
Fターム[5B050BA04]の内容
Fターム[5B050BA04]に分類される特許
1 - 20 / 337
投影システム及び方法
画像処理装置、画像処理方法および画像処理プログラム
【課題】視差画像をより高い精度で補正できる画像処理装置、画像処理方法および画像処理プログラムを提供する。
【解決手段】画像処理装置は、被写体を異なる視点で撮像することで取得された少なくとも2つの入力画像から視差画像を生成するための視差画像生成手段と、視差画像生成手段によって生成された視差画像に含まれる画素についての信頼度を算出するための信頼度算出手段と、視差画像生成手段によって生成された視差画像を補正して出力するための視差画像補正手段とを含む。視差画像補正手段は、視差画像生成手段によって生成された視差画像に含まれる被補正画素の周辺にある画素の信頼度および色情報に基づいて、当該被補正画素についての補正画素候補としての適性を算出するための適性算出手段と、算出された適性に基づいて、当該被補正画素の補正に用いる画素を決定するための決定手段とを含む。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム

【課題】距離画像や視差画像に含まれるエラーを低減する補正処理を行う画像処理装置、方法を提供する。
【解決手段】被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、距離画像と、ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、距離画像合成部は、エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で距離画像とノイズ低減距離画像の合成比率を設定した合成処理を実行して補正距離画像を生成する。
(もっと読む)
ステレオ3次元計測装置
【課題】真に最適なパラメータ群を得ることができ、精度の高い3次元計測を可能にするステレオ3次元計測装置を提供する。
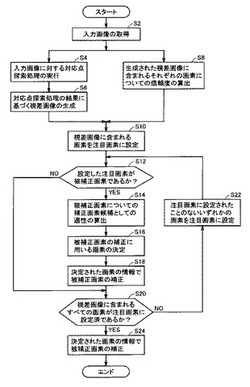
【解決手段】ステレオ3次元計測装置1は、第1,第2のカメラ21,22で計測対象物の画像を複数取得する画像取得部2と、画像取得部2から複数の画像を受けて補正するステレオ平行化部32と、ステレオ平行化部32で補正された複数の画像同士の対応点を探索して、対応点に基づいて複数の画像の評価値を算出する対応点探索部33と、画像取得部2および対応点探索部33に、予め準備しておいた複数のパラメータ群を順次入力して、上記評価値に基づいて複数のパラメータ群の中から最適なパラメータ群を選択するパラメータ選択部4とを備える。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】2眼カメラの横持ち撮影、縦持ち撮影いずれの場合にも3D表示可能なステレオ画像を出力可能とした装置、方法を提供する。
【解決手段】異なる視点から撮影された左眼画像と右眼画像を入力画像として入力する画像入力部と、入力画像の撮影時のカメラの角度に応じた制御信号を出力する撮影角度判定部と、制御信号が、2眼カメラの横持ち撮影による横持ち撮影画像であることを示す場合、前記入力画像である左眼画像と右眼画像を出力し、記制御信号が、2眼カメラの縦持ち撮影による縦持ち撮影画像であることを示す場合、左眼画像または右眼画像のいずれか一方の画像をステレオ画像生成処理部に入力し、ステレオ画像生成処理部において1枚の画像に基づく2D3D変換処理によって生成した左眼画像と右眼画像を出力する。
(もっと読む)
表示制御装置および方法、並びに表示装置
【課題】視差を有する画像における画素の配列の変換の際に、画質の劣化を抑えて変換することができるようにする。
【解決手段】複数の視点の平面画像のそれぞれを構成する画素の配列を変換するとともに、画素の配列が変換された複数の視点の平面画像を合成して立体表示用画像を生成し、複数の視点の平面画像のそれぞれを構成する画素のサブピクセルである視点画像サブピクセルと、立体表示用画像を構成する画素のサブピクセルである立体表示サブピクセルとを対応づけ、視点毎に、平面画像から抽出された視点画像サブピクセルに基づいて、変換前のサブピクセルの値をサブピクセルの色毎に決定し、決定された変換前のサブピクセルの値に基づいて、変換後のサブピクセルの値を求めることで当該視点画像サブピクセルに対応付けられた立体表示サブピクセルを生成する。
(もっと読む)
画像処理装置、撮像装置、画像処理プログラムおよび撮像装置の制御プログラム
【課題】口径食に起因して瞳の周辺部を通過する光束が撮像素子の周辺部に到達しないという課題がある。
【解決手段】画像処理装置は、同一シーンに対して互いに視差を有する複数の視差画像データを取得する画像データ取得部と、複数の視差画像データのうちの少なくとも一部の視差画像データに対して、他の視差画像データと大きさが異なる有効画像領域を定める領域制定部とを備える。あるいは、撮像装置は、同一シーンに対して互いに視差を有する複数の視差画像データを生成するための視差画像信号を出力可能な撮像素子と、複数の視差画像データのうちの少なくとも一部の視差画像データが、他の視差画像データと大きさが異なる有効画像領域を有するように、視差画像信号の出力を制御する出力制御部とを備える。
