
Fターム[4F035BA23]の内容
噴霧制御装置 (2,732) | 噴霧物質の放出の制御 (361) | その他の放出制御 (116) | 放出パターンの制御 (27)
Fターム[4F035BA23]に分類される特許
1 - 20 / 27
静電噴霧装置
【課題】噴霧動作の開始時に清浄な液体を使用者に向かって噴霧できる静電噴霧装置を提供する。
【解決手段】ノズル(72)と、該ノズル(72)と内部が連通して液体が貯留される密閉状の容器(71)と、該容器(71)の内部を昇圧させる加圧機構(41)と、該ノズル(72)の先端の液体を外部へ噴霧するように前記容器(71)内の液体に電圧を印加する電源(50)とを備えた静電噴霧装置であって、噴霧動作が終了して次の噴霧動作が開始される前に、前記ノズル(72)の先端の液体を除去するクリーニング動作を実行させる制御部(60)を備えている。
(もっと読む)
ハンドガン制御装置

【課題】塗料の物性に応じて塗料の霧化状態や噴射形状を調整する。
【解決手段】ハンドガン20はエアにより車両に塗料を吹付ける。塗装対象車両認識部41は車両に吹付ける塗料の物性を確認する。エア供給量記憶部42は塗料の物性とハンドガン20に供給するエアの量との関係を記憶する。エア供給量制御部43は塗装対象車両認識部41が確認した塗料の物性とエア供給量記憶部42が記憶する塗料の物性およびハンドガン20に供給するエアの量との関係から、ハンドガン20に供給するエアの量を制御する。
(もっと読む)
コンピュータプログラム、噴霧制御方法及び噴霧制御装置
【課題】複数のノズルを用いて異なる種類の溶液を精度良く噴霧することができ、厚さが均一な膜の生成を可能とするコンピュータプログラム、噴霧制御方法及び噴霧制御装置を提供する。
【解決手段】初期設定事項を受け付けて(S1)、各ノズルが移動すべき経路を作成して表示する(S2、S3)。どの溶液を噴霧するかを示すコマンド、ノズルの走査回数、溶液の吸着量のデータを受け付けて(S4)、それらを表示する(S5)。コマンドに対応するノズルに関わる間隔情報に基づいて、ノズル配置部が移動すべき補正経路を算出する(S6)。S4で受け付けたデータに基づき、S6で算出した補正経路にしたがって、噴霧部を動作させて、対応するノズルから溶液を噴霧する(S7)。
(もっと読む)
ロボット塗装システム及びこれを用いた塗装方法
【課題】被塗装対象に生じる塗装ムラの発生を抑制することができ、塗装のサイクルタイムを短縮することができるロボット塗装システム及びこれを用いた塗装方法を提供する。
【解決手段】ロボット塗装システムは、ロボット及び塗装治具を備えており、塗装治具は、フレーム部30、駆動源33及び複数の塗装ガン4を有している。複数の塗装ガン4A,4B,4Cは、それぞれ一定方向Eに広がる状態で塗料を噴射し、一定方向Eにおいて、塗料の噴射によって形成される中心塗膜層71の両側に、中心塗膜層71よりも塗膜が薄いダスト塗膜層72を形成する。駆動源33は、フレーム部30の形成状態を、複数の塗装ガン4A,4B,4Cが直交方向Wに対して傾斜する右斜め方向に並ぶ第1塗装状態と、複数の塗装ガン4A,4B,4Cが直交方向Wに対して傾斜する左斜め方向に並ぶ第2塗装状態とに可変させるよう構成されている。
(もっと読む)
ペースト塗布装置及びペースト塗布方法
【課題】閉環状のペーストパターンにおける接続部分の形状を安定させる。
【解決手段】ペースト塗布装置1は、塗布対象物Kの表面に向けてペースト材を吐出する吐出部4と、塗布対象物Kと吐出部4とを塗布対象物Kの表面に沿って相対移動させる駆動部3と、塗布対象物Kの表面にペースト材を閉環状に塗布するように吐出部4及び駆動部3を制御する制御装置7と、吐出部4により吐出されて塗布対象物Kの表面に塗布されたペースト材の塗布始点を検出する検出部6とを備え、制御装置7は、ペースト材の吐出中に検出部6により検出された塗布始点に応じて、ペースト材の塗布終了動作開始点を設定する。
(もっと読む)
塗装ガン
【課題】機能性及び利便性の高い塗装ガンを提供する。
【解決手段】ガン本体1の先端部1aに形成した向きが互いに異なる複数のノズル取付面部4a,4bに、塗料ノズル2を取り付ける複数のノズル固定部5a,5bを設け、各ノズル固定部5a,5bに設けた塗料ノズル2への塗料送出口7のうち塗料送出状態とするものを択一的に切り換える切換手段18を設ける。
(もっと読む)
流体輸送を制御するシステム及び方法
可動式流体輸送機(106)を使用して現場(100)に流体を輸送するシステム及び方法が開示される。本方法は、現場での可動式流体輸送機の位置を特定すること、及び現場に関連する情報を使用して、可動式流体輸送機の位置に基づいて流体輸送率を決定することを含む。本方法は、決定された流体輸送率で、可動式流体輸送機の位置での現場表面に流体を輸送することをさらに含む。 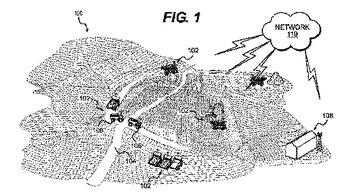 (もっと読む)
