
Fターム[4L056EC05]の内容
紡績及び撚糸 (4,539) | 検出、制御の対象、内容、時期 (328) | 糸、巻体に関するもの (101) | むら (30)
Fターム[4L056EC05]に分類される特許
1 - 20 / 30
紡績機、巻取装置、及び繊維機械
【課題】回転体の周期的な異常を検出することができ、検出精度の向上を図ることが可能な紡績機、巻取装置、及び繊維機械を提供すること。
【解決手段】ドラフトする又は巻き取るための回転体を駆動するモータのトルク及び回転速度の少なくとも一方を監視し、この監視結果に基づいて、回転体の周期的な異常の有無を判定する構成とする。例えば、回転体の回転に伴って移動する繊維束に、周期的に太さが異なるなどの異常がある場合には、モータに作用する負荷トルクが変動したり、モータの回転速度が変動したりする。そのため、モータのトルク及び回転速度の少なくとも一方を監視することで、回転体の周期的な異常の有無を判定し、回転体によってドラフト又は巻き取られる繊維束の周期的な異常を検出することができる。
(もっと読む)
紡績機

【課題】紡績機において、紡績糸のテンションを精度良く検出できる構成を提供する。
【解決手段】スピニングセンサ52は、紡績装置と巻取装置との間で、走行する紡績糸10のテンションを検出する。またスピニングセンサ52は、走行する紡績糸10を接触させる糸ガイド60と、糸ガイド60に加わった力に応じた信号を出力する歪みセンサと、を備える。糸ガイド60は、少なくとも紡績糸10に接触する部分において、軸線64に直交する断面における断面輪廓形状が略円弧状に形成されている。糸ガイド60の上流側の紡績糸10aの糸道に平行な方向をY軸方向、ドラフトローラの軸方向に平行な方向をX軸方向、Y軸方向及びX軸方向に直交する方向をZ軸方向とする。Z軸方向で見たときに、糸ガイド60の軸線64は、Y軸方向に対して斜めに配置されている。
(もっと読む)
糸巻取装置用の回路基板及び糸巻取装置
【課題】巻取部の異常振動を正確に検出する。
【解決手段】糸巻取ユニット1用の回路基板105は、回路基板本体105aと、回路基板本体105aに設けられた振動検出チップ109とを備えている。
(もっと読む)
糸走行情報取得装置及び糸巻取機
【課題】正確な糸走行情報を取得することができる糸走行情報取得装置を提供する。
【解決手段】第1糸ムラセンサ43は、走行する糸の太さムラを検出して第1糸太さムラ信号を出力する。第2糸ムラセンサ44は、前記第1糸ムラセンサ43から所定の間隔を隔てて配置され、前記糸の太さムラを検出して第2糸太さムラ信号を出力する。類似度評価部65は、下流側フレームと上流側フレームを比較して、前記第1糸太さムラ信号と前記第2糸太さムラ信号との類似度を求める類似度評価処理を、上流側フレームの先頭位置を変化させて複数回行うことで複数の前記類似度を求める。重み付け処理部66は、前記複数の類似度に対して重み付けを行い、複数の重み付き類似度を求める。走行情報取得部67は、前記重み付き類似度に基づいて、前記第1糸太さムラ信号と前記第2糸太さムラ信号との時間的なズレ量を算出するとともに、前記ズレ量に基づいて糸走行情報を取得する。
(もっと読む)
調節開始点に対する調整値を直接求めるための装置
【課題】ドラフト装置の調節機構における最適な調節開始点の算出及び調整を改善することを目的とする。
【解決手段】練条機の制御装置が、スライバのドラフトを変化させるために予備制御装置を有しており、ドラフトされたスライバに基づいて、CV値などの品質をあらわす値の複数の測定値を記録でき、しかもこれらの測定値を、練条機を制御するための最適な調節開始点を形成するような最小値を有する関数を求めるために利用できる。最適な調節開始点の算出および調整を改善するために、ドラフトされたスライバに基づきCV値などの品質をあらわす複数の測定値を記録でき、スライバにおける品質をあらわす値の調節開始点を基準にして互いに対応する測定値を1つの品質特性係数にまとめることができ、さらに複数の品質特性係数に基づいて最小値が最適な調節開始点を形成するような関数を求める。
(もっと読む)
繊維製造過程を最適化する方法
