
Fターム[4L056EB16]の内容
Fターム[4L056EB16]に分類される特許
1 - 20 / 21
糸巻取機及び糸巻取ユニット
【課題】巻き取り開始直後の糸速度を正確に取得可能な糸巻取機を提供する。
【解決手段】精紡機は、巻取装置13と、紡績装置9と、ロータリエンコーダ機構と、糸継装置43と、継目モニタ47と、台車制御部と、を備えている。巻取装置13は、パッケージ45に紡績糸10を巻き取る。紡績装置9は、巻取装置13に紡績糸10を供給する。ロータリエンコーダ機構は、パッケージ45の回転速度を検出するためのものである。糸継装置43は、紡績装置9とパッケージ45との間の紡績糸10を糸継ぎして継ぎ目99を形成する。継目モニタ47は、紡績糸10の走行方向で糸継装置43の下流側に配置され、継ぎ目をモニタする。台車制御部は、ロータリエンコーダ機構の検出結果に基づいて取得した紡績糸10の走行速度と、継目モニタ47によるモニタ結果と、に基づいて、糸継装置43が形成した継ぎ目が正常であるか否かを判断する。
(もっと読む)
紡績機

【課題】パッケージの作成を中断してから該パッケージの作成を再開させるまでの一連の工程において、紡績糸が弛まない紡績機を提供する。
【解決手段】紡績糸Yを巻き取ってパッケージPを作成する紡績ユニット10を複数備えた紡績機100において、パッケージPと接触して該パッケージPを巻取方向に回転させる駆動ローラ61と、駆動ローラ61に対してパッケージPを接触位置と離間位置に移動させるクレードル62と、パッケージPと接触して該パッケージPを巻取方向とは逆方向である解舒方向に回転させる逆転ローラ22と、パッケージPに対して逆転ローラ22を接触位置と離間位置に移動させる駆動部23と、クレードル62によってパッケージPを移動させて該パッケージPが駆動ローラ61に対して接触位置となる直前で、逆転ローラ22をパッケージPに対して離間位置に移動させるように駆動部23を制御する制御部40と、を備える、とした。
(もっと読む)
紡績ユニット及び紡績機
【課題】吸込口部による紡績糸の糸端の予期せぬ吸い込みを防止する。
【解決手段】紡績ユニット2は、紡績糸10を供給する空気紡績装置9と、紡績糸10をパッケージ45に巻取る巻取装置28と、糸継ぎを行うスプライサ43と、パッケージ45から紡績糸10の糸端をサクションマウス104によって捕捉して、捕捉した紡績糸10の糸端をスプライサ43の糸継位置へ案内するサクションマウスモジュール46と、サクションマウス104を移動可能とするカム駆動機構53と、を備える。カム駆動機構53は、少なくとも、サクションマウス104の位置を、パッケージ45から紡績糸10の糸端を捕捉する捕捉位置、捕捉した糸端をスプライサ43の糸継位置へ案内する案内位置、及び、案内位置よりも捕捉位置から離れた位置であり、且つ、案内位置よりも、空気紡績装置9と巻取装置28との間の糸道から離れた退避位置、に移動させる。
(もっと読む)
糸巻取機及び糸巻取ユニット
【課題】糸継終了時に発生する糸のたるみを解消した糸巻取機を提供する。
【解決手段】糸継装置43は、紡績装置とパッケージとの間の紡績糸10を糸継ぎする。糸道規制部材(糸寄せレバー96及び糸押さえレバー98)は、紡績糸10に接触することで当該紡績糸10を屈曲させる位置と、前記紡績糸10を開放した位置と、の間で移動可能である。台車制御部は、糸道規制部材を、糸継ぎの際に紡績糸10に接触させて当該紡績糸10を屈曲させるとともに、当該糸継ぎの終了後、少なくとも巻取装置における紡績糸10の巻き取りが開始するまでの間は、紡績糸10を屈曲させた状態を維持するように制御する。
(もっと読む)
糸継装置及び糸巻取機
【課題】回収した糸屑を確実に吸引排出することができる集塵器を備えた糸継装置を提供する。
