
Fターム[5B050BA07]の内容
Fターム[5B050BA07]に分類される特許
41 - 60 / 614
プログラム、情報記憶媒体及び画像生成システム
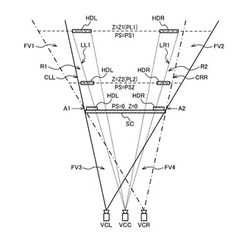
【課題】立体視用画像における情報表示物の適切な立体視表示を可能にするプログラム、情報記憶媒体、画像生成システム等の提供。
【解決手段】画像生成システムは視差強度設定部と画像生成部を含む。画像生成部は、第1の視差強度に設定された場合、第1の奥行き位置に情報表示物が立体視表示され、第2の視差強度に設定された場合、第2の奥行き位置に情報表示物が立体視表示される立体視用画像を生成する。そして第1の視差強度が設定された際の情報表示物の第1の端部と第3視点とを結ぶ線分により規定される境界面を第1の境界面とし、第1の境界面と第1のクリッピング面の間の領域を第1の領域とした場合に、第2の視差強度が設定された場合、情報表示物の第1の端部が第1の領域に立体視表示される立体視用画像を生成する。
(もっと読む)
情報処理プログラム、情報処理装置、情報処理システム、及び、情報処理方法

【課題】本発明は、立体視画像により表現される仮想空間をより適切にユーザに把握させることを可能にすることを課題とする。
【解決手段】本発明は、立体視表示可能な表示装置に所定の仮想空間の表示を行う情報処理装置のコンピュータで実行される情報処理プログラムであって、コンピュータを、仮想空間においてオブジェクトの位置を制御する位置制御手段と、仮想空間に設定された複数の領域のうち、オブジェクトの位置する領域を判定する領域判定手段と、判定された領域に応じて、立体視画像の描画に用いられる立体視パラメータを設定するパラメータ設定手段と、立体視パラメータに基づいて、オブジェクトを含む立体視画像を生成する画像生成手段と、生成された立体視画像を表示装置に表示させる表示制御手段として機能させる情報処理プログラムである。
(もっと読む)
画像生成プログラム、画像生成方法、画像生成装置及び画像生成システム
【課題】画像生成プログラム、画像生成方法、画像生成装置及び画像生成システムの操作性を向上する。
【解決手段】仮想空間内のオブジェクトの位置や姿勢に応じて仮想カメラを設定する。所定の操作がされている間は、表示装置に備えられた角速度センサを用いて、当該表示装置の姿勢を検知し、検知した姿勢に基づいて仮想カメラの姿勢を変更する。当該所定の操作がされていないときには、仮想カメラはオブジェクトの位置や姿勢に応じて決まる元の姿勢となる。
(もっと読む)
プログラム、情報記憶媒体、情報処理システム及び情報処理方法
【課題】情報処理システムにおける仮想空間内に配置されているオブジェクトが移動する様子の表現が不自然になるおそれを低減する。
【解決手段】オブジェクト配置管理部44は、移動対象のオブジェクトの現在位置に基づいて、移動対象のオブジェクトの移動先の基準となる基準位置、及び、移動対象のオブジェクトの移動先の候補となる複数の候補位置を決定する。オブジェクト配置管理部44は、複数の候補位置のうちの少なくとも一部を、当該候補位置と仮想空間内に配置されている他のオブジェクトの位置との関係に基づいて変更する。オブジェクト配置管理部44は、少なくとも一部について位置が変更された複数の候補位置のうち基準位置から最も近い位置に、移動対象のオブジェクトの位置を変更する。
(もっと読む)
電子白板装置
【課題】表示内容の消去のための操作を格別に行うことなく、以前より表示されている表示内容を消去して、タッチペンの軌跡等を表示部の画面に表示することが可能な電子白板装置を提供する。
