
Fターム[5B050BA01]の内容
Fターム[5B050BA01]の下位に属するFターム
リモートセンシング(衛星・航空画像) (108)
断層撮影、非破壊検査(CT) (225)
3次元観測画像(2眼像)解析 (337)
Fターム[5B050BA01]に分類される特許
21 - 40 / 62
撮像装置、画像検索方法及びプログラム
【課題】画像検索をより容易に行う。
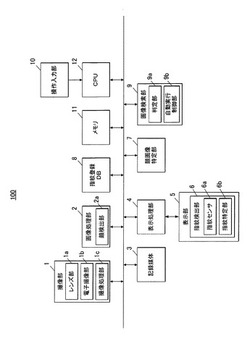
【解決手段】複数の画像を記録する記録媒体3と、複数の人物の各々について顔画像データと指紋データとを対応付けて記憶する指紋登録DB8とを備える撮像装置100であって、指の指紋を検出して指紋データを生成する指紋検出部6と、生成された指紋データと対応付けられて指紋登録DBに記憶されている顔画像データを特定する顔画像特定部7と、特定された顔画像データに係る顔を画像から検出する顔検出部2aと、記録媒体に記録されている複数の画像の各々について、顔検出部により顔が検出された否かを判定する判定部9aと、顔が検出されたと判定された画像を検索結果として表示する表示部5と、を備える。
(もっと読む)
医用三次元画像表示装置

【課題】 操作効率が良好で三次元立体構造の把握が容易な医用三次元画像表示装置を提
供する。
【解決手段】 医用三次元画像を表示可能な表示手段を備えた医用三次元画像表示装置に
おいて、前記医用三次元画像の表示操作をするための原点位置を任意に指定可能な原点指
定手段と、前記原点指定手段により指定された原点位置に表示の原点を変更する原点変更
手段と、を備えること特徴とする医用三次元画像表示装置により、三次元構造を理解し易
い画像を提供でき、また、注目領域を画像上で殆ど移動することなく回転させることがで
き、また、注目領域に他の部位が重なって観察し難いという事態を回避できる。
(もっと読む)
画像合成装置および方法
【課題】ARの技術を利用して、カメラで撮影された実写画像に含まれる対象物体の画像を実写画像から仮想的に消去することのできる画像合成装置を提供する。
【解決手段】画像合成装置1は、コピーマーカ2の位置を利用してサンプリング領域を設定し、サンプリング領域に含まれる画像からテクスチャを生成する。そして、画像合成装置1は、ペーストマーカ3の位置に合わせて、このテクスチャがシームレス化されて貼り付けられた仮想平面を実写画像に合成することで、対象物体4の画像を実写画像から仮想的に消去する。
(もっと読む)
仮想映像表示システム及び仮想映像表示方法
【課題】マーカや姿勢センサを用いることなく、簡易的に拡張現実感を作り出す仮想映像表示システムを提供する。
【解決手段】撮像部20と、前記撮像部20と所定の位置関係で配置されたスクリーン21と、映像オブジェクトが記憶された映像オブジェクト記憶部30と、撮像部20で撮影された実映像に対応して、前記映像オブジェクト記憶部30から所定の映像オブジェクトを読み出し、当該映像オブジェクトを所定の視点から眺めた基準仮想映像に基づいて任意の視点から眺めた仮想映像を生成する仮想映像生成部31と、仮想映像を前記スクリーン21に表示する仮想映像表示部32を備えた仮想映像表示システム1で、所定の時点で前記撮像部20の視点から眺めた前記基準仮想映像に基づいて、当該実映像の特徴点から算出される前記撮像部20の視点の変位に対応した仮想映像を生成するように前記仮想映像生成部31を構成する。
(もっと読む)
室内調度品購入支援システム、方法、プログラム、媒体
【課題】本発明の課題は、絵画の寸法に対応した額縁デザインの画像を合成でき、携帯端末装置が限定されず柔軟のあるシミュレーションを提供する室内調度品購入支援システムを提供することである。
【解決手段】カメラ部が作成した絵画と基準マーカを含む動画像から順次にフレームを取得し、そのフレームが第1フレームであれば、基準マーカを用いて、第1フレームを正規化して、絵画を検出して、絵画の位置と特徴点と特徴点の位置を絵画追跡辞書に登録し、取得したフレームが第2フレーム以降のフレームであれば、画追跡辞書の絵画位置を用いて、このフレームにおける絵画位置を予測して、絵画を予測検出して、絵画追跡辞書を更新し、絵画追跡辞書の特徴点位置と絵画検出辞書の特徴点の座標と透視変換行列とを用いて、額縁画像を座標変換してフレームに合成して額縁シミュレーション動画像を表示することを特徴とする額縁選択装置である。