方法は、繊維最終製品を製造する繊維製造過程(101)を最適化するために用いられる。製造過程(101)が、要素として少なくとも1つのパラメータ(x1,・・・,xn)を持つパラメータ集合({x1,・・・,xn})を含む数学モデル(102)において製造過程(101)が表現される。パラメータ集合({x1,・・・,xn})のうち、少なくとも1つの変化パラメータ(xi)が、モデル(102)においてそれぞれ1つの変化(Δxi)だけ変化される(106)。少なくとも1つの変化(Δxi)が最終製品の財政的価値(P)に及ぼす影響が評価される(108)。評価(108)の出力に関係して、少なくとも1つの変化(Δxi)が製造過程(101)へ受け継がれる(109)。 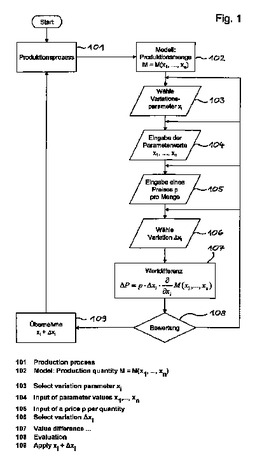 (もっと読む)
(もっと読む)
紡績機及び糸貯留ローラに残留した紡績糸の除去方法
【課題】糸強力の弱い糸欠点の発生により糸貯留ローラに残留した紡績糸の除去を効率的に行うことのできる紡績機を提供する。
【解決手段】精紡機は、紡績装置と、ヤーンクリアラと、糸貯留ローラと、吸引口と、吸引装置と、ユニットコントローラと、を備える。紡績装置は、繊維束に撚りを掛けて紡績糸を生成する。ヤーンクリアラは、紡績装置の下流側に配置され、走行する紡績糸の糸欠点を検出する。糸貯留ローラは、ヤーンクリアラの下流側に配置され、紡績糸を外周面に巻き付けて回転することで、紡績糸を一時的に貯留する。基端側近傍に配置される。吸引装置は、吸引口に吸引流を発生させることが可能である。ユニットコントローラは、ヤーンクリアラが糸強力の弱い所定の糸欠点を検出すると、その他の糸欠点を検出したときに比べて、紡績糸の供給を停止する停止タイミングを遅らせるとともに、この停止タイミングの後に糸貯留ローラを停止させる。
(もっと読む)
繊維機械管理システム及び精紡ワインダ
【課題】精紡ワインダにおいて効率の良いメンテナンスを支援する繊維機械管理システムを提供する。
【解決手段】ボビン23を乗せて搬送するトレーは、ボビンを形成した精紡ユニット32を特定可能な情報を記憶するRFタグを備える。ワインダ3は、各巻取ユニット31が実ボビンから解舒している紡績糸の状態を監視して糸品質情報を取得する糸品質監視部21を備える。糸品質情報に基づいて前記糸に所定の特徴を検出した場合、管理システムは、前記ボビン情報に基づいて、粗紡ユニット33又は精紡ユニット32の中から、前記特徴に対応する対応ユニットを特定する。また、管理システムは、前記糸品質情報に基づいて、前記対応ユニットにおいて前記特徴に対応する部位である対応部位を特定するとともに、当該対応部位の状態を推定する。そして、前記対応ユニットと、前記対応部位と、前記対応部位の状態と、がディスプレイ18によって通知される。
(もっと読む)
紡績用の間隙を備える機械、特に、カーディング機械、ドローフレーム、コーミング機械、あるいは、フライヤ用の測定信号を補正するための装置
【課題】同心度誤差を簡便に短時間で検知して補正できる、装置を提供する。
【解決手段】紡績用の間隙を備える機械、特に、カーディング機械、ドローフレーム、コーミング機械、あるいは、フライヤ用の装置で、少なくとも1つの布地繊維スライバーの厚さに関する測定信号を補正する。信号は検知ロールのペアから得られ、2つの検知ロールの1つは固定され、もう一方は力がかけられて固定された検知ロールから離れるように動くことができ、検知ロールのペアの非真円度又は偏心起因の周期的誤差を検知できる。検知ロールのペアは変位センサに接続され、回転角トランスミッターは電気的システムの入力に信号を送る。電気的システムの出力は補正された測定信号を送る。同心度誤差を検知でき簡便に短時間で補正できるように、可動検知ロールにかけられる圧力により、固定検知ロールと可動検地ロールの円周面が接触し、接触時、これらの検知ロールは回転できる。
(もっと読む)
撚線形態の繊維材料を引き伸ばす練篠機構を有する紡績用前処理機のためのまたは該前処理機における装置
【課題】空間が限られる場合に簡素な手段により間隔センサの配置を可能とし、且つ、検知対象表面に対する間隔センサの優れた結合または協働を可能にする。
