
Fターム[4L056BE05]の内容
Fターム[4L056BE05]の下位に属するFターム
ビルディングモーション (8)
チーズ (20)
コーン (11)
ガイドによるトラバース (8)
ロータリトラバース (3)
Fターム[4L056BE05]に分類される特許
1 - 14 / 14
紡績機及びつなぎ合わせ工程の前に紡績糸の端部を除去する方法
【課題】紡績糸の端部を除去可能な紡績機及びその除去方補を提供する
【解決手段】紡績機の紡績部(1)は、繊維材料(4)の引き入れ口(3)及び繊維材料(4)から製造された紡績糸(6)の引き出し口(5)を具備する紡績装置(2)、紡績装置(2)に繊維材料(4)を供給する供給装置(7)、製造した紡績糸(6)を巻き取る巻き取り装置(8)、及び紡績装置(2)の引き出し口(5)と巻き取り装置(8)との間に一部が設置され紡績糸(6)の端部を除去する紡績糸端部除去手段(9)を有する。紡績糸(6)の端部は、後段のつなぎ合わせ工程の前に、紡績糸端部除去手段(9)により、紡績糸(6)の端部が把持され、切断されて紡績糸(6)の残りの部分から分離され、紡績部(1)から除去される。
(もっと読む)
複数の作業箇所を備えた繊維機械、特にダブルワイヤ撚糸機又はケーブリング機

【課題】構造が単純で高いフレキシビリティを保証する、複数作業箇所を備えた繊維機械を提供する。
【解決手段】複数作業箇所を備えた繊維機械であって、各1つのフレームを有するダブルスピンドルユニットを有し、フレームが作業エレメント及び搬送エレメントを保持し、ダブルスピンドルユニットの2つの作業箇所の背側が互いに向かい合って配置され、各ダブルスピンドルユニット1が、真ん中に配置された1つの保持体2を有し、該保持体が、ダブルスピンドルユニット1の1つの作業箇所から他方の作業箇所に向かって延びる横ビーム20を有し、該横ビームが調整可能な足26を用いて土台に支持され、保持体2の中央に配置された中空成形体21が横ビーム20から鉛直方向に延び、中空成形体21が、パッケージ搬出装置31,33の受容及び巻取り装置3の固定のために構成されている。
(もっと読む)
空気紡績装置及び紡績機
【課題】旋回室内で繊維を高速に且つ安定して旋回させることが可能な空気紡績装置を提供する。
【解決手段】空気紡績装置は、中空ガイド軸体20と、ノズルブロック34と、を備える。中空ガイド軸体20は、その一部が旋回室内に位置している。ノズルブロック34には、旋回室が形成される。また、ノズルブロック34には、旋回室内に開口するノズル口27aから圧縮空気を噴射して旋回室内に旋回気流を発生させる4つの空気噴射ノズル27が形成される。旋回室は、直径D2が一定の略円筒形状として形成された円筒部を備える。また、当該旋回室の高さH1は、直径D2以下である。そして、当該旋回室の繊維送り方向下流側端部(A2の位置)の流路断面積は、前記ノズル口27aが形成された位置における旋回室の流路断面積よりも小さくなるように形成されている。
(もっと読む)
紡績機に用いられるドラフト機構
本発明は、紡績機であって、該紡績機のドラフト機構が、第1のボトムローラ(22)と、第1のトップローラ(21,41,71)とから成る第1のローラ対を備えたドラフト機構ユニット(35,65,95)を含み、該ドラフト機構ユニット(35,65,95)は構成アッセンブリとして形成されており、該構成アッセンブリは固定装置(11,59)を用いて紡績機に着脱自在に固定されている形式の紡績に関する。ドラフト機構ユニット(35,65,95)は有利には1つの紡出部のために設計されているか、または2つの隣接し合った紡出部のためのツインドラフト機構ユニットとして設計されている。このドラフト機構ユニットは、第1のローラ対と共にドラフト機構のドラフトゾーンを形成する別のローラをも有することができる。  (もっと読む)
