
Fターム[4E082EB07]の内容
Fターム[4E082EB07]に分類される特許
1 - 1 / 1
溶接ロボット制御システム
【課題】 アーク溶接時のリトラクトスタート制御をスムーズにかつ良好に行うことのできる溶接ロボット制御システムを提供する。
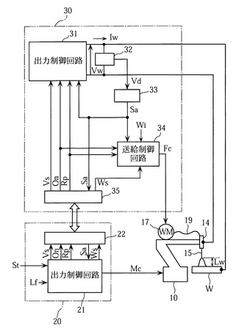
【解決手段】 本発明の溶接ロボット制御システムは、溶接ワイヤ15をワークWに一旦接触させ、両者を離間させた後に、溶接ワイヤ15とワークWとの間にアークを発生させて溶接を行うものであって、溶接ワイヤ15を送給することにより溶接ワイヤ15をワークWに向けて移動させるワイヤ送給装置16と、溶接ワイヤ15を所定の溶接位置に導く溶接トーチ14をワークWから離間させる方向に移動させるロボット制御装置20とを備え、ロボット制御装置20は、ワイヤ送給装置16によって溶接ワイヤ15を送給させることにより、アークの発生が開始される溶接トーチ14の溶接開始位置Spから溶接ワイヤ15とワークWとが接触する接触位置に溶接ワイヤ15をワークWに向けて移動させ、ロボット制御装置20によって溶接トーチ14を移動させることにより、溶接ワイヤ15を接触位置から溶接開始位置Spに移動させる。
(もっと読む)
1 - 1 / 1
[ Back to top ]