【解決手段】装置は、一方のローラは移動不能に配置され且つ他方のローラは該一方のローラから離間移動可能に配置されると共に相互に当接して押圧されるべく配置された一対の測定ローラと、各ローラの内の一方のローラのための保持要素に対して結合された対応表面(検知対象表面)からの間隔を測定する非接触式間隔センサとを有しており、間隔センサ(9、25;47;57、571、572;60)は、他方のローラ(7、8;15、16;42、43)のための保持要素(52、52b、53a、53b)に結合され、且つ、間隔センサ(9、25;47;57、571、572;60)および対応表面(53';59)は、各保持要素(52、52b、53a、53b)の側面であって相互に臨むという側面上に夫々配置される。
(もっと読む)
撚線形態の繊維材料を引き伸ばす練篠機構を有する紡績用前処理機のためのまたは該前処理機における装置
【課題】空間が限られる場合に簡素な手段により間隔センサの配置を可能とし、且つ、検知対象表面に対する間隔センサの優れた結合または協働を可能にする。
【解決手段】装置は、一方のローラは移動不能に配置され且つ他方のローラは該一方のローラから離間移動可能に配置されると共に相互に当接して押圧されるべく配置された一対の測定ローラと、各ローラの内の一方のローラのための保持要素に対して結合された対応表面(検知対象表面)からの間隔を測定する非接触式間隔センサとを有しており、間隔センサ(9、25;47;57、571、572;60)は、ローラ(7、8;15、16;42、43)のための保持要素(52、52b、53a、53b)に対して一体化される。
(もっと読む)
糸巻取装置及びそれを備える自動ワインダ
【課題】糸欠陥検出器を通過する糸送り量を正確に算出して糸欠陥の検出精度を向上させることができる糸巻取装置を提供する。
【解決手段】巻取ユニット10は、パッケージ30に巻き取られる前の糸20を貯留するための糸プール部71と、糸プール部71に糸20を供給するために駆動されるサーボモータ55と、を備える。また、巻取ユニット10は、糸欠陥を検出するために糸プール部71の上流側に配置されるクリアラ15を備える。そして、巻取ユニット10は、糸プール部71より上流側の糸送り量に基づいて、クリアラ15を通過した太さムラの長さを計算する。
(もっと読む)
下流側における調整機構を有する紡績準備機械
【課題】繊維スライバーの質量の高周波の変化に対する補償を改善すること。
【解決手段】一対の上流ローラ(5)と一対の下流ローラ(7)とを有するドラフトシステム(4)と、センサ手段(2、3、20)と、処理ユニット(22)と、カレンダローラ(14)と、回転台(17)を有する収納手段(16、17)とを備える紡績準備機械、特に、繊維材料(FB)をドラフトおよび/または二重にするドラフトシステム(4)を有する練条機または梳綿機または梳毛機において、一対の下流ローラ(7)と一対のカレンダローラ(14)が処理ユニット(22)による制御により回転速度に少なくとも一次的な速度変化を伴って駆動されるとともに、収納手段(16、17)が一対の下流ローラ(7)と一対のカレンダローラ(14)の速度変化と比較してより小さな速度変化を伴って駆動され、または、基本的に一定の回転速度で駆動される紡績準備機械。
(もっと読む)
糸品質測定器及び糸巻取機
【課題】正確な糸欠点長さ評価及び周期ムラの検出が可能な糸品質測定器及び糸巻取機を提供する。
【解決手段】自動ワインダを構成するワインダユニット10は、クリアラ(糸品質測定器)15を備えている。このクリアラ15は、速度を変化させながら走行する紡績糸20の太さムラを検出し、糸の太さムラの検出を行っている。このとき、糸速度に応じてサンプリング周波数を変化させて検出信号のサンプリングを行っている。クリアラ15は、走行する糸の太さを検出する第1の糸ムラセンサ43と、CPU47と、を備える。CPU47は、外部の回転センサ42から得られる糸速度信号を受信し、当該糸速度信号に応じたサンプリング周波数で第1の糸ムラセンサ43の信号のサンプリングを行う。
(もっと読む)
粗紡機における異常検出装置
【課題】紡出中の粗糸の張力状態が適正張力からずれている場合に、適正張力に調整して紡出を継続する粗紡機において、本来紡出すべき粗糸重量とは違う品質不良の粗糸巻が後工程に供給されるのを抑制する。
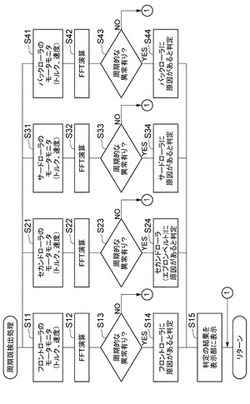
