
Fターム[4L056EA19]の内容
Fターム[4L056EA19]に分類される特許
1 - 14 / 14
紡績機及び紡績機における糸の製造を中断する方法

【課題】糸の製造の中断が制御された後に、糸の終端を迅速かつ容易に配置できる方法及び紡績機を提案する。
【解決手段】紡績機は、繊維材3の入口2と繊維材3からつくられた糸5の出口とを有する少なくとも1つの紡績部1と、配送装置6と、引き出す引出装置7と、巻き取り装置8と、少なくとも1つの糸のパラメータを監視する糸監視部9と、を有し、糸の製造は、監視される糸のパラメータについて目標位置から所定の乖離が検出されることにより、及び/又は巻き取り装置8のボビンの交換のために、及び/又は紡績機のスイッチオフの前に、中断され、配送装置6、引出装置7及び巻き取り装置8の送り速度は、糸の製造を中断するために、停止するまで徐々に低下させられ、その低下は、低下が完了した後に、製造された糸5の終端10が、紡績部1の出口4と巻き取り装置8との間に位置するように、設計された制御及び/又は調整装置を有する紡績機。
(もっと読む)
紡績機、巻取装置、及び繊維機械

【課題】回転体の周期的な異常を検出することができ、検出精度の向上を図ることが可能な紡績機、巻取装置、及び繊維機械を提供すること。
【解決手段】ドラフトする又は巻き取るための回転体を駆動するモータのトルク及び回転速度の少なくとも一方を監視し、この監視結果に基づいて、回転体の周期的な異常の有無を判定する構成とする。例えば、回転体の回転に伴って移動する繊維束に、周期的に太さが異なるなどの異常がある場合には、モータに作用する負荷トルクが変動したり、モータの回転速度が変動したりする。そのため、モータのトルク及び回転速度の少なくとも一方を監視することで、回転体の周期的な異常の有無を判定し、回転体によってドラフト又は巻き取られる繊維束の周期的な異常を検出することができる。
(もっと読む)
精紡機の管糸径推定装置及び管糸径推定方法
【課題】精紡機における管糸の最大径を推定できるようにする。
【解決手段】紡出されたボビンBの特定のボビン高さで実測された糸部径は、入力装置32によって制御装置25に入力される。制御装置25は、実測された糸部径と当該紡出時のリフティング動作条件とを用いて糸部径基本単位を算出し、算出した糸部径基本単位を当該紡出時の糸種条件と共に登録する。入力装置32により入力された糸種条件に合致する糸種条件が糸部径基本単位と共に前記登録手段に登録されている場合には、制御装置25は、入力された糸種条件に対応する前記糸部径基本単位及び入力された新たなリフティング動作条件を用いて最大管糸径を算出(推定)する。
(もっと読む)
紡績機
【課題】低い消費電力の紡績機を提供することにある。
【解決手段】スライバをドラフトして繊維束とし、この繊維束を紡績して糸を得る紡績ユニットと、前記紡績ユニットを制御する機台制御部と、を備える。機台制御部は、紡績ユニットの暖機対象部を選択的に作動させる暖機運転モードを実行する暖機運転モード実行部と、紡績ユニットに通常の紡績運転を実行させる通常運転モードを実行する通常運転モード実行部と、暖機運転モードと通常運転モードの何れかを選択する切替部と、を備える。
(もっと読む)
繊維機械
【課題】回転速度にかかわらず効率良く正確に電気モータを制御できる繊維機械を提供する。
【解決手段】自動ワインダは、モータ51と、位置センサ56と、電流センサ70と、パルス検出部55と、モータ制御部52と、を備える。位置センサ56は、モータ51のロータ磁極位置を検出する。電流センサ70は、モータ51の電流を検出する。パルス検出部55は、モータ51の回転に応じたパルスを検出する。モータ制御部52は、モータ51の回転を制御する。また、モータ制御部52は、第1制御部71と、第2制御部72と、を備える。第1制御部71は、位置センサ56の検出結果及びパルス検出部55の検出結果に基づいてモータ51の回転を制御する。第2制御部72は、電流センサ70の検出結果に基づいてモータ51の回転を制御する。