(もっと読む)
液体塗布装置、及び液体塗布方法
【課題】塗布を行うまでに必要な事前の処理時間を短縮し、かつ作業ミスをなくして、ワークの様々な種類または様々な塗布形状に対し信頼性が高い塗布を実現する。
【解決手段】本発明は、ワーク10に対しインクを塗布するインク塗布動作部100を備えた液体塗布装置であって、異なる塗布パターンが設定された、複数の塗布マップを記憶するマップ記憶手段15と、複数の塗布マップから1つの塗布マップを選択し、当該塗布マップにおける塗布パターンに従った塗布の実行を、インク塗布動作部100へ指令する塗布実行手段13とを備えている。
(もっと読む)
塗装システム
【課題】車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。このため、塗装ロボット14a〜14dとオープナーロボット16との間には、高低差が存在する。また、オープナーロボット16のアーム部40の先端には、柱状部の先端から互いに逆方向に分岐して延在する第1爪部及び第2爪部を有する略逆T字形状のフック48が設けられる。
(もっと読む)
ソレノイド駆動装置及び吐水装置
【課題】洗浄水のコントロール性とプランジャーの応答性を高めたソレノイド駆動装置及び洗浄性能を改善した吐水装置を提供する。
【解決手段】電源の正側に一端が接続された第一のスイッチ手段と、前記第一のスイッチ手段の他端に一端が接続されたソレノイドと、前記ソレノイドの他端に一端が接続され他端が電源の負側に接続された第二のスイッチ手段と、前記電源の正側と前記電源の負側との間に接続された容量手段と、前記ソレノイドの一端と前記容量手段の負側との間に逆方向に接続された第一の整流ダイオードと、前記静電容量の正側と前記ソレノイドの他端との間に逆方向に接続された第二の整流ダイオードと、前記ソレノイドに通電中の電流を一定に維持する定電流回路と、を備えたことを特徴とするソレノイド駆動装置が提供される。
(もっと読む)
特に大規模構造物の部品の表面を円滑化する方法及び装置
【課題】本発明は特に大規模構造物の部品の表面を円滑化する方法及び装置を提供する。
【解決手段】本発明は、特に例えば船の船体のような大規模構造物の部品(3)の表面(2)を、次なる塗装のために円滑化する方法に関し、次の工程を有する:部品(3)の表面(2)の凹凸の計測;素材除去及び/又は均一化剤による素材塗布による凹凸の均一化;表面(2)の計測前に表面(2)の所定の位置に参照目印を付加し、表面(2)の凹凸の計測の間に参照目印を考慮に入れる。
(もっと読む)
スプレーロボットにおけるスプレー移動経路生成方法及びスプレー移動経路生成装置
【課題】スプレー塗布する位置等を基本条件として予め決定し、スプレー塗布の順序をこの基本条件に従って決定することで、入力する人によってスプレー塗布の動作経路にバラツキを発生することがなく、品質とサイクルタイムとにバラツキが発生することもない、最適なスプレー塗布の順序を決定するスプレー移動経路生成方法及びスプレー移動経路生成装置を提供する。
【解決手段】
任意のスプレー位置を選択するST15と、移動パターンを選択するST16と、移動パターンにおいて、送りピッチを設定するST19と、移動パターンの始端に対応するスプレー位置を最初のスプレー位置として選択するST20と、スプレー順序を決定するST21と、を実行することにある。
(もっと読む)
防除機の散布量制御装置及び散布量制御方法
【課題】散布ノズルを交換した場合に散布ノズルの特性情報の設定を作業現場で簡単に行うことができること、特性情報が未知の散布ノズルを採用する場合に信頼性の高い特性情報を得て、散布条件を広範囲に調整しながら精度の高い散布量制御を行うことができること。
【解決手段】散布条件の検出値が設定された目標値になるように検出値と散布ノズルの特性情報に基づいて散布量を制御する制御手段10を備え、制御手段10は、散布装置1に装備された圧力センサ21と流量センサ22の検出値に基づいて散布ノズルの特性情報を設定するノズル情報設定手段11を備え、ノズル情報設定手段11は、散布装置1の異なる作動状態で圧力センサ21と流量センサ22の検出値を同時に取得し、複数の作動状態で取得した圧力センサ21と流量センサ22の同時検出値によって散布ノズルの特性情報を設定する。
(もっと読む)
塗装機器および塗装方法
