
Fターム[4F042DH00]の内容
塗布装置−一般、その他 (33,298) | その他の付属処理、補助装置 (1,332)
Fターム[4F042DH00]の下位に属するFターム
Fターム[4F042DH00]に分類される特許
1 - 12 / 12
プランジャ挿入装置、及び、プランジャ挿入装置用のアダプタ、並びに、シリンジユニットの製造方法
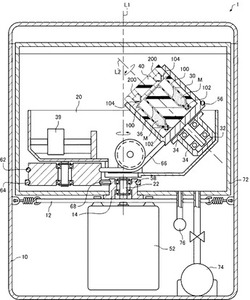
【課題】材料とプランジャとの間に気泡が混入しないように、シリンジ容器にプランジャを挿入するプランジャ挿入装置、及び、プランジャ挿入装置用のアダプタ、並びに、シリンジユニットの製造方法を提供する。
【解決手段】プランジャ挿入装置1は、材料Mを収納したシリンジ容器を保持し、シリンジ容器を、公転軸線(回転軸線L1)を中心に公転させる容器保持部30と、シリンジ容器の軸線上であって材料と公転軸線との間の領域にプランジャ200を保持し、プランジャを、公転軸線を中心に、シリンジ容器と同じ公転数で公転させるプランジャ保持部42と、シリンジ容器の材料よりも上の空間を減圧する減圧手段と、を含む。プランジャ保持部は、プランジャが所定値以上の公転数で公転したときに、遠心力の作用によりプランジャが脱落し、材料に向かって落下するように構成されている。
(もっと読む)
塗装治具及び塗装方法

【課題】塗装装置の変更を必要とせず、パネルの塗装ムラを抑制する。
【解決手段】塗装されるパネル12の搬送方向の前方に塗装治具10が設けられ、搬送ライン28、29をパネル12と一体となり搬送される。塗装治具10は側面視が三角形状とされ、塗装治具10の高さは搬送面からパネル12の塗装面までの高さ、長さは塗装治具10の先端部と液状塗料16の衝突により、上方からカーテン状に流下された液状塗料16の乱れが消滅した時点で、パネル12が液状塗料16を通過する長さとされている。斜面10Cは、塗装面12Uから搬送方向前方に向けて下り勾配とされている。搬送ライン28、29の接合部に設けられた塗装装置40を通過するときに、カーテンフローコーター14から、カーテン状に直下に流下された液状塗料16でパネル12の上面12U(塗装面)が塗装される。
(もっと読む)
塗装作業訓練装置
【課題】塗装ブース以外でもハンドガンの移動速度を習得し得るようにする。
【解決手段】塗装作業訓練装置1は、例えば被塗物側の軌跡に沿って配置されるチューブ2と、例えば塗装機側に配置されるハンドガン3とを備えている。チューブ2内には発光体4が水等の流体6と共に移動可能に収容されている。ハンドガン3には発光体4からの光を受光する受光器5が配設されている。チューブ2は、透明若しくは半透明のチューブから成り、当該チューブ2の一端部には、流体6を供給し、吸引するためのポンプが連結され、他端部には、流体6の供給と吸引に対応してスライド伸縮するバックが連結されている。
(もっと読む)
樹脂塗布方法及び樹脂塗布装置
【課題】本発明は樹脂内にボイドの発生を抑制しうる樹脂塗布方法および樹脂塗布装置に関し、塗布時間の短縮を図ることを課題とする。
【解決手段】低圧環境下の塗布チャンバ31Bで一番目の基板2に対してアンダーフィル材6を塗布する塗布工程と、搬送チャンバ31A内に次に処理される2番目の基板2を移動させた後に搬送チャンバ31A内を大気圧環境下から低圧環境に減圧する気圧調整工程と、前記塗布工程完了後に2枚目の基板2を塗布チャンバ31Bへ移動させ、1枚目の基板2を搬送チャンバ31Aへ移動させる移動工程とを有する。
(もっと読む)
ロール清掃装置
【課題】フイルム取扱ラインを停止させることなく、フイルム取扱ラインのワークロールを手拭きによらず自動的に清掃する。
【解決手段】平板なワーク材料を取り扱う取扱ラインにおいて、ワーク材料に接触回転するワークロールに付着した塵埃等をロール清掃装置によって自動的に拭き取る。ロール清掃装置には清掃布13をロール巻きにして装着し、送出装置14から巻取装置15へと送り出される過程において、清掃布13をワークロール11の周面12に押圧し、ワークロールの周面12に付着している塵埃等を拭き取る。清掃布をワークロールの周面12に押圧する押圧装置16は、清掃布をロール周面へと押し出すパッドヘッド17と、そのパッドヘッドをロール周面へと押し出すシリンダー18と、パッドヘッドをロール周面へと導くガイド19と、シリンダーを操作する駆動装置によって構成する。
(もっと読む)
塗布装置、および薄膜トランジスタの製造方法
【課題】大きな結晶の半導体層を基板の上に形成する塗布装置、および特性の優れた薄膜トランジスタを基板の上に形成する薄膜トランジスタの製造方法を提供する。
【解決手段】半導体材料を溶解または分散した半導体溶液の液滴を吐出する複数のノズルを備えたヘッドを移動させて該液滴を滴下し、基板の上に順次半導体溶液を塗布する塗布装置において、ヘッドは、ヘッドの基板と対向する面の、ノズル位置からヘッドの移動方向と反対側に離間した位置に、ヘッドと基板との間の空間を加熱する空間加熱手段を有することを特徴とする塗布装置。