【解決手段】異常検出装置は、フロントローラの回転速度を検出可能なフロントローラ回転速度検出手段と、巻き取り回転速度を検出する巻き取り回転速度検出手段とを備えている。また、フロントローラ回転速度検出手段及び巻き取り回転速度検出手段の検出信号に基づいて各層の巻き取り時における実粗糸巻径を算出可能な実粗糸巻径算出手段と、実粗糸巻径算出手段により算出された実粗糸巻径に基づいて粗糸重量異常を検知する粗糸重量異常検知手段とを備えている。
(もっと読む)
紡績機械
【課題】機台を複数のブロックに分けて各ブロック毎に繊維束集束装置を構成する吸引装置が設けられるとともに、各吸引装置にそれぞれ設けられたモータを共通のインバータで駆動する構成において、異常発生時に正常ブロックにおける糸切れ発生を防止する。
【解決手段】繊維束集束装置はブロック毎にモータ47を備えた吸引装置で負圧にされるダクトを備え、吸引部が接続管を介してダクトに接続されている。各モータ47はモータ毎にコンタクタ54を介して共通のインバータ53と電気的に接続されるとともに、インバータ53を介して制御装置57により制御される。各ブロックにはモータ47の過負荷に繋がる異常を検出するための圧力センサ56と、圧力センサ56の検出信号に基づいて異常の有無を判断し、異常時に対応するブロックのコンタクタ54を非接触状態に切り換えるコンタクタ制御手段55が設けられている。
(もっと読む)
ヤーンクリアラの検出ヘッドの汚れ検出方法及び検出システム
【課題】素早く正確に光電式ヤーンクリアラのヘッド汚れを検出可能な方法等を提供する。
【解決手段】複数錘からなる機台システムに装備され、各錘における糸品質その他を監視する複数のヤーンクリアラの検出ヘッドの汚れ検出方法であって、特定錘のヤーンクリアラから出力される糸むら信号に基づいて得られる糸太さデータ(φ)、及び/又は糸均斉度データ(CV%)の変化が、監視される糸自身の特性の変化に起因するのか、上記検出ヘッドの汚れに起因するのかを、他の錘のヤーンクリアラから出力される糸むら信号に基づいて得られる糸太さデータ(φ)、及び/又は糸均斉度データ(CV%)との関係から判断するようにした方法とする。
(もっと読む)
繊維機械
【課題】繋ぎ目の状態などを簡単にチェックできるように糸継ぎ動作を制御するチェックモードを有する。
【解決手段】給糸側からの糸Yを巻き取る巻取り手段5と、糸欠点を検出する手段32と、この糸欠点検出手段32で糸欠点を検出したときに、糸欠点を切断、除去して給糸側及び巻取側の各糸端Y1,Y2を繋ぐ糸継ぎ手段7とを備え、巻取り手段5及び糸継ぎ手段7の動作を司る制御手段15を備え、この制御手段15は、糸継ぎ手段7による各糸端Y1,Y2の糸継ぎ動作の途中又は終了後に、糸継ぎ手段7及び巻取り手段5の動作を中止するよう制御するチェックモードを有している。
(もっと読む)
紡績機械用の練条機
【課題】本発明は練篠機に関し、重合スライバのドラフトをさらに改善することを目的とする。
【解決手段】紡績機械用の練条機、特に綿、化学繊維などのための自動調節練条機で、それぞれ固有の電動機14で駆動されるローラを備えた相前後する少なくとも2つのローラ対10, 11を有し、前記電動機が接続された電子制御調節装置が設けられている。重合スライバのドラフトをさらに改善 するために、第1の電動機によって駆動される1つ以上のローラにはフリーホイール13が付属しており、別の電動機17によって駆動される1つ以上のローラには増分型回転変位センサ18が付属している。
(もっと読む)
異常錘特定装置および紡績機
【課題】毛羽変動異常の監視において、毛羽変動異常の判定精度を高めようと判定条件を厳しくすれば、糸品質上差し支えのない変動部位まで、切除すべき異常部位として扱うことになってしまう。
【解決手段】異常錘特定装置10に、各錘のHD値(糸太さの分散)を算出する単錘偏差算出手段11と、AHD値(全錘平均のHD値)を算出する全錘偏差算出手段12と、各錘のHD値が、AHD値を基準とする許容範囲を超えたか否かを判断する逸脱有無判断手段13と、同一の錘のHD値が2回連続して、許容範囲を越える場合に、その錘に糸物性異常が発生したと判定する錘間糸物性異常判定手段14と、各錘でHD値の移動平均したHDA値を算出する平均単錘偏差算出手段15と、HDA値が、HDA値の基準値であるHDAS値を基準とした許容範囲を超えたか否かを判断する錘内糸物性異常判定手段16と、を備える。
(もっと読む)
1 - 20 / 30
[ Back to top ]