
Fターム[4F035CB26]の内容
Fターム[4F035CB26]の下位に属するFターム
検出に基づくもの (14)
Fターム[4F035CB26]に分類される特許
1 - 17 / 17
眼鏡レンズ用塗布液塗布装置
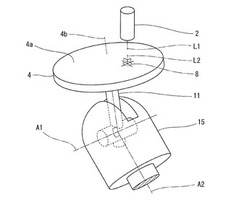
【課題】レンズ面に塗布液の層を厚みが薄くかつレンズ面の全域にわたって均等になるように形成できる眼鏡レンズ用塗布液塗布装置を提供する。
【解決手段】スプレーノズル2から塗布液を霧状に噴出させて眼鏡レンズ4のレンズ面4aに塗布する塗布液塗布部5を備える。塗布液塗布部5は、スプレーノズル2から噴出する噴霧の中心線L1がレンズ面4aの目標塗布位置8を通る法線L2と略一致するようにレンズ面4aをスプレーノズル2に対向させながら、眼鏡レンズ4をスプレーノズル2に対して移動させるものである。
(もっと読む)
ペースト塗布装置及びペースト塗布方法

【課題】閉環状のペーストパターンにおける接続部分の形状を安定させる。
【解決手段】ペースト塗布装置1は、塗布対象物Kの表面に向けてペースト材を吐出する吐出部4と、塗布対象物Kと吐出部4とを塗布対象物Kの表面に沿って相対移動させる駆動部3と、塗布対象物Kの表面にペースト材を閉環状に塗布するように吐出部4及び駆動部3を制御する制御装置7と、吐出部4により吐出されて塗布対象物Kの表面に塗布されたペースト材の塗布始点を検出する検出部6とを備え、制御装置7は、ペースト材の吐出中に検出部6により検出された塗布始点に応じて、ペースト材の塗布終了動作開始点を設定する。
(もっと読む)
塗装用吹付処理装置
【課題】塗装用吹付処理装置による被塗物処理の処理品質を向上させる。
【解決手段】搬送機22が保持する被塗物Wを搬送機Wに対して移動動作させる被塗物動作手段32,61を搬送機22に装備し、この被塗物動作手段32,61を制御して被塗物Wを搬送機22に対し移動動作させることにより、吹付処理域Sでの被塗物Wに対する噴出流体Fの吹き付けにおいて、噴出手段Nとその噴出手段Nによる噴出流体Fが吹き付けられる被塗物上の被吹付部との距離である吹付距離d、又は、噴出手段Nからの流体噴出向きに対する被吹付部の向きである吹付向きαを調整する吹付制御手段CCを設ける。
(もっと読む)
車体位置決めシステム及び塗布ステーション
【課題】車体の床下部の塗装に必要な空間を確保するために車体を台車から持上げるリフトアップ機能と、当該塗装を実施する目標位置に車体を位置決めする位置決め機能と、を併せ持つ車体位置決めシステム及びそれを適用した塗布ステーションの構成及び制御の簡略化並びに所要タイムの短縮化を図る。
【解決手段】位置決め制御装置180は、所定の停止位置に台車が停止した状態における車体の床下部の下方に配置され、先端に基準ピンを取り付けた支持ロッドを車体の長さ方向、幅方向、及び高さ方向の3軸方向に移動させる位置決め装置100a〜100dに対して、台車に載置した車体の四隅の床下部にある基準穴に基準ピンを嵌合させ、車体を台車から持ち上げるとともに当該持上げられた車体の位置を目標位置に位置決めするように制御を行う。
(もっと読む)
塗装システム及び塗装システム運転方法
【課題】塗装システムの設備コスト及び運転コストを低減するとともに、省エネルギ化や二酸化炭素排出量の低減を効果的に達成する。
【解決手段】制御手段12による自動塗装において、被塗物Wを移動手段11により両側の塗装ロボット8のうちの一方側の塗装ロボットLa,Lbに近づけて他方側の塗装ロボットRa,Rbから遠ざけた一方寄り塗装位置Lsに移動させた状態で、それら一方側及び他方側の塗装ロボット8夫々を被塗物Wに対して塗装動作させる一方寄り塗装工程KLを実行し、その後、被塗物Wを移動手段11により他方側の塗装ロボットRa,Rbに近づけて一方側の塗装ロボットLa,Lbから遠ざけた他方寄り塗装位置Rsに移動させた状態で、それら一方側及び他方側の塗装ロボット8夫々を被塗物Wに対して塗装動作させる他方寄り塗装工程KRを実行する構成にする。
(もっと読む)
表面処理用自公転治具
【課題】 被処理物の一公転の間の自転回数を自在に変更可能で品位の高い表面処理を可能とし、かつ能率の良い表面処理を可能とすること。