(もっと読む)
精紡機に設けられたパッケージ交換装置
【課題】パッケージ交換の間の精紡機の休止時間を減少させることができ、これによって、精紡機の生産性を高めることができるようにする。
【解決手段】グリッパユニット15が、空の糸巻管7を収容するための第1のグリッパ13aと、満管の糸パッケージ17を収容するための第2のグリッパ13bとを有しているようにした。
(もっと読む)
繊維機械
【課題】各作業ユニットの状態を高精度に把握することが可能な繊維機械を提供すること。
【解決手段】自動ワインダの巻取ユニット2は、給糸ボビン4、巻取管7、糸継装置14、及び、毛羽伏せ装置13にそれぞれ設けられたICタグ40〜43から照合情報を取得し、その照合情報をユニットコントローラ32に送信するアンテナ35を備えている。そして、複数の巻取ユニット2を監視及び制御するホストコントローラ31は、アンテナ35で取得された情報に基づいて、各巻取ユニット2のICタグ40〜43が正規なものか否かを判断して、正規でない場合には、その巻取ユニット2に対して糸巻取処理を禁止する信号を出力する。
(もっと読む)
自動ワインダ
【課題】巻取ユニットに係る設定と、玉揚装置に係る設定と、の間の整合性を容易に確保できる自動ワインダを提供する。
【解決手段】複数で設けられ、給糸ボビンから解舒された紡績糸を紙管に巻き取って巻取パッケージを形成する巻取ユニット1・1・・・と、前記巻取ユニット1・1・・・の作動を制御する巻取ユニット制御部1Aと、前記複数の巻取ユニット1・1・・・に沿って走行する玉揚装置10・10と、前記玉揚装置10・10の作動を制御する玉揚装置制御部10Aと、を備える。更に、前記巻取ユニット制御部1Aによる前記巻取ユニット1・1・・・の作動の制御の設定と、前記玉揚装置制御部10Aによる前記玉揚装置10・10の作動の制御の設定と、を関連付けて記憶する関連記憶部32を備える。
(もっと読む)
撚糸巻取り装置
【課題】 撚糸機の、機構が、簡略化され、不要な駆動を省き、少エネルギー効果があり、小スペースにもつながる撚糸巻き取り装置の提供。
【解決手段】 撚糸された糸を、巻き取る時、フライヤー又は、リング及びトラベラーを、スピンドルに装着した、巻取りボビンの中心軸に対し、45度前後に装着する事により、撚りが掛かった糸は、送ら出された分、ボビンに巻きながら上下に振られ、随時巻かれる。
(もっと読む)
自動ワインダ
【課題】簡単な構成で迅速かつ的確に、満管パッケージとそれに関係した巻取ユニットとの対応関係を判別すると共に、その満管パッケージの重量を測定し、満管回転数を補正し得る自動ワインダを提供する。
【解決手段】パッケージPを回転させて糸Yを巻き取る複数の巻取ユニット2と、巻取ユニット2を制御し、予め設定された基準重量値に対応する回転総数までそのパッケージPを回転させて満管パッケージPを形成させる制御装置8と、巻取ユニット2において満管パッケージPが形成される毎に、その巻取ユニット2の位置まで移動して玉揚動作を行う玉揚装置6と、玉揚装置6に備えられ、玉揚動作の際に満管パッケージPの重量を測定する重量測定装置69と、を備え、制御装置8は、重量測定装置69による測定重量値と基準重量値とを比較し、それらに差があれば、その差に基づいて回転総数を補正し得るように構成した。
(もっと読む)
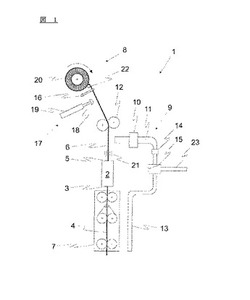
折畳み可能な糸ガイドから成るリング紡績機
【課題】
糸ガイド支持ロッドを上下動させる配列装置を利用し、その配列装置を設計してその配列装置自体がこの折畳みを組織するようにその配列装置の作動シーケンスを構成すること。
【解決手段】