(もっと読む)
繊維機械
【課題】糸処理ユニットの運転状態を容易に把握することができる繊維機械を提供する。
【解決手段】精紡機が備える複数の紡績ユニットのそれぞれは、当該紡績ユニットの運転状態が、複数の運転レベルの中でどの運転レベルに対応するかを表示するレベル表示部86を備えている。また、前記運転レベルは、基準となる基準運転状態が中央となるように区分されている。前記基準運転状態は、精紡機が複数備えた紡績ユニットの運転状態の平均値か、或いは所定の設定値とすることができる。
(もっと読む)
撚線形態の繊維材料を引き伸ばす練篠機構を有する紡績用前処理機のためのまたは該前処理機における装置
【課題】空間が限られる場合に簡素な手段により間隔センサの配置を可能とし、且つ、検知対象表面に対する間隔センサの優れた結合または協働を可能にする。
【解決手段】装置は、一方のローラは移動不能に配置され且つ他方のローラは該一方のローラから離間移動可能に配置されると共に相互に当接して押圧されるべく配置された一対の測定ローラと、各ローラの内の一方のローラのための保持要素に対して結合された対応表面(検知対象表面)からの間隔を測定する非接触式間隔センサとを有しており、間隔センサ(9、25;47;57、571、572;60)は、ローラ(7、8;15、16;42、43)のための保持要素(52、52b、53a、53b)に対して一体化される。
(もっと読む)
撚線形態の繊維材料を引き伸ばす練篠機構を有する紡績用前処理機のためのまたは該前処理機における装置
【課題】空間が限られる場合に簡素な手段により間隔センサの配置を可能とし、且つ、検知対象表面に対する間隔センサの優れた結合または協働を可能にする。
【解決手段】装置は、一方のローラは移動不能に配置され且つ他方のローラは該一方のローラから離間移動可能に配置されると共に相互に当接して押圧されるべく配置された一対の測定ローラと、各ローラの内の一方のローラのための保持要素に対して結合された対応表面(検知対象表面)からの間隔を測定する非接触式間隔センサとを有しており、間隔センサ(9、25;47;57、571、572;60)は、他方のローラ(7、8;15、16;42、43)のための保持要素(52、52b、53a、53b)に結合され、且つ、間隔センサ(9、25;47;57、571、572;60)および対応表面(53';59)は、各保持要素(52、52b、53a、53b)の側面であって相互に臨むという側面上に夫々配置される。
(もっと読む)
下流側における調整機構を有する紡績準備機械
【課題】繊維スライバーの質量の高周波の変化に対する補償を改善すること。
【解決手段】一対の上流ローラ(5)と一対の下流ローラ(7)とを有するドラフトシステム(4)と、センサ手段(2、3、20)と、処理ユニット(22)と、カレンダローラ(14)と、回転台(17)を有する収納手段(16、17)とを備える紡績準備機械、特に、繊維材料(FB)をドラフトおよび/または二重にするドラフトシステム(4)を有する練条機または梳綿機または梳毛機において、一対の下流ローラ(7)と一対のカレンダローラ(14)が処理ユニット(22)による制御により回転速度に少なくとも一次的な速度変化を伴って駆動されるとともに、収納手段(16、17)が一対の下流ローラ(7)と一対のカレンダローラ(14)の速度変化と比較してより小さな速度変化を伴って駆動され、または、基本的に一定の回転速度で駆動される紡績準備機械。
(もっと読む)
個別スピンドル駆動装置を有する紡績機または撚糸機
【課題】紡績機または撚糸機において制御電子装置およびエネルギ供給部を構成するための新規の構造コンセプトを提供する。
