
Fターム[5B057AA01]の内容
Fターム[5B057AA01]の下位に属するFターム
物流、搬送品 (951)
Fターム[5B057AA01]に分類される特許
21 - 40 / 447
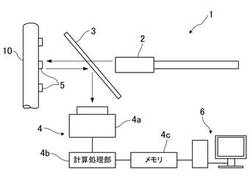
振動計測装置および振動計測方法
【課題】振動の測定および解析を容易に行うことができるようにする。
【解決手段】高速度カメラ4の撮像部4aは、ケーブル10の各実測点に設けられたマーカーシール5が正反射する光を撮像する。高速度カメラ4の計算処理部4bは、撮像部4aによる撮像と並行して、撮像部4aが撮像した画像毎に各実測点の座標を求める。高速度カメラ4のメモリ4cは、各実測点の座標に係るデータを記憶する。コンピュータ6は、メモリ4cに記憶された各実測点の座標に係るデータを用いてケーブル10の振動分析を行う。
(もっと読む)
三次元計測装置、三次元計測方法およびプログラム

【課題】 計測誤差の校正が可能な三次元計測装置を提供する。
【解決手段】
所定のパターンを投影する投影部と、パターンが投影された被写体を撮像する撮像部とを有する三次元計測装置は、撮像部によって撮像された画像において、計測空間内の同一平面上に予め設定された複数のパターン検出領域に投影されたパターンの撮像画素面上の位置情報を検出する検出部と、位置情報を用いて、計測時前に予め検出した投影部の投影画素面上のパターンと計測時における投影部の投影画素面上のパターンとの対応関係を算出する対応関係算出部と、を有する。
(もっと読む)
画像測定装置及び画像測定方法
【課題】操作者の手間が少なく、画像中の図形情報の測定を迅速且つ確実に行う。
【解決手段】CPU41は、撮像ユニット17で撮像された被測定対象物の画像を取り込み、取り込んだ画像に含まれる図形の輪郭線をハフ変換によって検出し、検出した輪郭線上にエッジ検出ツールを設定し、設定されたエッジ検出ツールにより、前記図形に関する図形情報の測定を行う。
(もっと読む)
3次元計測方法
【課題】ワークの3次元計測を行うために、3次元上の直線の式を算出する直線部を選択する場合に、多くの直線部を選択可能にする3次元計測方法を提供する。
【解決手段】ワークの3次元計測を行うにあたり、まず、ワークの設計データを取得する(S1)。次に、第1カメラ及び第2カメラよって、ワークを撮像し、第1画像及び第2画像を取得する(S2)。そして、取得した画像データから第1及び第2直線部を選択する(S4)。これら第1及び第2直線部を選択すると、ステレオ法を用いて第1直線部の3次元上の直線の式を算出する。次に、第1直線部の3次元上の直線の式と、ワークの設計データから求められる第1直線部に対する幾何学的な拘束条件とを用いて第2直線部の3次元上の直線の式を算出する。そして、これら第1及び第2直線部の3次元上の直線の式を用いてワークの3次元位置又は姿勢を計測する。
(もっと読む)
渦巻きばねの形状を算出するための画像処理装置、方法、及びプログラム
【課題】 渦巻きばねの撮影画像から芯線を正確に抽出する。
【解決手段】 画像処理装置は、渦巻きばねを撮影した撮影画像を入力する画像入力手段と、入力された撮影画像から渦巻きばねの輪郭線を抽出する輪郭線抽出手段と、抽出された輪郭線を極座標変換する座標変換手段と、極座標変換された輪郭線に対して、その輪郭線上を一方向に移動しながら一巡したときの「輪郭線の角座標値列(θ1,θ2,・・,θn)」を取得する角座標値列取得手段と、取得された「輪郭線の角座標値列」を用いて、内フック領域及び外フック領域を特定するフック領域特定手段を有している。
(もっと読む)
画像処理装置および画像表示システム
【課題】標本の高さ方向が異なる画像において、高さ方向に垂直な平面間の撮像領域のずれを補正して、高精度の全焦点画像および3次元画像を構築することができる画像処理装置および画像表示システムを提供すること。
【解決手段】固定された軸に沿って移動しながら撮像された一群の画像をもとに全焦点画像および/または3次元画像の構築処理を行う画像処理部33であって、一群の画像において、各画像における軸に垂直な平面内のずれの検出を行なう検出部331と、検出部331の検出結果に応じてずれの補正を行う補正部332と、固定された軸に沿って移動して撮像された画像および/または補正部332で補正された画像を含む一群の画像をもとに、全焦点画像および/または3次元画像を構築する画像構築部333と、を備えた。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