(もっと読む)
立体画像処理装置、立体画像処理方法、及び立体画像処理プログラム
【課題】画像が表す各物体までの距離を視聴者に容易に把握させることができる。
【解決手段】物体情報抽出部は、立体画像を表す立体画像信号から物体毎の画像を表す物体情報を抽出し、案内画像生成部は、前記抽出された物体情報が表す物体の視点からの距離を視聴者が把握しやすくするための案内画像を表す案内画像信号を生成し、画像信号合成部は、前記生成した案内画像信号が表す案内画像を前記物体の少なくとも一部を占める領域に前記立体画像信号が表す画像と合成する。
(もっと読む)
画像マッチング装置及び画像マッチングプログラム
【課題】特徴ベースの画像マッチングにおいて、特徴箇所の減少を防ぐことができる画像マッチング装置を提供する。
【解決手段】入力したクエリ画像群と、予め保存されている検索対象画像とのそれぞれから特徴箇所を抽出し、抽出した特徴箇所毎に局所記述子を算出して特徴データとして出力する特徴表現手段と、クエリ画像群の特徴データを統合し、統合結果特徴データとして出力する特徴統合手段と、統合結果特徴データと、検索対象画像の特徴データとの間で各々の特徴箇所の局所記述子のベクトル間距離値に基づくスコア値を算出し、クエリ画像の特徴箇所に対応する検索対象画像のスコア値に基づきマッチング画像を出力する照合手段とを備えた。
(もっと読む)
三次元モデルの作成方法
【課題】
実際の地形および地物の形状を精度良く再現する三次元モデルの作成方法を提供する。
【解決手段】
本発明の三次元モデルの作成方法は、デジタルカメラ、GPSおよびIMUを搭載した飛行体により地上の航空写真を撮影する工程と、レーザスキャナ、GPSおよびIMUを搭載した飛行体により地物1および地形2を測量する工程と、レーザスキャナ、GPS、IMU、デジタルカメラおよびオドメータを搭載した車両により地物1および地形2を測量する工程と、地上型レーザスキャナにより地物1および地形2を測量する工程と、上記各測量の測量データを解析し、それぞれの三次元データを取得する工程と、各三次元データの合成及びメッシュ化を行う工程と、を含む。
(もっと読む)
3次元形状計測装置
【課題】対象物体の全周3次元モデルの計測に必要な情報を短時間に取得する。
【解決手段】スタジオ装置10は、パネル101〜105が側面及び上面に配置され接合されて底面が開放された形状の筐体に対して、筐体内部を複数方向から選択的に照射する照明装置111〜118を配備すると共に、筐体内部を複数方向から撮影する撮影装置121〜125を配置し、底面側から対象物体に被せて使用する。演算制御装置20は、照明装置111〜118に筐体内部を複数方向から選択的に照射させ、照射の切り替えに応じて任意の撮影装置の撮影画像を取得し、これらの撮影画像から対象物体の形状を示す3次元情報を演算し、この3次元情報に基づいて全周3次元モデルを作成する。表示装置30は演算制御装置20で作成された全周3次元モデルを表示する。
(もっと読む)
奥行き製作支援装置、奥行き製作支援方法、およびプログラム
【課題】立体物の内部にも立体感(丸み)がある奥行き画像を精度良く、かつ、効率的に製作することを支援する奥行き製作支援装置等を提供する。
【解決手段】奥行き製作支援装置1は、設定奥行き値を最小値とし、設定奥行き値+丸み付け厚みを最大値とし、マスク領域の各画素値を設定する。また、輪郭から丸み付け範囲内の画素値については、所定の数式に基づいて補間を行う。例えば、奥行き製作支援装置1は、距離マップから骨格を検出し、骨格以外の画素について、骨格までの最小距離を代入した骨格距離マップを作成する。次に、距離マップおよび骨格距離マップを用いて、各画素における骨格への接近度を算出し、骨格への接近度を含む所定の数式に従った補間を行い、マスク領域の輪郭から丸み付け範囲内の画素値を算出する。
(もっと読む)
立体パノラマ映像を生成する装置及び方法
【課題】 1つのカメラだけを用いて立体3Dパノラマ映像を生成する装置及び方法に関する。
【解決手段】 N番目のビデオフレームで第1フレームスリットをキャプチャーして、N+2番目のビデオフレームから第2フレームスリットをキャプチャーするフレームスリットキャプチャー部と、前記キャプチャーされた第1フレームスリットと前記キャプチャーされた第2フレームスリットとを用いて左側映像を生成する立体映像生成部と、を含み、前記フレームスリットキャプチャー部は、N+1番目のビデオフレームで第3フレームスリットをキャプチャーして、N+3番目のビデオフレームで第4フレームスリットをキャプチャーして、前記立体映像生成部は、前記第3フレームスリット及び前記第4フレームスリットを用いて右側映像を生成してもよい。
(もっと読む)
三次元データ処理装置、方法及びプログラム
【課題】建造物を現物計測して得た点群データを、各構成部品に切り分けて、三次元座標上で操作可能とする三次元データ処理技術を提供する。