(もっと読む)
独立偏位修正画像セットおよび方法
【課題】 従来、重複撮影航空写真(デジタル写真)は、情報が多く取得される。前記情報を最大限活用する工夫が強く望まれている。また、目的とする情報を得るための時間の短縮、工程の簡素化、コスト低減、情報の種類の多様化等々、近来の急速な環境変化に対応した新しいニーズに答えることが要求されている。
【解決手段】 重複撮影された空中写真画像を、基準面に対して鉛直方向に射影変換を実施して前記基準面の平行面上に得られた独立偏位修正画像であって、同一の注視点を含む複数の前記独立偏位修正画像を含む独立偏位修正画像セットを提供する。
(もっと読む)
カメラパラメータ推定装置、カメラパラメータ推定方法、カメラパラメータ推定プログラムおよびそのプログラムを記録した記録媒体
【課題】カメラパラメータが微小に変化したとき、参照物体を利用することなく、その時間変化量を推定することができるカメラパラメータ推定装置を提供する。
【解決手段】空間中のある位置Xに用意した被写体上の3次元点をカメラで取得した画像中に投影したときの、当該カメラ固有の内部情報に対する画像座標上での変化量を得る勾配係数処理部3と、時系列中のある時刻tでの画像上における濃淡変化を反映した空間勾配と、時刻tの画像と時刻t+Δtの画像との間の時間的濃淡変化を反映した時間勾配を得る時空間勾配処理部2と、前記空間勾配と時間勾配、並びに画像座標上での変化量が満たす時間間隔Δtの間の拘束条件を使って、カメラ固有の内部変数をパラメータとした投票空間の、その拘束条件を満たすパラメータが示す場所に投票し、得票値が極大となるパラメータをカメラ固有の内部情報の時間的変化量とするカメラパラメータ推定部4とを備える。
(もっと読む)
画像処理システム、画像処理方法、およびプログラム
【課題】異なる方向から撮像された同一物体を高速に検索することができる画像処理システムを提供すること。
【解決手段】画像処理システムは、物体を表現する3次元モデルである基準モデルを格納するモデル格納部と、物体が撮像された複数の撮像画像の画像内容に基づいて、複数の撮像画像に撮像されている物体に適合する3次元モデルである物体モデルを生成するモデル生成部と、複数の撮像画像を、当該複数の撮像画像にそれぞれ撮像されている物体のそれぞれに適合する物体モデルと基準モデルとの間の差分情報に対応づけて格納する画像格納部と、新たな撮像画像を取得する画像取得部と、新たな撮像画像に含まれる物体に適合する物体モデルと基準モデルとの間の差分情報に予め定められた値より高い一致度で一致する差分情報に対応づけて画像格納部が格納している撮像画像を選択する画像選択部とを備える。
(もっと読む)
情報処理装置、および情報処理方法、並びにコンピュータ・プログラム
【課題】効率的かつ確実な3次元画像データ生成処理を実現する構成を実現する。
【解決手段】画像に含まれる画素の3次元位置決定処理として実行する3次元画像データ生成処理に適用する画像の選択処理に際して、画像フレーム各々について、特定の参照画像フレームに対する3次元画像データ生成に適する画像であるか否かを判定し、適切と判定した画像のみを候補画像として選択し、さらに候補画像を複数組み合わせて設定した画像セットから、3次元画像データ生成処理に適用する最適な画像セットをベストセットとして選択し、このベストセットを利用した3次元画像データ生成処理を実行する構成とした。
(もっと読む)
画像処理装置及び方法、運転支援システム、車両
【課題】拡張鳥瞰図画像上における画像の欠落を抑制する。
【解決手段】運転支援システムは、視点変換を用い、車載カメラから得られるカメラ画像より、第1及び第2要素画像の合成画像に相当する拡張鳥瞰図画像を生成して表示する。第1要素画像は車両近辺の様子を表す鳥瞰図画像であり、第2要素画像は車両遠方の様子を表す遠方用画像である。拡張鳥瞰図画像はカメラ画像を仮想カメラの視点から見た画像に変換したものであり、第1要素画像の生成時における仮想カメラの俯角は90度であり、第2要素画像のそれは90度未満である。実際のカメラの傾き角度等に応じて拡張鳥瞰図画像を生成した際、画像の欠落が発生しているか否かを自動的に判定し、画像の欠落が発生している場合、その欠落がなくなるように、第1及び第2要素画像の境界線の位置や仮想カメラの視点の高さなどを調整する。