本発明は、塗装剤を用いて部品を塗装する、具体的には塗料を用いて車両部品を塗装する塗装機器および塗装方法に関連し、塗装剤を塗布する塗布装置を備える。本発明によれば、塗布装置は、少なくとも1つの塗装剤ノズルから塗装剤を吐出するプリントヘッド(8、9)である。 (もっと読む)
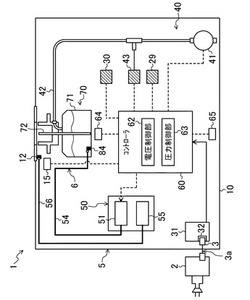
液体噴射装置、その制御方法
【課題】液体噴射装置において液体の噴射特性を制御する新規な技術を提供する。
【解決手段】噴射口と、液体を前記噴射口から噴射するポンプと、音を検出する検出手段と、前記検出手段によって検出された音の特徴を判定する判定手段と、前記音の特徴に応じて液体の噴射特性が変化するように前記噴射口及び前記ポンプのうちの少なくとも一方を制御する制御手段と、を備えることを特徴とする液体噴射装置を提供する。
(もっと読む)
噴射装置用アクチュエータキャップ
容器(36)用アクチュエータキャップ(10)は、第1端部及び第2端部を有する筐体(20)を含み、前記第1端部は、弁棒(144)を有する容器(36)上に保持されるように構成されている。導管(246)は、第1端部(248)及び第2端部(850)を含み、前記第2端部(250)近くの内部には、係合部材(508)が設けられている。前記係合部材(508)は、円形の放出オリフィス(178)を有する弁棒(174)からは流体が放出されないように且つ非円形の放出オリフィスを有する弁棒(174)からは流体が放出されるように構成されている。電磁弁(240)は、前記導管(246)の前記第1端部(248)及び前記筐体(20)の放出ノズル(256)と流体連通するように設けられている。  (もっと読む)
(もっと読む)
スプレーガン管路接続装置
本発明は、複数のホース(20)を管状ロボットアーム(14)の端部に接続するレーガンの管路接続装置に関する。開口板(42)がロボットフランジ(10)と中間体(6、4)との間に設けられる。該開口板は、ホース接続ブッシュ(32)を横断するように配置され、フランジ孔(30)の少なくとも幾つかと整列する複数の透孔(46)を有する。  (もっと読む)
(もっと読む)
噴霧媒体を使用する塗料噴霧装置を制御するための噴霧パラメータを決定するための方法
【課題】噴霧媒体を使用する塗料噴霧装置を制御するための噴霧パラメータを決定する。
【解決手段】第一の噴霧媒体を使用するための、既知の噴霧パラメータにより決定された既知の噴霧パターンが与えられ;前記の噴霧パラメータ及び第二の噴霧媒体の特性を用いて、暫定的な噴霧パターンが計算され;更なる噴霧パターンを与える変更された噴霧パラメータを取得するために、前記既知の噴霧パラメータが変更され;前記更なる噴霧パターンが、前記既知の噴霧パターンに、基準の範囲内で類似するポイントに達するまで、前記変更された噴霧パラメータが変更され;前記更なる噴霧パターンに対応する前記変更された噴霧パラメータが、前期第二の噴霧媒体のための噴霧パラメータとして意図され、前記第二の噴霧媒体が使用されるときにはいつでも、前記塗料噴霧装置に与えられ;前記噴霧パラメータは、前記塗料噴霧装置の噴霧挙動に影響を与える複数の空気の流量を有する。
(もっと読む)
物品上のプラズマ溶射皮膜多孔性を制御する方法及びシステム
【課題】ロボット溶射ガン組立体用の溶射被覆方法を提供する。
【解決手段】本溶射被覆方法は、被覆対象の物体(20)幾何学形状の離散化モデルをインポートする段階と、数値的に特性記述した溶射パターン(22)ファイルをインポートする段階と、複数の動作位置、滞留時間、及びロボット溶射ガンの溶射方向を定める配向を含むロボット動作ファイルをインポートする段階と、動作ファイル内の各動作位置を読み取る段階と、各動作位置において物体(20)幾何学形状のどの部分が通視可能であるかを判定する段階と、各動作位置についてのコア圧縮、ロボット溶射ガンの入射角、及び溶射の跳ね飛びに基づいて物体(20)幾何学形状の各通視可能部分において空隙容積率を算定する段階と、全動作ステップについて物体(20)幾何学形状の部分上の総皮膜厚さを計算する段階とを含む。
(もっと読む)
塗装装置
【課題】
エア霧化塗装のように吐出量を増やせば塗着効率が低下するような方法を用いて塗装する場合でも、円形又は環状塗装パターンで塗装でき、塗着効率を維持したまま、吐出量を増やして、生産効率を向上できるようにする。
【解決手段】
偏平噴霧パターン(F1〜F3)を有する複数の霧化機構(N1〜N3)を所定回転数で回転駆動される回転ベース(4)に取り付け、少なくとも一以上の霧化機構(N1)について、その偏平噴霧パターン(F1)の長径方向を回転ベース(4)の回転により形成される塗装パターン(P)の中心から外縁に向う径方向に沿わせて配した。
(もっと読む)
1 - 20 / 27
[ Back to top ]