【解決手段】三次元データ処理装置は、取得した点群データ51及びCADデータを三次元座標に重ね合わせる重ね合わせ部と、CADデータのCAD部品に対応する点群データ51のセグメント55(55a〜55h)を抽出するセグメント抽出部と、三次元座標においてセグメント55(55a〜55h)を操作するセグメント操作部と、を備える。
(もっと読む)
立体画像生成装置及び立体画像生成方法
【課題】複数視点映像信号によって3D画像を表示する際に書き割り現象が生じるような構図であっても、個々の被写体の立体感を改善することができる立体画像生成装置を提供する。
【解決手段】3D視差値検出部13は、立体映像信号における左目画像信号と右目画像信号との間の視差値DPTを検出する。立体度判定部14は、視差値DPTに基づいて立体映像信号の立体度Fを判定する。書き割り度判定部15は、視差値DPTに基づいて書き割り度Kを判定する。画像信号変換部16は、立体度F及び書き割り度Kに応じて、左目画像信号または右目画像信号の画素をシフトさせる画素シフト量を求め、画素シフト量だけ画素をシフトさせる。これによって、左目画像信号または右目画像信号の視差を調整する。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】部品91の三次元認識を正確に実行する。
【解決手段】互いに異なる場所から部品91を撮像した2枚の撮像画像I1、I2に対してステレオマッチング処理が実行されて、2枚の撮像画像I1、I2間の視差pを示す視差画像Isが取得される。また、撮像画像I1からエッジEが抽出されて、部品91のエッジEを示すエッジ画像Ieが取得される。そして、エッジ画像Ieが示す部品91のエッジE上の位置での視差pが、視差画像Isに含まれる視差pから抽出されるとともに、こうして抽出された視差pに基づいて、三次元における部品91の位置および姿勢が認識される。これにより、部品91のエッジE部分の視差pに基づいて、三次元における部品91の位置および姿勢を認識することが可能となり、その結果、この三次元認識を正確に実行することが可能となる。
(もっと読む)
森林地立体画像生成方法
【課題】 平面的なカラー写真を用いないで、森林の各樹木に立体感があって、かつ表層下の状況も一目で把握させることができる森林地立体画像生成方法を得る。
【解決手段】
DEMを記憶したデータベース10とDSMを記憶したデータベース11とDHMデータ作成部12とDSM赤色立体画像作成部14とレースケール画像化部16と緑系色画像化部18と乗算部23等を備えて、樹木の樹木高に応じた色をその樹木に割りあてた画像(樹高区分図)を作成して、これを立体的にした森林地立体画像と称する。
(もっと読む)
ゲーム装置、ゲーム装置の制御方法、ならびに、プログラム
【課題】ゲーム世界を表す仮想空間に配置されるオブジェクトの輪郭を描画する。
【解決手段】ゲーム装置201において、生成部202は、ゲーム世界を表す仮想空間内に配置される複数のオブジェクトを当該仮想空間内に設定される視点から当該仮想空間内に設定される視線方向に見た様子を表す第1画像と、複数のオブジェクトのうち当該第1画像における各画素位置に描画されている箇所の視点に対する奥行を表す奥行値を各画素位置における画素値とする第2画像と、を生成する。抽出部203は、第2画像に輪郭抽出フィルタを適用することにより、第3画像を得る。描画部204は、第1画像を背景として、第3画像により表される輪郭を描画することにより、第4画像を得る。
(もっと読む)
立体画像作成方法
【課題】 レンチキュラーレンズや2次元レンズアレイを使って表示する立体像における視域の制限を無くすため、一定の奥行きに一定の間隔でオブジェクトの像を並べる手法がある。ただ従来の画像作成方法では、オブジェクト像の配列や奥行きに変化を付けることが難しく、表現の幅を広げることが困難であった。
【解決手段】 元となる多視点像が切れ目のないループ関係を持つように、所定の条件を付けて多視点像を作成し、これらを元に良く知られた多眼式の手法によって立体画像を作成する。本手法によっても従来法と同等な立体画像を作成することができ、さらに元画像に様々な工夫を加えることでオブジェクト像の配列を傾斜させたり、奥行きに変化を付けるなど、従来法では困難であった表現が実現できる。
(もっと読む)
ズーミング可能なステレオフォトビューア
【課題】立体写真の閲覧の際に、ズームインで融像が2重像に乖離せず、自然な融像を閲覧できるズーミング可能なステレオフォトビューアを実現する。
【解決手段】閲覧者に、左目用と右目用画像とを提示する立体表示装置と、画像の表示制御装置と、を備え、左目用と右目用画像とを閲覧者に提示する。表示された左と右画像の間隔Dは、ズームイン(ズームアウト)の倍率mに従って変化させることで、融像位置が、動かないか手前に(奥に)移動するようにする。特に、αおよびβを定数、0≦nとして、D=α×(1−β×m)n+1/mnとする。また、ズーミングは、倍率mの関数として、左右の立体写真の端点間の距離tを変化させることで行う。また、0≦nとして、c、b、kを定数として、距離tは、c×(1/m−k)n+1+bとなる倍率mの関数とし、ズームイン、ズームアウトの限界点で定数a、b、kを決める。
(もっと読む)
1 - 20 / 337
[ Back to top ]