この発明によると、カムローラー(20)がリング紡績機の糸ガイドロッド(8)を移動させる柔軟な牽引部材(12、14)の巻取りドラム(16)に設けられ、糸ガイドロッド(8)を揺動位置へ下降した後に揺動を自動化する。カムローラー(20)はそれ以上に後方へ旋回されるときに揺動レバー(21)に押圧し、揺動レバー(21)が連結ロッド(22)を介して揺動軸(23)を回転させる。糸ガイドロッド(8)に配置したクランクアーム(26)は糸ガイドロッド(8)が下降されるときにクランクピン(27)により摺動ガイドのアーム(25)へ係合し、摺動ガイドのアーム(25)が揺動軸上に配置されている。揺動軸(23)は糸ガイドロッドが回転されて糸ガイド(7)を揺動させる方向に摺動ガイドのアームを揺動させる方向に旋回される。 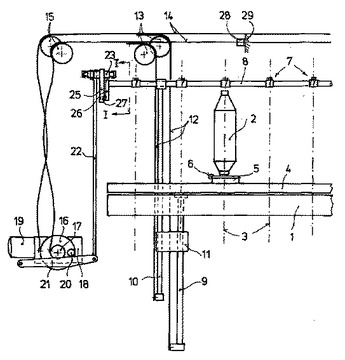 (もっと読む)
(もっと読む)
ループ形成紡績またはループ形成加撚のための機械のスイッチオンの方法
【課題】従来の不足を排除しかつループ形成紡績またはループ形成加撚のための機械のスイッチオンの運転確実な方法を提案する。
【解決手段】まず、バルーンリミッタとスピンドルとが回転開始し、該スピンドルが、バルーンリミッタ以前にスタートせず、スピンドルの回転開始時の瞬間回転速度が、多くとも一時的にバルーンリミッタの回転開始時の瞬間回転速度に合致し、その後、まだバルーンリミッタおよびスピンドルの定格回転速度への到達前に供給機構が回転開始し、これによって、糸結合体が、スピンドルのスタートと供給機構の定格速度との間の時間インターバルで、最終糸の公称撚りの許容可能な偏差よりも低い撚り数を達成するようにした。
(もっと読む)
コップの配向を検知するための装置
【課題】コップ、特に紡績コップの配向を検知するための装置であって、コップの光学的な走査を行なう装置と走査過程を評価するための評価装置とを有する装置を改善してその周期出力を高めることである。
【解決手段】本発明の課題は当該装置(12)がコップ搬送区間(9)の領域に、当該装置(12)を通過する、ほぼ長手方向に配向された紡績コップ(4)を区分的に走査できるように配置されておりかつ当該装置(12)が光源(17)、第1の円筒レンズ(20)、ギャップ絞り(22)、第2の円筒レンズ(30)、ミラーエレメント(27)並びにフォトセンサ(28)で装備されていることによって解決された。
(もっと読む)
巻取り装置の速度制御方法及び速度制御装置
【課題】線速度一定制御を行う巻取り装置において、安定した線速度一定制御を実現し、制御精度の要求を満足させる。
【解決手段】巻取り装置の速度制御装置は、速度センサ10の線速度検出値に対応する周波数検出値Fbと与えられた線速度指令値に対応する周波数指令値Finとが実質的に同一となるようにPID演算を行うPID演算部52と、電動機11の回転速度が低速になる程、PID演算結果が小さくなるように出力周波数Foutの大きさに依存してPID演算結果を補正するPID演算結果補正部54(前回周波数入力部60、減算部61、周波数依存演算部62、リミッタ部63、及び加算部64)とを有する。補正後のPID演算結果は、出力周波数Foutとして電動機11に出力される。
(もっと読む)
綿スライバを梱包するシステムおよび方法
【課題】 スライバの物理的一体性を維持する一方、輸送がスライバ用ケンス内で行われることを必要とせずに、圧縮状態における効率的輸送を許容すべくスライバを梱包するシステムおよび方法を提供する。
【解決手段】 たとえば綿、合成繊維または合成繊維配合物の繊維スライバを梱包するシステムおよび方法においては、スライバの積層物が投入載置され、投入載置されたスライバは頂部部材と底部部材との間で圧縮され、且つ、上記繊維積層物は上記頂部部材および底部部材と共にストラップ掛けされることで、ストラップ掛けされた繊維梱包物が形成される。
(もっと読む)
1 - 14 / 14
[ Back to top ]