ひび割れ検出方法
【課題】撮影されたコンクリート表面に、実際のひび割れと類似した汚れや染み、撮影ムラ、型枠跡などが存在する場合でも、高い精度で実際のひび割れのみを検出することのできるひび割れ検出方法を提供すること。
【解決手段】ウェーブレット画像を作成するステップ、注目画素のウェーブレット係数が閾値よりも大きな場合は注目画素をひび割れと判定し、小さな場合は注目画素をひび割れでないと判定し、局所領域および注目画素を変化させながら注目画素のウェーブレット係数と閾値との比較をおこない、ひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない、さらに輪郭線追跡処理をおこなうことで二値化画像を作成するステップ、残りのノイズを除去してひび割れ画像を作成するステップ、細線化処理を実行して細線化画像を作成し、ひび割れ幅を推定するステップ、からなるひび割れ検出方法である。
(もっと読む)
物品認識装置、物品認識システム、プログラムおよび物品認識方法
【課題】 表面に光沢がある複数の物品をステレオカメラを用いて認識する。
【解決手段】 認識対象の複数の物品からなる物品群を撮像する第1および第2カメラを備えたステレオカメラを制御するカメラ制御部と、物品群を互いに異なる方向から照明する第1ないし第3照明装置を制御する照明制御部と、第1ないし第3照明装置のうちの何れか1つを順次点灯させて、ステレオカメラによってそれぞれ撮像された一対の2次元画像からなる第1ないし第3画像対を取得する撮像処理部と、第1ないし第3画像対に含まれる少なくとも1つの2次元画像から物品をそれぞれ含む領域を抽出する抽出処理部と、領域ごとに、第1ないし第3画像対のうち第1および第2カメラ間の受光量の差が所定値以下である画像対に基づいて物品の3次元画像を生成する3次元化処理部と、3次元画像に基づいて物品を認識して位置・姿勢情報を算出する認識処理部と、を有する。
(もっと読む)
ボトル缶のねじ部検査装置
【課題】ボトル缶のねじ部を正確かつ短時間で検査する。
【解決手段】ライナー付キャップを被嵌するために開口端を外方へ向かってカールさせたカール部1とカール部1の下方でキャップをねじ嵌合するねじ部2とからなる口金部3を有するボトル缶4を缶軸Xまわりに回転させながら、口金部3の一部を含むように設定された撮像エリアを撮像して口金部3におけるねじ部2の形状を検査する装置であって、ボトル缶4を保持して缶軸まわりに回転させる回転手段21と、撮像エリア内のボトル缶4のねじ部2に半径方向外方かつ缶軸方向下方から斜め上向きに照明光Aを照射するねじ部照明手段22と、撮像エリアにおける照明光Aの反射光A´を含む検査画像を連続的に取得する撮像手段24と、反射光A´の撮像結果に基づきねじ部2のねじ始まり部を検出し、ねじ始まり部を含むねじ部2の検査を行うねじ部検査手段25とを備える。
(もっと読む)
タイヤの欠陥検出方法
【課題】 タイヤ表面の薄広凸欠陥を高精度に検出することができるタイヤの欠陥検出方法を提供する。
【解決手段】 ステップS1を開始するまでに、予め連続的にスリット光像を含む2次元画像を取得しておく。ステップS1では、撮像された複数の2次元画像データから、スリット光像を抽出する。ステップS2では、抽出されたスリット光像から偏心によるぶれである偏心成分を除去する。ステップS3では、偏心成分を除去した光像に基づいて特徴量を算出し、ステップS4で、算出された特徴量に基づいて薄広凸欠陥を検出する。
(もっと読む)
塗膜劣化予測方法、塗膜劣化予測装置及びコンピュータプログラム
【課題】塗膜の将来の劣化状態を予測できる塗膜劣化予測方法、塗膜劣化予測装置及びコンピュータプログラムを提供すること。
