
Fターム[5B050BA13]の内容
Fターム[5B050BA13]に分類される特許
201 - 220 / 899
ビューイングフラスタムを用いて客体に関する情報を提供するための方法、システム及びコンピュータ読み取り可能な記録媒体
本発明はビューイングフラスタムを用いて客体に関する情報を提供するための方法、システム及びコンピュータ読み取り可能な記録媒体に関する。本発明の一態様によれば、ビューイングフラスタムを用いて客体に関する情報を提供するための方法であって、(a)ユーザ端末装置を視点とする少なくとも1つのビューイングフラスタムを特定する段階、及び(b)第1ユーザ端末装置を視点とする第1ビューイングフラスタム及び第2ユーザ端末装置を視点とする第2ビューイングフラスタムが共通して含む客体を参照して前記客体に対する関心度を算出する段階を含む方法が提供される。本発明によれば、ビューイングフラスタムを参照して現実世界に存在する客体に対する関心度を自動で算出し、前記のように算出された客体の関心度に基づいて客体に対する付加情報を差別的に提供できるので、ユーザから多くの関心を受けた客体に対する付加情報を他のユーザに効果的に提供できるようになるという効果を奏する。 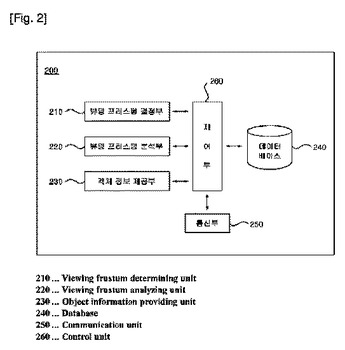 (もっと読む)
(もっと読む)
三次元画像処理装置、三次元画像処理方法および三次元画像処理プログラムを記録した媒体
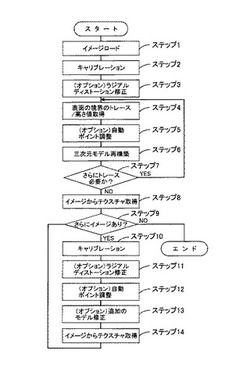
【課題】 ソフトウェアプログラムにより、自動で二次元画像から三次元オブジェクトをモデル化するという技術はいまだ成熟しておらず、十分に信頼できるものではなかった。
【解決手段】 二次元画像を読み込み、二次元画像を表示した上で、操作入力を受け付けて同画像上に三次元の基準となる位置を指定し、変換関係取得手段が三次元の実空間と二次元の像空間との間の変換関係を取得する。次に、表示画像上で、操作入力を受け付けて対象物の表面の境界の形状を、各セグメントごとに各セグメントの形状に対応した数の離散的な点位置で指定するとともに、操作入力を受け付けて高さの値を取得する。そして、各セグメントごとに指定された離散的な点位置とその数に基づいて、当該区分全体の三次元での位置情報を算出して上記境界を特定し、高さの値と、算出された各セグメントの境界の位置情報と、上記変換関係とに基づいて対象物の三次元モデルを算出する。
(もっと読む)
シーンにおける物体の姿勢を求めるための方法

【課題】通常のカメラ又はマルチフラッシュカメラのいずれかによって取得される画像内の奥行きエッジを用いた物体の検出、位置特定及び姿勢推定のための方法及びシステムを提供する。
【解決手段】シーンにおける物体の姿勢が、まず仮想カメラを用いて物体のモデルの仮想画像の集合をレンダリングすることにより求められる。各仮想画像の集合は、モデルの異なる既知の姿勢についてのものであり、各仮想画像から仮想奥行きエッジマップを作成し、データベースに格納する。未知の姿勢にある物体の実画像の集合が、実カメラによって取得され、実画像毎に実奥行きエッジマップを作成する。コスト関数を用いて実奥行きエッジマップを仮想奥行きエッジマップと比較し、未知の姿勢に最も一致する既知の姿勢を求める。この照合は奥行きエッジマップ内の画素の位置及び配向に基づく。
(もっと読む)
撮像装置、3Dモデリングデータ生成方法、および、プログラム
【課題】高精度な3Dモデリングデータを容易に生成する。
【解決手段】制御部210は、第1撮像部110と第2撮像部120で撮像する被写体について、当該被写体の明部を適正露出とする露出条件と、暗部を適正露出とする露出条件を設定する。制御部210は、設定した各露出で撮像するよう第1撮像部110と第2撮像部120を制御することで、露出の異なる画像ペアを得る。制御部210は、得られた画像ペアを構成する画像において、パターン投影部130が被写体に投影したパターンを特定する。制御部210は、特定されたパターンについて、同一露出の画像ペアを構成する画像間で、パターンの密度に基づく最適化をおこなうとともに、露出の異なる画像間で、パターンの画像状態に基づく最適化をおこなう。制御部210は、最適化されたパターンの対応点を用いて3Dモデリングデータを生成する。
(もっと読む)
オブジェクトをコンピュータスクリーン上に表示するための方法、装置、およびプログラム
【課題】コンピュータスクリーン上にオブジェクトを表示するためにコンピュータによって実行される方法を提供すること。