【解決手段】1つのセクションの複数のスピンドル駆動電子ユニットおよびセクション電子ユニットが共通の導体路板上に配置されており、スピンドル駆動電子ユニットが導体路の形の第2のデータ線を介してセクション電子ユニットと接続されており、セクション電子ユニットは第1の接続インタフェースおよび第1のデータ線を介して機械制御ユニットと接続されており、スピンドル駆動電子ユニットは第2の接続インタフェースおよび第1の給電線を介してスピンドル駆動装置と接続されている。
(もっと読む)
独立したスピンドル駆動装置を備えた精紡機
【課題】巻管受容部3及びスピンドルシャフト4を備えた回転駆動可能なスピンドル上部2と、上部軸受22及び下部軸受23を備えたスピンドルシャフト4と、エアギャップ61によって互いに分離されたステータ及びロータを有する駆動する電動モータと、電動モータを収容するモータハウジング31とを有する、繊維機械のスピンドルユニット1を改良して、構造が簡単で経済的に製造可能なものを提供する。
【解決手段】ステータ32がモータハウジング13に、ロータ6が、スピンドル上部2の結合部材5に、それぞれ相対回動不能に結合され、スピンドル軸受ハウジング21の下部区分が、これに軸受されたスピンドルシャフト4と共にフットハウジング41内に嵌め込まれており、モータハウジング31が巻管受容部3とフットハウジング41との間に配置されていて、フットハウジング41と相対回動不能に結合されている。
(もっと読む)
引伸ばし作業区間または引伸ばしユニットを運転するための方法および装置
本発明は、ポリマー糸製ケーブルを、複数の駆動引伸ばしローラーを用いて引き伸ばすための引伸ばし作業区間または引伸ばしユニットの運転方法に関する。発明に従い、各引伸ばしローラー(2.1、2.2)が所定の動作値に個々に制御されることが意図される。これに加え、各引伸ばしローラー(2.1、2.2)には、別々に駆動可能な駆動装置が付設されている。 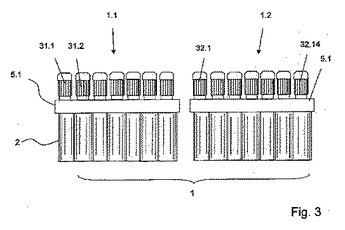 (もっと読む)
(もっと読む)
電動機
本発明は電動機(1)、殊に繊維機械用の電動機に関する。当該電動機は、供給電圧の欠落時に発電機として作動し、電動機(1)の回転子として構成されたロータ並びに多相電動機(1)を位相制御するモータ回路(3)を含み、当該モータ回路は複数の半導体構成素子(4、5、6、7、8、9、10、11)を含み、前記電動機(1)は、発電モードの間の所定境界値の通過時に短絡可能である。前記境界値通過時の短絡は、モータ回路(3)が含んでいる前記半導体構成素子(4、5、6、7、8、9、10、11)のうちの1つまたは複数の半導体構成素子を、動作状態をあらわす信号によって駆動制御することによって行われる。 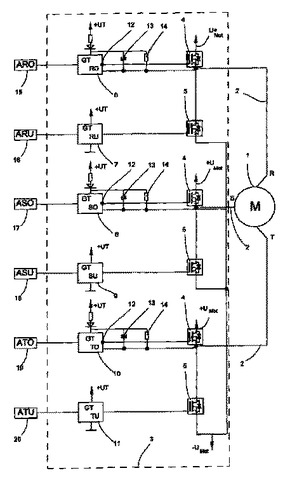 (もっと読む)
(もっと読む)
周波数変換器を備えた紡績機
この発明は、紡績機内の電子部品9,10を出発点とする。それは、冷却が必要な程多くの熱を発生する周波数変換器などの電子部品である。従って、そのような電子部品は、紡績領域からの浮遊物、埃、その他の汚染物を吸引した排気フロー2内に突き出た冷却フィン16を備えている。この排気フロー2は、フィルター5で汚染物を除去され、それにより次第に絞り込まれて行く。その量とそのために冷却効果が低下する。それに対して、電子部品9,10の過熱を防止するために、温度が許容できない程高くなった場合に制御機器12に信号を送る温度計17を配備して、制御機器が、フィルターを清掃する必要性が有ることを警告するようにする。この提示は、段階的に行うことができ、最後の段階では、電子部品への電力供給を停止するか、或いは駆動を停止させる。 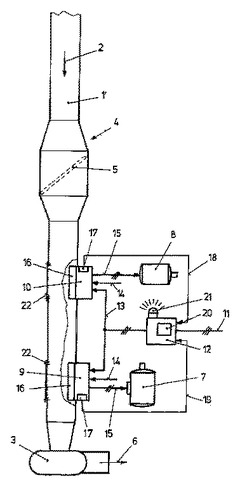 (もっと読む)
(もっと読む)
1 - 14 / 14
[ Back to top ]