【解決手段】第1描き込み消去動作モードでは、画面SCにタッチペン3のペン先の移動軌跡を表示して、画面SCにおけるタッチペン3のペン先を中心とする一定の消去範囲の以前より表示されている表示内容を消去する。更に、第2描き込み消去動作モードでは、画面SCにタッチペン3のペン先の移動軌跡を表示して、ペン先の移動軌跡を包含する矩形状の消去範囲を求め、矩形状の消去範囲の以前より表示されている表示内容を消去する。
(もっと読む)
環境認識装置および環境認識方法
【課題】曲線を描いたり、それ自体が傾斜したりする対象物の特定効率および特定精度の向上を図る。
【解決手段】環境認識装置130は、検出領域内を分割した複数のブロック毎の輝度を取得し、ブロック毎の輝度のエッジが伸長する方向に基づくエッジ方向を導出し、エッジ方向に基づいてブロック同士を関連付け、エッジ軌跡を生成し、複数のエッジ軌跡により囲まれる領域をグループ化して対象物とし、対象物を特定物として決定する。
(もっと読む)
画像生成装置及びその制御方法、プログラム、及び記録媒体
【課題】地図の縮尺の変更に対応して、画像を地図上の適切な位置に配置する方法を提供する。
【解決手段】地図上に配置する画像について、配置位置を、第1の縮尺では予め定められた第1の配置位置に決定する。また、第1の縮尺よりも大きい第2の縮尺では、当該第2の縮尺の地図において第1の配置位置に対応する位置よりも、画像の撮影場所に近い第2の配置位置に配置位置を決定する。
(もっと読む)
情報表示装置、情報表示方法、情報表示プログラムおよび記録媒体
【課題】確実なルート案内を実現すること。
【解決手段】ナビゲーション装置100の生成部104が、現在位置情報取得部101によって取得された現在位置に関する情報と、ルート情報取得部102によって取得されたルート情報と、記憶部103に記憶されたノード情報、リンク情報と、に基づいて、ルートに沿って連続した帯状のルート表示画像であって路面から所定の高さに表示されるような上空ルート案内表示画像を生成し、表示部106が、映像取得部105によって取得された移動体(自車)のルート上の前方映像上に、生成された上空ルート案内表示画像を重ねて表示したり、フロントウインドウに投影したりする。
(もっと読む)
アニメーション生成装置、テレビジョン受像機、アニメーション生成方法、プログラム、および記録媒体
【課題】アイコンが移動する際の視認性を向上させることのできる表示制御装置を提供する。
【解決手段】本発明に係るアニメーション生成装置は、アイコンが移動するアニメーションを生成するグラフィックプレーン生成部4と、アイコンの移動速度を指定する移動速度指定情報を含むコマンドを取得する受信部とを備え、グラフィックプレーン生成部4は、受信部が取得したコマンドに含まれる移動速度指定情報を参照して、アニメーションのフレームレートを設定する、ことを特徴とする。
(もっと読む)
参加型コンテンツ管理装置、視聴端末、参加型コンテンツ管理プログラム、及び視聴プログラム
【課題】ユーザにコンテンツの視聴及び参加への意欲を向上させる。
【解決手段】ネットワークに接続された複数の視聴端末に提供する参加型コンテンツを管理する参加型コンテンツ管理装置において、前記視聴端末から得られる前記参加型コンテンツへの参加要求に対して、前記視聴端末に対する識別情報と前記参加型コンテンツに参加させる仮想キャラクタとを割り当てるユーザ管理手段と、前記参加型コンテンツに前記仮想キャラクタを参加させたスクリプトを生成するスクリプト生成手段と、前記スクリプト生成手段により生成されたスクリプトから映像コンテンツを生成する映像生成手段と、前記ユーザ管理手段により得られる識別情報と、前記映像生成手段により得られる映像コンテンツと、前記スクリプト生成手段により得られるスクリプトとを配信する配信手段とを有することにより、上記課題を解決する。
(もっと読む)
ナビゲーション装置
【課題】自車位置から離れた位置の地図画像を表示させたときに自車位置との位置関係の把握がしやすいナビゲーション装置を提供すること。