(もっと読む)
都市景観の3次元動画生成および閲覧システム
【課題】 実画像を用いた都市景観3次元動画を提供するシステムおよびサービスを提供する。
【解決手段】 航空機搭載および車載等の複数のディジタルカメラにより都市を上空ないし地上から高密度に多方向から撮影するシステムと、これらの画像をデータベース化すると同時に、任意の都市の位置に対して任意の視点経路と視線方向に対応した画像を検索するシステムと、検索した画像を実際の視点と撮影済み画像との視差に対応してモーフィング処理により連続した滑らかな3次元動画に生成するシステムを含むことを特徴とする都市景観3次元動画アミューズメントシステム。
(もっと読む)
監視システム、人物検索方法
【課題】 監視システムにおいて精度の高い人物検索方法を提供する。
【解決手段】画像を録画する監視システムで、録画した画像の画像データに加えて、映像IDと、撮影時刻情報と、撮影位置情報とを記憶する。さらに、録画した画像に撮影された人物の顔特徴量と、着衣情報とを記憶する。ここで、検索対象画像から、顔特徴量と、着衣情報と、撮影時刻情報と、撮影位置情報とを算出する。その撮影時刻情報、撮影位置情報、前記着衣情報のうちいずれかに対する重み値を用いて、検索対象画像と録画した画像に撮影された人物の同一性を判断する。
(もっと読む)
多眼視画像作成システム及び多眼視画像作成方法
【課題】左右2枚の2眼視ステレオ画像から中間位置画像と共に左右外側画像も自動的に作成することができる多眼視画像作成システム及び方法を提供する。
【解決手段】本発明は、左右2枚のステレオ画像に対して、左目画像、右目画像のいずれか一方のステレオ画像を基準にして他方のステレオ画像との間でパターンマッチングを実施し、画素毎のマッチング画像を特定し、左右の画素毎のマッチング画像間で画素間距離の内挿によって中間位置画像を求め、左右の画素毎のマッチング画像間で画素間距離の外挿によって右外画像、左外画像を求める多眼視画像作成システム及び方法を特徴とする。
(もっと読む)
画像処理コントローラ用のプログラム作成装置
【課題】 画像処理のパラメータを変更した際の動作確認を容易化した画像処理コントローラ用のプログラム作成装置を提供する
【解決手段】 カメラ画像に基づいて判定信号を出力する画像処理コントローラ11の制御プログラムを作成するプログラム作成装置であって、パラメータが変更可能な画像処理をそれぞれ示す複数の処理ユニット48を配列することによって生成されたフローチャート47を表示するフローチャート表示部201と、フローチャート47に基づいて制御プログラムを生成するプログラム生成部202と、制御プログラムを画像処理コントローラ11へ転送する転送部203と、制御プログラムを実行するシミュレーション部205と、実行された処理ユニットごとの処理結果を保持する処理結果記憶部206と、フローチャート47上で選択された処理ユニットのパラメータ及び処理結果を表示する第1の処理結果表示部207により構成される。
(もっと読む)
物体の三次元形状を光学的に測定する方法
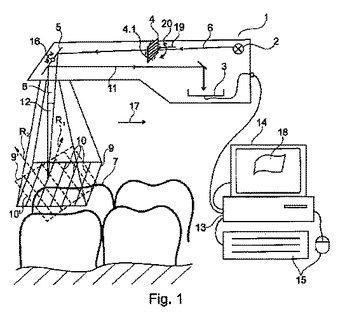
本発明は、3Dデータセットを得るために被走査物体(7)上にパターン(9、9’)を投影し、投影パターン(9、9’)を画像(40、41)に記録する、三角測量法によって物体の三次元形状を光学的に測定する方法に関する。少なくとも1枚の第1の画像(40)を作成する第1の工程において、第1のパターン(9)を投影し、少なくとも1枚の別の画像(41)を作成する第2の工程において、位置または形状に関して第1のパターン(9)からずれている別のパターン(9’)を被走査物体(7)上に投影して画像(41)を作成する。第1の画像(40)と別の画像(41)は、少なくとも1つの共通点(44)を含む。前記画像(40、41)から得られた3Dデータが3Dデータセットにおける共通点(44)の3Dデータを基準にして少なくとも一致するように、少なくとも1つの共通点(44)の3Dデータに基づいて、画像(40、41)から得られた3Dデータを次の工程で合成する。
 (もっと読む)
(もっと読む)
監視装置