【解決手段】糸継装置14は、糸端に空気流を作用させて当該糸端を解撚する解撚パイプ82と、前記解撚によって生じた糸屑を回収するための専用の集塵器80と、を備えている。集塵器80は、回収した糸屑を一時的に収容する集塵室42を備える。集塵室42には、解撚パイプ82側に開口する糸屑導入口と、当該集塵室42内の糸屑を外部へと吸引排出させるための糸屑排出開口部47と、糸屑排出開口部47に対向する位置に設けられたエア抜きフィルタ45と、が形成されている。
(もっと読む)
糸巻取機
【課題】 糸切断後に糸貯留ローラに残存する糸部分が、糸継後に巻取を再開したときにパッケージに巻取られてしまうことを防止可能な、糸巻取機を提供すること。
【解決手段】 精紡機1は、巻取装置12と、ヤーンクリアラ11と、カッター10と、弛み取り装置8と、糸継装置92と、機台制御部96を備えている。弛み取り装置8は、弛み取りローラ30と、弛み取りローラ30の表面の糸を検出する糸検出センサを有する。機台制御部96は、ヤーンクリアラ11により糸欠陥が検出されてカッター10により糸が切断されたときに、糸検出センサ34の検出結果に基づいて、糸継装置92に糸継を行わせるか否かを判断する。
(もっと読む)
紡績機
【課題】糸継時において、パッケージに糸品質の不安定な部分が混入してしまうことを防止できるとともに、糸端を捕捉するときに糸切れを良好に抑制できる紡績機を提供する。
【解決手段】精紡機は、糸貯留ローラ21と、糸掛け部材と、糸外しレバー28と、サクションパイプ44と、ユニットコントローラと、を備える。糸掛け部材は、紡績糸10を糸貯留ローラ21に巻付可能である。糸外しレバー28は、糸掛け部材から紡績糸10を外すことが可能である。サクションパイプ44は、紡績糸10の糸端を捕捉可能であり、捕捉した紡績糸10に撚りを掛けることが可能な撚掛けノズルを備える。ユニットコントローラは、サクションパイプ44が捕捉した紡績糸10が糸貯留ローラ21に巻かれている間は撚掛けノズルを作動させるとともに、糸外しレバー28が糸掛け部材から紡績糸10を外すまでに撚掛けノズルを停止させる。
(もっと読む)
自動ワインダ
【課題】上記の負圧源に接続され、異物や糸などを吸引する部材を複数有する自動ワインダの構成を簡素とする技術を提供する。
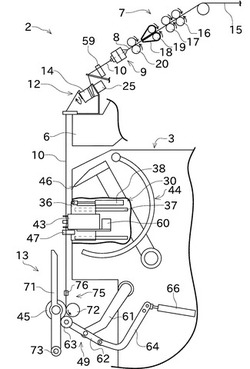
【解決手段】給糸ボビン3から解舒された糸4を綾振りながら巻取ボビン6,7に巻き取ってパッケージ7を形成するための糸巻取ユニット2と、負圧を発生させるための負圧源62と、を備える。前記糸巻取ユニット2は、糸4及び異物のうち少なくとも何れか一方を吸引するための吸引手段(25,27,20)を複数有する。前記複数の吸引手段(25,27,20)の各基端(25b、27b、20c)と、負圧源62とは、吸引制御ユニット30を介して接合される。
(もっと読む)
糸巻取機
【課題】エネルギー効率に優れ、糸継装置による糸継作業が円滑であるとともに、綾振糸ガイドの破損を防止可能な糸巻取機を提供する。
【解決手段】自動ワインダのワインダユニット10は、給糸部24と、パッケージ駆動モータ41と、トラバースガイド11と、トラバースガイド駆動モータ45と、トラバース制御部46と、を備える。パッケージ駆動モータ41は巻取ボビン22を回転させ、給糸ボビン21からの糸20を巻き取る。トラバースガイド11は、給糸部24と巻取ボビン22との間に設けられ、巻取ボビン22への糸20の巻取の際に当該糸20を綾振りする。トラバースガイド駆動モータ45は、前記トラバースガイド11を電磁力によって往復駆動する。トラバース制御部46は、例えば異常の発生により糸20の巻取が停止したときは、トラバースガイド駆動モータ45の励磁を巻取が再開されるまでオフするように、励磁制御部63によって制御する。
(もっと読む)
糸弛み取り装置及びそれを備える紡績機
【課題】糸に掛かる張力を紡績機の稼動時において制御可能な糸弛み取り装置を提供する。