【解決手段】ナビゲーション装置は、自車位置を検出する車両位置検出部5と、自車位置周辺の地図画像を表示装置6に描画する地図描画部14、表示処理部16と、利用者によって表示装置6の周囲の所定範囲内の任意位置に移動が可能である表示端末装置7と、表示装置6に対して表示端末装置7の相対位置を検出する端末相対位置検出部42とを備える。自車位置と、端末相対位置検出部42によって検出された相対位置とに基づいて、表示端末装置7の画面に表示する地図画像の位置が決定され、この決定した位置周辺の地図画像が表示端末装置7に表示される。
(もっと読む)
画像表示装置及び制御方法
【課題】実写画像に基づき案内表示を行う際に、好適に障害物を透過して表示可能な画像表示装置を提供する。
【解決手段】画像表示装置は、移動体の進行方向の風景を撮影した実写画像を取得する画像取得手段と、移動体の現在位置を示す情報を取得する現在位置取得手段と、現在位置が、移動体の搭乗者によって信号機が見える位置であるかを判定する判定手段と、信号機が見える位置であると判定され、かつ、取得された画像に信号機が存在しない場合に、当該信号機の撮影を妨げる動的障害物があると判断する判断手段と、動的障害物があると判断されると、当該動的障害物と前記信号機の両方が表示されるように画像処理を施す画像処理手段と、画像処理が施された画像を表示させる表示制御手段と、を備える。
(もっと読む)
画像処理装置およびプログラム
【課題】対称性のある図形を選択領域として容易に設定できるようにする。
【解決手段】入力した分割数Nに基づいてN本の分割線を対象画像上に描画して対象画像をN個の分割領域に分割し(e)、分割領域の範囲内でユーザーから指定領域B1の指定を入力し(f)、折りたたんだ紙を指定領域の形状に切ったあとその形状の紙を広げることでできる切り絵模様の形状の領域を、指定領域B1を指定領域B2〜B6に展開することで形成し(g)、これを対象画像における選択領域として設定する(h)。
。
(もっと読む)
トリミング装置および印刷装置
【課題】対象画像を簡単な操作により所望の形状にトリミングできるようにする。
【解決手段】画像のトリミングが指示された場合、切り取り線の入力を受け付ける処理(S130,S140)と、受け付けた切り取り線で画像を分割する処理(S150)と、分割された2つの画像のうち消去対象を設定する処理(S160〜S200)と、設定された消去対象の画像を消去する処理(S210)とを繰り返すことにより画像のトリミングを行なう。この際、トリミングの繰り返し回数Nが所定回数Nref未満の場合には分割された2つの画像のうちユーザーにより指定された画像を消去対象に設定し、繰り返し回数Nが所定回数Nref以上の場合には分割された2つの画像のうち面積が小さい方の画像を消去対象に設定する。
(もっと読む)
図形描画プログラム、図形描画装置
【課題】情報処理装置における図形描画において、描画対象図形を構成する要素のサイズ及び配置位置を自動計算して配置することで、ユーザの作業負担を軽減する。
【解決手段】入力受付部11が、描画対象図形を構成する要素としてユーザが選択した選択要素に関する要素情報、要素を配置する配置領域に関する指定及び要素の配置方式(縦配置又は横配置)に関する指定を受け付ける。配置領域決定部13は、ユーザによる指定等に基づいて配置領域を特定する。配置方式決定部14は、ユーザによる指定に基づいて、配置方式を特定する。そして、要素属性計算部15は、要素情報に基づき、配置領域や配置方式に応じて、選択要素のサイズを計算するとともに、計算したサイズで各選択要素を配置した場合における各選択要素の配置位置の座標を計算する。配置部16は、各選択要素を、計算した配置位置の座標に基づいて、図形描画領域に配置する。
(もっと読む)
判定プログラム、判定装置および判定方法
【課題】落下する部品を自動的に判定すること。