【解決手段】本発明に係る方法は、第1のイメージを計算するステップ(S20)と、第1のイメージを表示するステップ(S30)と、n番目の遷移イメージを計算すること(S40)、重み付けされた第1のイメージと重み付けされたn番目の遷移イメージをマージすることによって、n番目のマージ済みイメージを計算すること(S60)、およびn番目のマージ済みイメージを表示すること(S70)をk回繰り返すステップとを含む。nは、1からkまでの範囲内にあり、nおよびkは、正の整数である。
(もっと読む)
パラメータ可視化システム
作業現場上の土工機械の位置を示す三次元位置データを受信し、複数のパラメータの値を含むパラメータ情報を受信するように構成された制御装置を含むパラメータ可視化システムが開示される。複数のパラメータは土工機械と作業現場のうちの少なくとも1つのパラメータを含む。制御装置はさらに、複数のパラメータ内の第1のパラメータの値を提供するように構成された第1の表示信号を生成し、第1のパラメータの値の変更を受信し、第1のパラメータの値の変更に基づき第2のパラメータの値を計算し、作業現場の三次元視覚的描写に沿って第1のパラメータまたは第2のパラメータの少なくとも1つの値の視覚的描写を提供するように構成された第2の表示信号を生成するように、構成される。 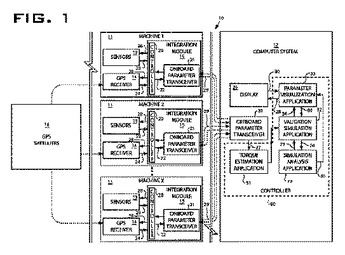 (もっと読む)
(もっと読む)
多数の地図ビルディングブロックにおけるオブジェクトの相互参照と重複排除を行う方法と装置
ディジタル地図データベースを提供するシステムと方法において、一つ以上のビルディングブロックに含まれる注目点(POI)および/または三次元(3D)オブジェクトに関連するジオコード付加オブジェクトの多数のインスタンスは、望まれない重複ジオコード付加オブジェクトを見付けるために比較される。相互参照情報は格納され、選択あるいはナビゲーション装置(10)または他の適切な計算装置の表示画面(12)上の提示に関する優先度を判定するために、使用すべきジオコード付加オブジェクトまたはオブジェクトプロパティ/属性についての優先情報が査定される。相互参照は、コンパイル時に予め計算されるか、ナビゲーションアプリケーションの実行時にオンザフライで計算され、専用のデータ構造に永続的に格納される。重複ジオコード付加オブジェクトが見付かると、最も正確な情報または(属性)情報のスーパセットがアプリケーションによって使用されるかユーザに提示され、それによって混乱が防止される。 (もっと読む)
3次元コンピュータグラフィックス用モデル生成装置
【課題】対象物の形状が簡単でなくても、また、至近距離での撮影でなくても、また、 対象物表面での光の反射が弱かったり強かったりしても、撮影に長い時間をかけずに、対象物の形状に正確な形状の3DCG用モデルを自動的に生成することが、本発明が解決しようとする課題である。
【解決手段】レンズを前または後ろにスライドさせて移動させながら連続的に画像を撮影し、どの画像でピントが合っているかを計算して各画素の位置における奥行き座標を割り出し、三次元形状を求める。
(もっと読む)
画像表示装置、画像表示方法、画像表示プログラム、画像表示プログラムを記録した記録媒体
【課題】ユーザにとって適切な画面状態で複数の画像を俯瞰することができる画像表示装置などが求められていた。
【解決手段】以上の課題を解決するため、本発明においては、画面内部の3次元仮想空間11においてひとつ分の画像13を注視する領域12を画面中央から見て一方の側によった状態で設け、仮想線14に沿った順送り処理(例えば、GUIボタン15に対する操作入力に応じた順送り処理)によりこれから注視しようとする画像のグループの画面中に占める割合を多くする構成からなる画像表示装置などを提案する。
(もっと読む)
画像処理方法、そのプログラム及び画像処理装置
【課題】各国言語ごとの表示用画像の保守・管理の負担をより低減すると共に、より確認しやすい表示内容を提示する。
【解決手段】ユーザーPC20(画像処理装置)は、第1機種設定情報31に格納された有効項目の情報などを用いて、第1国印刷ドライバー30の自機種(プリンター50)の有効項目に対応する項目画像を、所定国の言語で作成された第1国用共通リソース38(共通設定項目格納データ)から読み出し、第1国用共通リソース38に含まれる有効項目でない項目の空間を詰めて有効項目の項目画像を配置し、表示用画像を作成して表示出力する。この第1国用共通リソース38には、同一製造会社における電子機器の第1国言語で作成された項目画像をすべて格納している。このように、所定国の言語において、機種ごとに表示用画像を別々に作成することを抑制可能である。