【解決手段】 可動機枠1に直立状態で回転自在に配した公転軸2と、公転軸2の上部に着脱自在に配した公転用支持円板3と、公転軸2の昇降途中で離脱させた公転用支持円板3を、その位置とワーク着脱エリアとの間で移送可能に構成したコンベア装置10と、公転用支持円板3に公転軌道に沿って直立状態で自転可能に配した複数のワーク支持棒4、4…と、公転軸2を回転駆動すべく可動機枠1に配した公転軸用回転駆動機構5と、複数のワーク支持棒4、4…を自転動作させるべく可動機枠1に配したワーク支持棒用回転駆動機構6と、可動機枠1を昇降動作させるべくベース部7に配した昇降駆動機構8と、可動機枠1を昇降自在に支持するベース部7とで構成する。
(もっと読む)
塗布装置、レーザ加工装置および塗布制御装置
【課題】溶剤を被加工物に対して効率良く迅速に塗布することが可能な塗布装置を得ること。
【解決手段】塗布装置1において、外部装置によって被加工物の表面上で第1の加工が行われる加工領域を含む所定領域を所定の加工ブロックで分割するとともに分割に用いた各加工ブロックの領域を示す加工ブロック情報を抽出する領域設定部12と、外部装置によって加工領域内で第2の加工が行われる加工位置を示す加工位置情報および加工ブロック情報に基づいて、加工領域を含む所定領域の分割に用いた各加工ブロックの中から加工位置を含む加工ブロックを塗布対象のブロックとして抽出する塗布位置設定部13と、塗布対象ブロック抽出部が抽出した塗布対象のブロックに塗布剤を塗布する塗布部15と、を備える。
(もっと読む)
溶射皮膜形成方法および溶射皮膜形成装置
【課題】クランクシャフトの軸方向にシリンダボアが並ぶ少なくとも二つのシリンダ列のシリンダボアに対する溶射被膜の形成を、シリンダブロックの取付位置を変更することなく、同一の溶射ガンを用いて行えるようにする。
【解決手段】V型エンジンのシリンダブロック1を設置固定する回転部17は、凸状の円形曲面17bが回転受け台19の凹状の円形曲面19aに沿って回転する。この回転により、第1バンク7のシリンダボア3aと第2バンク9のシリンダボア3bとのいずれか一方の開口を、鉛直方向上方とすることができ、各シリンダボア3a,3bの内面に対し、同一の溶射ガン5を用いて溶射皮膜を形成できる。
(もっと読む)
塗装設備及びそれを用いた塗装方法
【課題】塗装用ロボットの数が少なくても所望の塗装を行うことができ、しかも塗装室を小型にすることができる塗装設備を提供すること。
【解決手段】本発明の塗装設備1は、塗装室2、ワーク揺動手段21、塗装機31、塗装用ロボット41等を備える。塗装室2には、ワーク支持体11により支持されたワークWが搬入される。ワーク揺動手段21は塗装室2に設置されている。ワーク揺動手段21は、塗装室2内に搬入されたワークWを、中心軸線C1を揺動中心としてワーク支持体11とともに揺動させる。塗装用ロボット41は、ロボットアーム42の先端に塗装機31を搭載している。塗装機31は揺動するワークWに対して塗料を吹き付ける。
(もっと読む)
少量排気自動塗装システム及び被塗装物フィーダー
【課題】
塗装室特にスプレー用塗装室は、塗料ミストを捕集し被塗装物等への不要な付着を避けるために室内の空気を常に吸引排気処理しているが、その排気のために室内の空調した空気が排気され、膨大なエネルギー損失になっている。塗料ミストの飛散する領域を限定し、ミスト捕集に必要な排気量を削減す。
【解決手段】
塗装室内に配置した被塗装物に対し、塗装ロボットに搭載されて作動するスプレーガンで塗装するにあたり、搬送装置のホルダーに載置された被塗装物の塗装面を、スプレーガンを移動させる代わりに、ホルダー側を前後や回転移動さらには傾斜移動等の手段で制御し塗装を行う。スプレーガンの操作信号と搬送装置のホルダーの駆動とは塗装ロボットの制御装置により任意の設定位置で相互に連動させることで、スプレーガンの吹付けを排気装置に向けて集中させ、小さく排気量の少ない塗装室での塗装が可能となる。
(もっと読む)
塗装機
【課題】被塗装物の下面に塗料が付着しないようにする。
【解決手段】複数の円板23が設けられた回転軸22を複数有し、回転軸22とともに円板23が回転することによって、円板23上に載置された被塗装物Wを搬送するコンベア10と、コンベア10の上方に設けられ、塗料を噴出する塗料ガン80と、円板23上に載置された被塗装物Wを円板23よりも上方へ上昇させるシリンダ(上下動部材54)と、円板23に対して設けられ、円板23を遮蔽しない非遮蔽位置と、円板23を遮蔽する遮蔽位置との間を変位可能なカバー30とを有する。
(もっと読む)
基板の洗浄装置
【課題】 基板が撓んだ場合であっても、洗浄効果を低下させることなく基板を洗浄できる基板の洗浄装置を提供すること。
