接装置および片面溶接装置
【課題】溶接の状況と装置の状況を同時に記録することにより、溶接不具合の原因の追跡および解析が容易となるサブマージアーク溶接装置および片面溶接装置を提供する。
【解決手段】サブマージアーク溶接装置は、溶接トーチ25と、溶接走行台車20と、走行レール10と、溶接電源27と、センサ26と、溶接制御手段21と、走行駆動手段22と、倣い駆動手段23とを備え、溶接制御手段21が、走行駆動手段22に対して溶接走行台車20の開先長さ方向への駆動を指示するとともに、センサ26が検出した開先位置に従って倣い駆動手段23に対して溶接走行台車20の開先幅方向への駆動を指示する駆動指示部212と、走行距離と溶接電流および溶接電圧の測定値とを関連付けて書き込むとともに、走行距離と倣い位置とを関連付けて書き込む書き込み部215と、を備える。
(もっと読む)
固定構造及び管端溶接装置
【課題】管の固定時における管の軸線方向への移動を防止し、もって管の端部を管板に管端溶接する際の作業性を向上させる。
【解決手段】管の内部に挿入され、管の軸線方向に移動自在な移動シャフト51と、移動シャフト51を囲んで設けられ拡径自在なスリーブ52と、移動シャフト51に一体的に設けられ、スリーブ52の一端52a側から他端52b側に向かう移動シャフト51の移動により、スリーブ52を拡径させるスリーブ拡径部53と、スリーブ52の他端52bに当接され、スリーブ拡径部53の相対移動によるスリーブ52の軸線方向への移動を阻止する移動阻止部54とを備える。
(もっと読む)
構造物の溶接方法及び構造物の溶接設備
【課題】溶接時における作業者の負担を軽減するとともに、溶接に要する時間を短縮すること。
【解決手段】第1の部材が取り付けられた板材に、前記第1の部材と交差して第2の部材を配置する(ステップS101)。次に、前記第2の部材上に、昇降可能なトーチを有する溶接装置を載置する(ステップS102)。そして、前記第2の部材の長手方向に前記溶接装置を走行させて、前記板材に前記第2の部材を溶接する(ステップS103)。その後、前記トーチが前記第1の部材の位置に到達して前記第1の部材と干渉する前に、溶接を停止させるとともに、前記トーチを上昇させて前記第1の部材を回避させる(ステップS106)。
(もっと読む)
管用自動溶接装置
【課題】 溶接トーチの位置制御の制御ロジックを簡単にさせる。
【解決手段】 馬蹄型ガイド5に切欠部5aを越えて回転できるように保持させた切欠付リングギア6に、溶接トーチ14を取り付けて枝管溶接機4Aを形成する。多関節ロボット3Aのロボットアーム15における先端アーム部材16先端側の手首フランジ面18に、枝管溶接機4Aの馬蹄型ガイド5における切欠部5aとは反対側の端部を、取付ベース部材20を介して取り付ける。先端アーム部材16の先端側に突出する多関節ロボット3Aの手首軸17と、枝管溶接機4Aの切欠付リングギア6との間に、回転伝達手段19を備えて、管用自動溶接装置を形成する。多関節ロボット3Aに元来備わる手首軸17以外の各軸の制御機能と、手首軸17の制御機能により、枝管溶接機4Aの位置の制御と、その溶接トーチ14の円周動作の制御をそれぞれ行わせる。
(もっと読む)
条材隅肉溶接用倣いセンサー
【課題】溶接部からの熱影響によって故障することが少なく、かつ隅肉継ぎ手の隅角線の歪みを溶接点近傍で検知し、溶接トーチを隅角線に正確に倣わせることができる条材隅肉溶接用倣いセンサーの提供を目的とする。
【解決手段】本発明は組み合わせた複数の長尺板材の隅角線である溶接線を検出する条材隅肉溶接用倣いセンサーであって、センサー本体と、このセンサー本体に首振り自在に連結するアームベースと、溶接線を構成する一対の板材上の溶接点を挟む位置を長手方向に走行する一対の接触子と、二股に延出する一対の先端に上記一対の接触子が固定され、後端が上記アームベースに連結する支持部材と、センサー本体内に配設され、アームベースの首振り方向及びその角度を検出する溶接線検出手段とを備えることを特徴とする。
(もっと読む)
片面アーク溶接装置
【課題】片溶接欠陥が発生しないように溶接することができる片面アーク溶接装置を提供すること。
【解決手段】片面アーク溶接装置100は、溶接方向に延びる裏当部材21,22と、裏当部材21,22の側部にて裏当部材21,22の長手方向に配列され裏当部材21,22上に位置した被溶接鋼板1,2を磁気的に吸着する磁気吸着部材27〜29と、被溶接鋼板1,2の溶接線3に沿って移動し溶接ワイヤ5を送出する溶接トーチ4と、溶接ワイヤ5に電流を給電して溶接ワイヤ5と被溶接鋼板1,2との間にアークを生成するための溶接電源6と、を有する。溶接電源6は、溶接線3の溶接始端側に設置すると共に、各磁気吸着部材27〜29と溶接電源6の電源アース端子6bとを接続し、アース電流が、複数の磁気吸着部材27〜29と、溶接線3の溶接始端側から溶接終端側まで配置された架台フレーム101の溶接始端側と、を経由して溶接電源6に戻る。