【解決手段】糸弛み取り装置12は、電動モータ25と、弛み取りローラ21と、糸掛け部材22と、電磁石36と、制御部と、を備える。弛み取りローラ21は、電動モータ25によって回転駆動される。糸掛け部材22は、弛み取りローラ21に対して同心で相対回転自在に取り付けられる。電磁石36は、糸掛け部材22に作用させる磁界を生成する。前記制御部は、前記糸掛け部材22の前記弛み取りローラ21に対する相対回転に抗する抵抗トルクを前記磁界によって発生させるとともに、前記電磁石36への入力制御によって前記抵抗トルクを制御する。
(もっと読む)
ブロワモータの制御方法とブロワシステム
【課題】センサなどの付加的な装置を用いることなくブロワを駆動するモータの回転数を制御でき、また、必要とする最低限の負圧を供給しながら、ブロワを駆動するモータの回転数を抑制でき、自動ワインダーを円滑に稼動させながら省エネルギー化を図る。
【解決手段】各ワインディングユニット1の糸継ぎ動作回数と、糸継ぎに失敗した失敗回数とを集計してシステム全体のミス率を算出する。算出したミス率に基づいて前記ブロワモータ18に電力を供給するインバータ19の出力周波数を増減制御する。
(もっと読む)
繊維機械
【課題】高い生産性を備える繊維機械を提供する。
【解決手段】自動ワインダ1は、給糸ボビン5から解舒され巻取管7に巻き取られる紡績糸Yに対して糸継を行う糸継装置20と、糸継装置20よりも上流側の紡績糸Yとしての下糸Y2を吸引して該下糸Y2を糸継装置20に案内する下糸案内装置64と、を有し、紡績糸Yを巻取管7に巻き取ってパッケージ6を形成する巻取ユニット2を複数で備える。複数の巻取ユニット2に、下糸案内装置64が下糸Y2を吸引したことを検知する下糸検知センサ66を設ける。自動ワインダ1は、下糸案内装置64が下糸Y2を糸継装置20に案内するに際し、下糸案内装置64が下糸Y2を吸引したことを下糸検知センサ66が検知したら、下糸Y2を糸継装置20に案内するように下糸案内装置64を制御する下糸案内動作制御部91を備える。
(もっと読む)
精紡機を制御するための方法
【課題】紡出終了過程の間でも高い運転確実性および生産性によりすぐれているような、高い自動化度を有する方法を提供する。
【解決手段】機械制御部21またはオペレータによって入力ユニットを介して多数のコップ交換プロセスプログラムから、紡糸された原料および/または紡出された糸タイプもしくは糸種類および/または紡出された糸番手および/または糸撚りおよび/または機械構成に関連して、妥当なコップ交換プロセスプログラム26が選び出され、該コップ交換プロセスプログラムが、紡出プログラム23により形成された糸に比べてコップ交換プロセス時の糸特性の意図的な変化を実施し、これにより、紡出終了プロセス、ボビン交換過程および/または後続の紡出開始プロセスのために最適に適合された糸特性を達成する。
(もっと読む)
電磁式テンサーを組み込んだ糸弛み取り装置
【課題】糸掛け部材の弛み取りローラに対する安定した回転抵抗を実現し、品質の安定したパッケージを形成できるようにした電磁式テンサーを組み込んでなる糸弛み取り装置を提供すること。
【解決手段】回転駆動源25と、回転駆動源によって回転駆動される弛み取りローラ21と、弛み取りローラに対して同心で相対回転自在に取り付けられる糸掛け部材22とを備え、糸掛け部材に磁界が作用するように、電磁石による磁界形成手段を弛み取りローラに設け、磁界形成手段により生じる磁界によって、弛み取りローラと糸掛け部材との間に回転トルクを発生させ、電磁石への入力制御によって回転トルクを制御するようにしたことを特徴とする電磁式テンサーを組み込んだ糸弛み取り装置。
(もっと読む)
糸継ぎ装置および糸継ぎ方法
【課題】 巻取パッケージ側の糸端と給糸側の糸端とを糸継ぎする際に、巻取パッケージの表面を傷めずに巻取パッケージに巻かれた糸欠点部分を確実に捕捉し全て除去可能とする糸継ぎ装置および糸継ぎ方法を提供することである。
