
Fターム[4E089EA05]の内容
Fターム[4E089EA05]の下位に属するFターム
Fターム[4E089EA05]に分類される特許
1 - 4 / 4
板材レポジション位置決定装置および決定プログラム
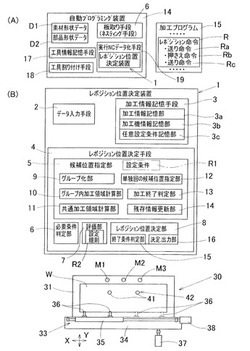
【課題】 与えられた加工データに対して、効率の良い加工が行える適切なレポジション位置が決定できる板材レポジション位置決定装置および決定プログラムを提供する。
【解決手段】 このレポジション位置決定装置1は、レポジション位置とする複数の候補位置を順次指定する候補位置指定部5と、指定された候補位置が設定必要条件を充足するか否かを判定する必要条件判定部6とを有する。必要条件を充足すると判定された候補位置につき評価する評価部7と、探索終了条件に達するまで候補位置の指定および評価を行わせ、最も評価値の高い候補位置を押さえ位置として決定し出力するレポジション位置決定部8を有する。候補位置指定部5は、加工ヘッドM1〜M3毎に加工をグループ化し、メイン加工ヘッドM1に対する処理で済むようにする。
(もっと読む)
スライド駆動装置

【課題】複数のスライド部が同期してスライド駆動可能なスライド駆動装置を提供する。
【解決手段】スライド駆動装置1では、可動プレート106とスライドブロック11におけるフランジ113、114との間にワイヤ131、132が張設されている。また、可動プレート106とスライドブロック12におけるフランジ123、124との間にワイヤ141、142が張設されている。ワイヤ131、132、141、142は、プーリ151〜153、161〜163などを介して張設されている。可動プレート106が一の方向に移動するとき、ワイヤ131、141およびワイヤ132、142の一方に引っ張り力が作用し、他方が送出されることにより、可動プレート106の移動量に応じたストロークをもってスライドブロック11、12がY軸方向にスライドする。
(もっと読む)
サーボプレス設備とその制御方法
【課題】サーボプレス装置にワークを搬入・搬出する搬送装置を付設する場合において、サーボプレス装置の作動位置及び作動速度の影響を受けることなく、サーボプレス装置と搬送装置を同期させてそれらの衝突(干渉)を回避することができるサーボプレス設備とその制御方法を提供する。
【解決手段】サーボモータでスライドを駆動するサーボプレス装置10と、サーボプレス装置にワークを搬入及び/又は搬出する搬送装置20,30とを備えたサーボプレス設備の制御方法。サーボプレス装置と搬送装置の希望運転状態に応じて、時間的に変化するマスター信号1を発生させるマスター信号発生ステップS1と、マスター信号値1の変化に同期してサーボプレス装置のスライド位置の指令値を一義的に出力するサーボプレス制御ステップS2と、マスター信号値1の変化に同期して搬送装置の作動位置の指令値を一義的に出力する搬送制御ステップS3とを有する。
(もっと読む)
チェンジャー付き加工設備制御システム
【課題】 スケジュールに応じた動作のための工具ホルダ交換命令を容易に付加することができる制御システムの提供。
【解決手段】 複数の工具8を搭載した複数の工具ホルダ7を交換可能に装備するパンチプレス1と、機外工具ホルダマガジン6と、この機外工具ホルダマガジン6とパンチプレス1との間で工具ホルダ7を自動交換する工具ホルダチェンジャー3とを備え、パンチプレス1を加工プログラム36に従って制御する加工機制御装置31と、工具ホルダチェンジャー3をプログラム制御するチェンジャー制御装置32と、加工プログラム36Aを記憶したスケジュール作成装置34とを備える。スケジュール作成装置36は、元の加工プログラム36Aに工具ホルダ交換命令52およびオフセット命令51Aを付加する命令付加手段59と、付加した加工プログラム36を加工機制御装置31に送る加工プログラム転送手段60とを備える。
(もっと読む)
1 - 4 / 4
[ Back to top ]