(もっと読む)
自動溶接装置における溶接トーチ位置決め方法
【課題】 枝管が傾いていても、溶接個所に対する溶接トーチの角度を一定にする。
【解決手段】 ロボットハンド12の先端部の旋回台13に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付け、その反対側に探触子14を設ける。枝管溶接機4の溶接トーチ11の先端より突出する溶接ワイヤ15の先端を、現実の空間の或る1点に保持してロボットのマスタリングを行い、枝管溶接機4について、その点を原点Oとし且つ溶接トーチ11の円周動作の軸心位置に座標軸を備えたツール座標系16を設定する。ツール座標系16における溶接トーチ11の円周動作の軸心位置に対応する座標軸を、センシングにより検出された母管1に仮付けした枝管2の鉛直方向からの傾きに一致させる座標変換を行った後、馬蹄型ガイド5を溶接対象の枝管2に外嵌させて、溶接トーチ11の円周動作の軸心方向を、枝管2の軸心方向に一致させる。
(もっと読む)
タンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システム
【課題】アーク倣いを任意の回転中心で行った場合においても、先行極に位置ずれが発生せず、溶接欠陥が生じることのないタンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システムを提供する。
【解決手段】タンデムアーク溶接システムを制御するロボットコントローラ8は、先行極処理部11aが算出した先行極変化量から左右および上下方向の位置ずれを補正する先行極補正量を算出する先行極補正部14aと、後行極処理部11bが算出した後行極変化量から回転方向の位置ずれを補正する後行極補正量を算出する後行極補正部14bと、先行極2aの位置ずれを補正する回転中心補正量を算出する回転ずれ補正制御処理部16と、ティーチング位置と倣い補正時における溶接トーチ2の回転中心の位置を補正するロボット軌跡計画処理部13と、を備える。
(もっと読む)
ガスシールド溶接用の溶接トーチ及びガスシールド溶接方法
【課題】ガスシールド溶接で使用する溶接トーチの構造に関し、開先幅の制約を受けないで、開先の深い材料や開先が取られていない材料を最適な条件でガスシールド溶接を行うことができる単純な円形断面のガスノズルを備えた溶接トーチを得る。
【解決手段】
トーチ本体に対してトーチ軸方向に相対移動可能なガスノズルを備えている。ガスノズルは、トーチ軸方向のガイド筒に摺動自在に嵌挿して設けるか、軸方向に伸縮可能な蛇腹構造などにより、ノズル口が進退自在である。このガスノズルは、NC制御によりストローク制御可能なサーボシリンダなどの進退駆動装置に連結されて、ノズル口が移動及び位置決めされる。狭くて深い開先の底の部分を溶接するときは、ガスノズルを後退させ、ノズル口から溶接ワイヤを長く突出させた状態で溶接を行う。
(もっと読む)
グレーチングの枠材溶接装置
【課題】グレーチングの枠材溶接を両面同時に効率的かつ短時間で行うことができ、グレーチングに反りが生じてしまうことがないグレーチングの枠材溶接装置を提供する。
【解決手段】本発明のグレーチングの枠材溶接装置1は、両側に枠材54がそれぞれ仮固定されたグレーチング50を起立させた状態で両側から挟持可能な一対のグレーチング挟持手段2,3と、一対のグレーチング挟持手段2,3に沿ってそれぞれ昇降可能に設けられグレーチング挟持手段2,3により挟持されたグレーチング50を表裏からそれぞれ溶接するための一対の溶接トーチ4,5を備えた溶接トーチ移動体6a,6b,7a,7bとを有している。グレーチング50の表裏両面側から4点の溶接点を同時に溶接するため、グレーチングの枠材溶接を効率的かつ短時間で行うことができると共に、グレーチングに反りが生じることがない。
(もっと読む)
自動溶接装置
【課題】 枝管と母管の溶接個所を溶接トーチで正確に溶接する。
【解決手段】 ロボットハンド12の先端部の旋回台13に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付け、その反対側に探触子14を設ける。ロボットコントローラ19に、探触子14に接続したタッチセンサ16の接触検出信号を入力可能とし、更に外部の制御装置20を接続する。ロボットコントローラ19で多関節ロボットを制御して枝管溶接機4の馬蹄型ガイド5を溶接対象の枝管2aに外嵌させるときに、制御装置20により、馬蹄型ガイド5と予め探触子14で検出した溶接対象の枝管2aの位置のずれ量を求め、このずれ量を解消するための馬蹄型ガイド5の位置補正量を求めてロボットコントローラ19へ与えることで、馬蹄型ガイド5を外嵌させた溶接対象の枝管2aを、溶接トーチ11の円周動作の軌道の中心に配置させる。
(もっと読む)
1 - 20 / 54
[ Back to top ]