【解決手段】 糸継ぎ部材と、巻取パッケージの表面に接近して糸端を吸引して糸継ぎ部材まで案内する糸端捕捉手段1と、巻取パッケージを糸解舒方向に回転させる逆転手段2とを備えて、前記糸端捕捉手段1を、巻取パッケージの表面に接近して糸端を吸引する捕捉位置1Bと、糸の不良部分を連続吸引する吸引位置1Cと、吸引した糸端を糸継ぎ部材まで案内する待機位置1Aとに移動自在とする糸継ぎ装置Pとし、前記吸引位置1Cを巻取パッケージPW1から離れた位置とする糸継ぎ方法とした。
(もっと読む)
繊維機械
【課題】繋ぎ目の状態などを簡単にチェックできるように糸継ぎ動作を制御するチェックモードを有する。
【解決手段】給糸側からの糸Yを巻き取る巻取り手段5と、糸欠点を検出する手段32と、この糸欠点検出手段32で糸欠点を検出したときに、糸欠点を切断、除去して給糸側及び巻取側の各糸端Y1,Y2を繋ぐ糸継ぎ手段7とを備え、巻取り手段5及び糸継ぎ手段7の動作を司る制御手段15を備え、この制御手段15は、糸継ぎ手段7による各糸端Y1,Y2の糸継ぎ動作の途中又は終了後に、糸継ぎ手段7及び巻取り手段5の動作を中止するよう制御するチェックモードを有している。
(もっと読む)
クロスコイルを作製する繊維機械
本発明によれば、クロスコイルを作製する繊維機械の作業個所(20)の作業計算器(22)は、それぞれ作業個所フィールドバス(23)によってそれぞれの作業個所(20)の別個の機能群(26a〜26e)と接続されていることが提案される。このことによって高いフレキシビリティが達成され、作業個所(20)に僅かなコストで後から適合することができる。  (もっと読む)
(もっと読む)
繊維機械
【課題】 糸欠点の発生した状況に応じて、糸継台車による糸欠点の除去及び糸継作業が糸の無駄なく効率よく行えるようにする。
【解決手段】 複数の糸処理ユニット2と、その並べられる方向に走行可能な糸継台車3を備える。糸処理ユニット2は、糸欠点を検出し且つその種類を判別可能なヤーンクリアラ52を備える。糸継台車3は、各糸処理ユニット2についての糸欠点の有無及び糸欠点の種類、巻取パッケージ45の径の情報を取得可能に構成している。糸継台車3は糸欠点の発生した糸処理ユニット2に対し口出しを行うが、この際、サクションマウス46が巻取パッケージ45に接近して吸引を開始してから糸継装置43に糸を案内するまでの時間や、巻取パッケージ45を糸解舒方向に回転させる逆転ローラ55の速度を、検出された糸欠点の種類や糸欠点発生時の巻取パッケージ45の径に応じて異ならせる。その後、糸継装置43で糸欠点の除去及び糸継ぎを行う。
(もっと読む)
繊維機械
【課題】 口出し成功率が良好で糸継時間を短縮できる繊維機械を提供する。
【解決手段】 糸10の巻取部12を備えた糸処理部2と、この糸処理部2に対して糸継ぎする糸継部(糸継台車)3と、を備える。前記糸継部3は、糸継作業を行う糸継装置43と、巻取部12の巻取パッケージ45の表面に接近して糸端を吸引してその糸10を前記糸継装置43に案内するサクションマウス46と、巻取パッケージ45を糸解舒方向に回転させる逆転ローラ55と、を備えている。サクションマウス46から吸引される糸の糸通路50には吸引検出センサ54が備えられる。口出し時において逆転ローラ55は当初は比較的低速で回転されるが、前記吸引検出センサ54が糸10を検出すると、増速制御される。
(もっと読む)
繊維機械ならびに継ぎ目を最適化する方法
本発明は、繊維機械、特にオープンエンド紡績機械であって、単数または複数の走行可能なメンテナンス装置が設けられており、該メンテナンス装置が、糸を新たに紡績開始するか、または糸切れ後に紡績開始するための手段を有しており、さらに、繊維機械を制御するための制御装置を装備している形式のものに関する。本発明により繊維機械は、繊維機械により搬送され連続的に通走する糸の糸張力および/または糸切れ張力を測定するための測定装置が設けられており、該測定装置が全体的にまたは部分的に繊維機械、メンテナンス装置またはその両者に配置されていることにより特徴付けられている。 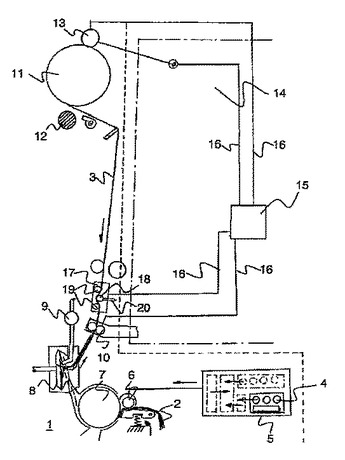 (もっと読む)
(もっと読む)
1 - 20 / 21
[ Back to top ]