【課題】トリガが発生している画像をより短時間に検索することができる監視装置を提供する。
【解決手段】制御手段20は、それぞれの画像データと当該画像データに関する情報を含むヘッダ情報とが組み合わされた画像情報を記憶手段30に順次記憶し、当該記憶の際、トリガ信号が発生していた場合には、トリガ有情報を含むトリガ検出情報をヘッダ情報に記憶し、更に、トリガ有情報の有無にかかわらず、前回トリガ有情報を記憶したヘッダ情報の記憶位置に関する前回トリガ位置情報をヘッダ情報に記憶する。そして、トリガ信号が発生したタイミングの過去方向への検索指示が入力されると、ヘッダ情報の前回トリガ位置情報に基づいて、トリガ有情報が記憶されているヘッダ情報を、過去方向に向かって、トリガ有情報が記憶されていないヘッダ情報をスキップしながら記憶手段30から順次抽出可能である。
(もっと読む)
三次元画像処理装置
【課題】対象物の現状、及び当該対象物の不具合箇所の正確な状態を容易に把握可能な三次元画像処理装置を提供する。
【解決手段】画像処理装置Mは、対象物5の三次元モデル5aを表示するとともに、当該対象物5のひび割れなどの部位を特徴点として表示するようになっている。そして、その表示画面上でユーザによってひび割れ部位が特定されることによって、当該特定された部位に近似する点をそれぞれ結線して線形図5bを表示するとともに、その表示画面上に表示されている三次元モデル5aの面以外の面にもその線形図5bが反映されて表示されるようになっている。
(もっと読む)
環境地図の生成方法及び移動ロボット
【課題】移動ロボットにおける環境地図の生成に要する演算時間を短縮する。
【解決手段】移動ロボット100は、レンジセンサ10により得られた計測情報を用いて外部環境の3次元位置データ群を生成する。次に、過去に生成された旧環境地図及びロボット100の移動量に基づいて、3次元位置データ群に含まれる3次元位置データのうち、少なくとも、旧環境地図において障害物領域とされた領域に属する3次元位置データ、及び、旧環境地図に含まれていない未観測領域に属する3次元位置データを平面検出対象データに選択する。次に、平面検出対象データを用いて平面検出を実行する。次に、平面検出の結果を用いて、平面検出対象データに含まれる移動可能領域及び障害物領域を認識する。最後に、平面検出の結果を用いて認識された移動可能領域及び障害物領域と、旧環境地図において移動可能領域とされた領域を統合して新たな環境地図を生成する。
(もっと読む)
顕微鏡画像処理システムおよび顕微鏡画像処理方法
【課題】ユーザが、取得した複数の画像とその観察点または観察エリアとを簡単に対応付けることのできる顕微鏡画像処理方法を提供する。
【解決手段】本方法は、全エリア画像処理部が、全エリア画像(405)中の限定領域である個別画像の取得位置(410a、410b、410c)を定め、前記全エリア画像中に前記個別画像の位置を表示した、前記全エリア画像を作成し、前記個別画像の位置を表示した、前記全エリア画像を前記画像データベースに格納し、前記全エリア画像処理部が、前記個別画像の位置を表示した、前記全エリア画像を前記画像データベースから読み出し表示することを含む。
(もっと読む)
地理情報関連付け画像データ管理システムおよび地理情報関連付け画像データ管理プログラム
【課題】広範囲にわたる撮影計画を立案し、大量に画像を収集し、地理情報と関連付けて画像データを管理しておくため、一貫した撮影計画、及び画像収集・管理を行う。
【解決手段】画像を撮影時刻とともに画像データとして収集する画像データ収集手段と、画像の撮影位置座標を収集する位置データ収集手段とを搭載した移動手段を含む画像撮影サブシステムと、地図データ表示手段と、画像データ表示手段と、地図リンクの始点及び終点の通過時刻を記録するリンク始終点通過時刻登録手段とを含む画像データ編集サブシステムと、撮影計画を管理する撮影計画手段と、編集された画像データと撮影情報取り込み手段とを含む画像データ管理サブシステムと、グラフ構造データベースと、カメラ情報データベースと、計画・実撮影情報データベースと、収集画像データベース及び収集画像属性情報データベースと、リンク関連情報データベースとを含む記憶装置とを含む。
(もっと読む)
21 - 40 / 62
[ Back to top ]