(もっと読む)
三次元アニメーションの表示装置及びその表示装置を実現するためのプログラム
【課題】透視投影法による三次元アニメーションの表示において、仮想カメラと物体との距離が近接しすぎた場合の当該物体によって隠れる後方の物体等を見易くする。
【解決手段】透視投影法による三次元アニメーションの表示方法において、仮想カメラと物体(メインキャラクタ)との距離が所定の距離以下に近接した場合、シルエット透過処理を行う。シルエット透過処理では、物体を除いた透視投影法による二次元画像が作成され(S11)、モニタの画面上における物体の表示位置が算出される(S13)。そして、ステップS11で作成された二次元画像の、ステップS13で算出されたモニタの画面内の物体の表示位置に含まれる画素に対して、各画素の濃度が所定の割合で変更され(S14)、その二次元画像がモニタに表示される(S15)。これにより、物体はシルエットだけが表示される。
(もっと読む)
コンピュータ支援設計のシステムにおいてオブジェクトのアセンブリを設計するための方法およびシステム
【課題】設計者の生産性を高め、設計の誤りを最小限に抑えるように、オブジェクトの繰り返されるアセンブリをより容易にかつより迅速に改良するための方法およびシステムを提供する。
【解決手段】本発明は、コンピュータ支援設計のシステムにおいてオブジェクトのアセンブリを設計するための方法を対象とし、この方法は、インタフェース情報をそれぞれが有する、アセンブリの第1のオブジェクトおよび第2のオブジェクトを選択すること(20)、アセンブリの第2のオブジェクトに対する第1のオブジェクトの位置のセットを計算すること(40)、および第2のオブジェクトに対する第1のオブジェクトの計算された複数の位置の表現を同時に表示すること(90)を備える。
(もっと読む)
画像合成出力装置、カメラ付き携帯電話装置、およびプログラム
【課題】実際の撮影画像に基づいてリアリティある生物の成育画像を出力することが可能な画像合成出力装置を提供する。
【解決手段】登録ユーザにより予め指定した和風の犬小屋の登録画像(育成場所画像)R2に相当する犬小屋(R2)を含ませた画像を、該登録ユーザの端末により例えば日毎撮影してサーバ装置へ送信する。するとサーバ装置では、日毎受信される撮影画像データGnにユーザ指定の登録画像R2が含まれると判定される都度レベルアップされる成育レベルmに対応して、育成データメモリに記憶されている前記登録画像R2の種類(和風の犬小屋)に応じた生物(和犬)の画像Wma〜Wmcが読み出される。そして、この各成育レベルmに対応した生物(和犬)の画像Wma〜Wmcを前記受信された撮影画像データGnに合成した合成画像データGncが生成され、前記登録ユーザの端末に送信されて表示される。
(もっと読む)
コンピュータ支援設計のシステムにおいてオブジェクトのアセンブリを設計するための方法およびシステム
【課題】本発明は、コンピュータ支援設計のシステムにおいてオブジェクトのアセンブリを設計するための方法を対象とする。
【解決手段】この方法は、アセンブリの第1のオブジェクトおよび第2のオブジェクトを選択すること(20)であって、前記第1のオブジェクトおよび前記第2のオブジェクトのそれぞれがインタフェース情報を有することと、アセンブリの第1のオブジェクトと第2のオブジェクトの間の相対的位置のセットを計算すること(40)と、第1のオブジェクトと第2のオブジェクトの間のセットの相対的位置を、少なくとも1つの基準に従ってランキングすること(80)と、ランキングするステップに応じて、第1のオブジェクトと第2のオブジェクトの間の相対的位置のうち最良の位置をもたらすこと(90)とを備える。
(もっと読む)
シミュレーションシステム
【課題】
現実世界とほぼ同等の動作を再現可能な自律移動シミュレーションを行う。
【解決手段】
ロボットに搭載されたセンサで取得できるデータをシミュレーションするセンサシミュレーション部と、前記センサで取得した取得センサデータに、属性が付加されている点が含まれるかどうか判定し、属性が含まれている点群に対して、センサデータ補正パラメータに応じた補正を行い、補正センサデータを出力するセンサデータ補正部と、前記出力補正センサデータおよび属性反映2次元環境地図の照合処理により2次元環境地図内のロボットの位置姿勢を推定し、仮想ロボット推定位置および姿勢データを出力する仮想ロボット位置・姿勢推定部と、次の移動先を決定する移動目標位置決定部と、決定された値に応じて仮想ロボット位置および姿勢を更新する移動部、とを備える。