【解決手段】判定プログラムは、コンピュータに、下記の処理を実行させる。すなわち、部品の形状と位置とを含む部品情報を格納する格納部から、部品情報を読み出す処理を実行させる。コンピュータに、位置を更新する更新部品を前記部品の中から特定する処理を実行させる。コンピュータに、前記更新部品と接触する接触部品を特定する処理を実行させる。コンピュータに、前記更新部品の位置を更新する処理を実行させる。コンピュータに、前記接触部品の重力方向の接触状態を検出する処理を実行させる。コンピュータに、検出した接触状態から前記接触部品の落下状況を判定する処理を実行させる。
(もっと読む)
三次元図形演算プログラム、ダイナミックリンクライブラリ及び景観検討装置
【課題】 複数の三次元図形の相貫関係に基づき各三次元図形の合成画面を生成する図形演算において、データ量の増大を抑制しつつ、精度の高い図形演算を行うことのできる三次元図形演算プログラム、ダイナミックリンクライブラリ及び三次元図形演算プログラムを実行して景観の検討を行う景観検討装置を提供する。
【解決手段】 三次元図形演算プログラムは、各三次元図形を多面体に表現する第1ステップと、多面体に表現された、一の三次元図形を構成するすべての面に関する、他の三次元図形を構成するすべての面の相貫関係を分析する第2ステップと、この相貫関係の分析結果に基づき、一の三次元図形を構成する各面において、他の三次元図形と重なり合い裏側となる部分を除去する第3ステップと、除去されなかった部分を有する面からなる三次元図形同士を合成して表示する第4ステップと、をコンピュータに実行させる。
(もっと読む)
立体映像視覚効果処理方法
【課題】立体映像視覚効果処理方法を提供する。
【解決手段】本発明としては、一種の立体映像視覚効果処理方法が提案され、該方法は、以下のステップを含み、それぞれ一つの対象物座標値を有する多数個の対象物からなる立体映像を提供するステップと、カーソル座標値を有するカーソルを提供するステップと、前記カーソル座標値が、前記多数個の対象物の前記対象物座標値のうちのいずれかと重畳するか否かを判断するステップと、前記カーソル座標値が前記多数個の対象物の前記対象物座標値のうちのいずれかと重畳する場合には、対応している前記多数個の対象物の対象物座標値の深度座標パラメーターを変更するステップと、前記カーソル座標値と相応する前記対象物の映像を再描画するステップが含まれている。よって、カーソルと対応する対象物立体映像を突出させる可能で、視覚効果の強化及び相互作用の増加に繋がる。
(もっと読む)
画像処理装置、画像処理装置の制御方法、および画像処理装置の制御プログラム
【課題】所望の形状の画像パーツを得ることのできる画像処理装置、画像処理装置の制御方法、および画像処理装置の制御プログラムを提供する。
【解決手段】MFP(Multi Function Peripheral)は、原稿の画像を読み取る画像読取部35と、画像読取部35で読み取った画像に含まれる閉ループで囲まれた領域を特定するパーツ化部53と、パーツ化部53にて特定した領域に含まれる複数のパーツの階層を判断する階層判断部55と、階層判断部55にて下位と判断したパーツの形状を補正するパーツ補正部57とを備える。
(もっと読む)
ロボット装置
【課題】 人の表情から人の情動を認識し、情動同調の手法を利用して制御するロボット装置を提供する。
【解決手段】 ユーザに視認させる表情を表出する表出部12aと、ユーザの表情に基づいてユーザの情動状態を解析する情動認識部20と、ロボットの情動状態を、情動認識部20によって認識されたユーザの情動状態に誘導するようにロボットの情動状態を生成する情動生成部22と、情動生成部22により生成されたロボットの情動状態に基づいて、ロボットから表出させる表情を生成する情動表出部24とを備える。
(もっと読む)
41 - 60 / 614
[ Back to top ]