(もっと読む)
塗工装置
【課題】塗工装置を固定する場合に、位置決めの精度を確実にすることができる塗工装置を提供する。
【解決手段】塗工装置本体12の上部から突出した左右一対の第1突部26,26を固定枠14にある左右一対のアーム46,46によって持ち上げ、塗工装置本体12の下部から突出した左右一対の第2突部28,28を固定枠14の左右一対の支持壁34,34に当接して、位置決めして固定する。
(もっと読む)
塗布ヘッドの組立装置及び装着方法
【課題】容易かつ迅速に塗布ヘッドの部品を組立台等に移載可能であり、しかも組み立てられた塗布ヘッドを容易かつ迅速に液体塗布装置に装着可能である塗布ヘッドの組立装置を提供する。
【解決手段】塗布ヘッドの組立装置であって、塗布ヘッド等の吊上げ用のクレーン2と、一方の塗布ヘッド片が載置される組立台70と、他方の塗布ヘッド片が載置される載置台54とを備え、組立台70は、一方の塗布ヘッド片を載置する際の第1ポジションと、組み立てられた塗布ヘッドを液体塗布装置に搬出する際の第2ポジションとに回動可能であり、塗布ヘッド組み立て後、組立台70を第2ポジションに回動させると、組立台70上の塗布ヘッドが液体塗布装置への装着に適した向きにむけられ、その状態でクレーン2で吊上げて装着可能である塗布ヘッドの組立装置である。
(もっと読む)
ヘッドユニットの組立方法および組立装置
【課題】機能液滴吐出ヘッドをヘッドプレートに接着固定するときに、外力が加わることのないヘッドユニットの組立方法および組立装置を提供する。
【解決手段】機能液滴吐出ヘッド3およびヘッドプレート4を磁性体で構成すると共に少なくとも一方を磁化する磁化工程と、磁化工程の後、機能液滴吐出ヘッド3をヘッドプレート4に磁着した状態で、ヘッドプレート4に対し機能液滴吐出ヘッド3を位置決めする位置決め工程と、位置決め工程の後、機能液滴吐出ヘッド3およびヘッドプレート4との隙間に接着剤を注入して、機能液滴吐出ヘッド3をヘッドプレート4に接着固定する固定工程と、固定工程の後、磁化工程で磁化した機能液滴吐出ヘッド3および/またはヘッドプレート4を脱磁する脱磁工程と、を有している。
(もっと読む)
塗布装置および磁気テープ製造装置
【課題】塗液の塗布むらの発生を低減し得る塗布装置を提供する。
【解決手段】樹脂フィルム201の移動に伴って回転させられつつ樹脂フィルム201をその外周面31aで支持するバックアップロール3と、バックアップロール3を回転可能に保持する固定台2と、バックアップロール3によって支持された状態で移動している樹脂フィルム201の表面に向けて塗膜形成用の塗液を押し出す押し出し部4とを備えて樹脂フィルム201の表面に塗液を塗布可能に構成され、押し出し部4には、バックアップロール3の表面領域のうちの平面視される領域Aのみを覆うカバー5が配設されている。
(もっと読む)
塗布装置
【課題】 異物の大きさに応じてスリットノズルの停止と異物の除去を振り分けることができる塗布装置を提供する。
【解決手段】 リニアモータを駆動して門型移動機構3を図中右方向に移動させつつスリットノズル14下端の吐出口からガラス基板W表面に塗布液を塗布する際に、走行方向前方にセンサ17が感知し得る径寸法の異物G1が基板W上に付着していると、センサ17はそれを感知した時点でリニアモータに停止信号を出力し、門型移動機構3の走行を直ちに停止する。一方、走行方向前方にセンサ17が感知し得ない径寸法の異物G2が基板W上に付着している場合には、リニアモータには停止信号が出力されないので、門型移動機構3はそのまま走行する。そして、異物G2はプロテクター15によって排除される。また、異物G2の寸法が極めて小さい場合にはプロテクター15によって排除できないが、この場合にはスリットノズル14を傷つけるおそれもない。
(もっと読む)
作業補助装置
【課題】 対象物に固定された基準点を目標軌道に直交する方向には蛇行させることなく目標軌道に沿って移動させる作業を容易する装置を提供する。
【解決手段】 作業補助装置10の移動機構11は塗布器具30と操作子18が配置されており操作子18に加える力に従って塗布器具30が移動する。塗布器具30の基準点PをワークW上の目標軌道Lに沿って移動させる際、コントローラ22は目標軌道Lに沿った仮想案内面40と仮想案内面上で第1側方42と第2側方44を設定する。基準点Pの仮想案内面への投影位置が目標軌道Lと一致するときに第1側方42から第2側方44へ向かう方向に大きな操作抵抗力FRを操作子18に発生させる。作業者は基準点Pを仮想案内面40に押し付けつつ目標軌道Lに沿って基準点Pを動かすように操作子18を操作する。基準点Pを目標軌道Lに直交する方向には蛇行させずに目標軌道Lに沿って移動させることができる。
(もっと読む)
1 - 12 / 12
[ Back to top ]