(もっと読む)
多感覚インタラクションシステム
【構成】 多感覚インタラクションシステム10は、全体制御を行うコンピュータ12を含み、複数の感覚情報を統合してユーザに提示することによって、仮想物体が実在しているような感覚をユーザに与える。3次元モニタ14は、仮想物体の立体映像を表示する。触覚デバイス18は、ユーザによる操作を受け付け、仮想物体に触れることよって生じる反力をユーザに与える。ヘッドホン16および嗅覚ディスプレイ20は、仮想物体からの反力に応じて、つまりユーザが仮想物体に対して能動的に与える力に連動して、音および香りをユーザに提示する。
【効果】 4つの感覚情報を緊密に連携させてユーザに提示するので、仮想物体に対するより高い臨場感や現実感をユーザに与えることができる。
(もっと読む)
携帯端末及び方法並びプログラム
【課題】印刷物、ウェブサーバ、携帯端末の全てで連動し相互作用してコンテンツを提供できる。
【解決手段】三次元コンテンツを保存し管理するデータベースを有するウェブサーバが接続されているネットワークに接続される携帯端末であって、
カメラで撮影された画像から二次元コードを認識して、この二次元コードに記載されているURLを読み取り、このURLにより、ウェブサーバのデータベースにアクセスして、ウェブサーバにデータベースから三次元コンテンツをストリーミングで配信して貰う手段と、
ウェブサーバからストリーミング配信される三次元コンテンツを受信する手段と、
カメラで撮影された画像中の二次元コードを三次元画像として認識する手段と、
三次元画像として認識した二次元コードに合わせて、受信した三次元コンテンツを、カメラで撮影された画像とリアルタイムに合成して表示する手段とを有することを特徴とする携帯端末。
(もっと読む)
ステレオ画像処理を用いた車両検出装置
【課題】遠方まで被写体検出を実施する場合、極めて高い精度でステレオカメラの左カメラと右カメラの光軸の平行条件が維持されなければならない、という課題があった。また、たとえ光軸の平行条件が正確に維持されていたとしても、十分な精度で被写体を検出できる被写体までの距離には限界がある、という課題もあった。
【解決手段】2台のカメラによるステレオ画像処理手段と、カメラの1台分の複数フレームからフレーム差分処理を行うフレーム差分抽出手段と、基準となる背景画像と現在の画像との差分を抽出する背景差分抽出手段と、フレーム差分抽出手段の画像とステレオ画像処理手段との論理和とその結果と背景差分抽出手段の画像との論理積を車両特徴画像とする車両特徴画像作成手段とを備えたことを特徴とする。
(もっと読む)
オブジェクト制御プログラム及びオブジェクト制御装置
【課題】ユーザによって操作されるオブジェクトにユーザの意図した動作を行わせることが可能なオブジェクト制御プログラム及びそれを実行する装置を提供する。
【解決手段】ゲーム装置は、敵キャラクタの表示領域以外へのダブルタッチを検出すると、プレイヤキャラクタに前転動作を行わせる。一方、ゲーム装置は、敵キャラクタへのタッチ操作を検出すると、当該敵キャラクタの位置に禁止エリアを設ける。ゲーム装置は、禁止エリアへのタッチを検出すると、当該タッチ操作がダブルタッチであっても、プレイヤキャラクタに前転動作を禁止し、プレイヤキャラクタに敵キャラクタへの攻撃を行わせる。
(もっと読む)
キャラクタ画像編集サーバ及びキャラクタ画像編集システム
【課題】ゲーム機の稼働率を低下させることがなく、プレイヤが自ら編集したオリジナルのキャラクタの画像を利用してプレイすることができ、また、画像の生成作業が簡単なキャラクタ画像編集サーバ及びキャラクタ画像編集システムを提供する。
【解決手段】サーバ20は、情報通信端末70でのプレイヤの操作に応じて、自動車A表面の各パーツ51d〜51hの選択と、選択された各パーツ51d〜51hに貼付するステッカ33a〜33eの選択とを受け付ける選択受け付け部61と、選択受け付け部61の受け付けに応じて、自動車A登録画像記憶部42のステッカ無し三次元画像43aを、選択された各パーツ51d〜51hに選択されたステッカ33a〜33eを貼付したステッカ貼付済三次元画像43bに更新し、ゲーム機10でのプレイヤの操作に応じて、プレイに用いる自動車Aの三次元画像として、ステッカ貼付済三次元画像43bをゲーム機10に送信するサーバ貼付管理部62とを備える。
(もっと読む)
201 - 220 / 899
[ Back to top ]