【解決手段】 基板5を下方から支えるとともに略水平方向に搬送する搬送ローラ12が装着される搬送ローラ軸11の垂直上方に、この基板5の搬送方向に略直角な水平軸回りに前記搬送ローラ12の回転に同期して回転するノズル管13を設け、このノズル管13に基板5の表面に洗浄液を噴射して該基板の表面を洗浄する噴射ノズル14を備える。
(もっと読む)
モジュール式自動スプレーガン・マニホールド
モジュール式自動スプレーガン・マニホールドが提供される。本マニホールドは、互いから横方向に間隔を空けられた関係で列状に配置された複数のスプレーガン・モジュールを備えている。接合要素が、本マニホールドの上流端に配置される。第1支持アセンブリが、接合要素とスプレーガン・モジュール・アレイの中の第1スプレーガン・モジュールとの間に配置され、接合要素に対して第1スプレーガン・モジュールを支持する。第1支持アセンブリ内の流体導管が、接続要素の流体供給接続部および加圧空気供給接続部と連通している。第2支持アセンブリが、隣接のスプレーガン・モジュール対の間に配置され、これらのモジュールを支持する。各第2支持アセンブリは複数の流体導管を備えている。1つ以上の保持要素が、スプレーガン・モジュール、支持アセンブリおよび接合板を組み立てられた関係で固定する。 (もっと読む)
塗装装置、製造方法
【課題】塗装装置で複数のワーク毎に塗装を実施するにあたり、各ワークを搬送する搬送ロボットを干渉を発生させないように制御する。
【解決手段】ワーク受取場から塗装ブースへの投入動作、塗装中の支持動作、塗装後の塗装ブースからワーク引渡場への送出動作、及び、ワーク引渡場からワーク受取場への復帰動作からなる一連の動作を遂行する複数の搬送ロボット(例えばFr,Rr)と、各搬送ロボットの前記一連の動作を各動作シーケンスに従って制御する制御装置とを備える。各動作シーケンスは、ワーク受取場またはワーク引渡場において搬送ロボットとこの搬送ロボットに搬送されないワークとの干渉を防止する第1制御条件、及び、共にワークを保持した搬送ロボット同士の交差に起因する干渉を防止する第2制御条件を満たす位相ずれ関係を有する。
(もっと読む)
離型剤塗布装置
【課題】 型枠の大きさや配置パターンの異なる型枠設置台が順次搬送される状況において、それら型枠設置台の型枠にのみ離型剤を塗布する離型剤塗布装置を提供する。
【解決手段】 この離型剤塗布装置は、搬送中の型枠設置台(2)のIDタグ(11)に記録されている識別情報をIDリーダ(12)によって読み取って、その識別情報に対応する型枠配置情報を記憶手段から読み出し、型枠設置台(2)における型枠部分のみに離型剤を塗布するように、読み出した型枠配置情報に基づいて離型剤噴射器(10)(10)…を制御する。
(もっと読む)
積層体の製造装置および製造方法
【課題】 回転体表面に積層した積層体表面とオイルを出射する出射プレートとの間の距離を正確に測定することにより、積層体の特性を向上させることができる積層体の製造装置および製造方法を提供する。
【解決手段】 レーザーセンサからなる第1、第2の計測部14A、14Bにより、積層体表面までの距離と出射プレート13までの距離を測定し、その差を求めること、または、空気マイクロメータを備えた出射プレートプレートを用いることによって、回転体2の表面に積層した積層体表面と出射プレート13間の距離を正確に測定する。
(もっと読む)
懸吊式ワーク搬送装置
【課題】スペースの有効利用が図れるばかりでなく、エアシリンダや制御モーター、電子機器等のコストの嵩む機器の使用を削減し、シーケンス作業工程の自動化を経済的に行なうことができる懸吊式ワーク搬送装置を提供する。
【解決手段】 ハンガー2にキャッチングアーム53を設け、該アーム53を閉鎖方向に付勢するバネ55と、キャッチングアーム53を開放するキャッチングアーム開閉装置56を備える。ハンガー2には、これを横方向に回動する横方向回転ギア52と横方向転換装置51を設け、アーム53には、キャッチングハンド59を縦方向に回動する縦方向回転ギア61と縦方向転換装置60を設ける。ライン側には、アーム開閉装置56を作動する開閉ガイド58と、横方向回転ギア52を駆動するチェーン13と、横方向転換装置51を作動するガイド36、36と、縦方向回転ギア61を駆動するチェーン63と、縦方向転換装置60を作動する転換ガイド62を設ける。
(もっと読む)
1 - 17 / 17
[ Back to top ]