【解決手段】塗膜劣化予測装置1の仮想劣化画像作成手段11は、所定のパラメータ及び時間変数に対応する複数の仮想劣化画像を作成する。対象画像作成手段12は、塗装面の撮影画像から対象画像を作成する。仮想プロファイル作成手段13は、仮想劣化画像の統計量として劣化部の個数f、面積率a、標準偏差sを算出し、f−a−s空間座標上に仮想プロファイルを示す。統計量算出手段14は、対象画像から統計量を算出し、対象値特定手段15は、対象画像に近い仮想プロファイルの統計量を特定し、特定した特定量に対応するパラメータ及び時間変数を特定する。劣化予測画像作成手段16は、特定されたパラメータを劣化進行モデルに入力し、時間変数に特定された値よりも大きい値を入力して、劣化予測画像を作成する。
(もっと読む)
画像処理装置及び建物画像診断装置
【課題】撮影対象における実質的な変質箇所(例えば、浮き、剥離等の箇所)を視覚的に明瞭に表示する画像処理装置を提供する。
【解決手段】温度差を設定する温度差設定手段107,108と、赤外線デジタルカメラで撮影された画像に含まれる領域であって、前記領域の内側にあるピクセルの温度が前記領域の外側でかつ前記領域の近傍にあるピクセルの温度に対して前記温度差を超えている領域を求める手段と、前記領域の内側にあるピクセルに前記領域の外側でかつ前記領域の近傍にあるピクセルの色情報とは異なる色情報を付与する色情報付与手段を有する。
(もっと読む)
目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイス
【課題】目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイスを提供する。
【解決手段】目視される物体202の表面210の画像500を獲得して、表示するステップであって、画像500の複数のピクセル231、232、233、234は、目視される物体202上の複数の表面ポイント221、222、223、224に対応する、ステップと、複数の表面ポイントに対応する複数のピクセルの各ピクセルに関して、ピクセルに対応する表面ポイントに関する3次元座標が利用可能性であるかどうかを判定するステップと、ピクセル231に対応する表面ポイント221に関する3次元座標が利用可能でない各ピクセル231に関する第1のオーバーレイ250を表示するステップとを備える方法。
(もっと読む)
画像処理方法、画像処理装置、建物画像診断方法、及び建物画像診断装置
【課題】撮影対象における実質的な変質箇所(例えば、浮き、剥離等の箇所)を視覚的に明瞭に表示する画像処理方法を提供する。
【解決手段】赤外線デジタルカメラで撮影された赤外線熱画像を利用する画像処理方法は、赤外線熱画像をディスプレイに表示する工程1と、ディスプレイに表示された赤外線熱画像の中で領域を指定する工程2と、工程2で指定された領域に対し、領域に含まれる対象ピクセルの温度データが示す温度と該対象ピクセル以外の別の基準ピクセルの温度データが示す基準温度との温度差に関連する色情報を対象ピクセルに付与する工程3と、色情報をもって対象ピクセルをディスプレイに表示する工程4と、工程1〜工程4を繰り返す。
(もっと読む)
画像処理装置、印刷装置、画像処理方法および画像処理プログラム
【課題】印刷に用いるドットデータを生成する技術を提供する。
【解決手段】画像処理装置であって、画像データに含まれる各画素の階調値を近傍の処理済画素からの拡散誤差で補正した補正階調値を判定値と比較し、比較によってドットの形成の有無を判定する際にドット形成の有無により生じる階調値との誤差を拡散する誤差拡散法を適用して、ドット形成の有無を表すドットデータを生成するドットデータ生成部と、各画素の補正階調値と判定値との比較に先立って、ディザマスクの閾値と画素の階調値とを比較し、画素の階調値が閾値を上回る場合に適用する判定値が、画素の階調値が閾値以下の場合に適用する判定値を上回らないように所定の幅で判定値を調整する判定値調整部とを備え、判定値調整部は画素が近接する画素との階調値の差が所定以上であるエッジ画素の場合に、ドット形成の判定に用いられる判定値の調整の幅をエッジ画素以外の画素と比較して小さくする。
(もっと読む)
ノズル外観検査装置、およびノズル外観検査方法
【課題】ノズル穴に生じる欠陥の種類を特定可能なノズル外観検査装置、およびノズル外観検査方法を提供すること。
【解決手段】ノズル外観検査装置100は、ノズル穴の開口部の画像を取得する画像入力手段60と、画像の二値化画像を生成する二値化手段61と、二値化画像からノズル穴の内輪郭および外輪郭を検出する輪郭検出手段62と、内輪郭の近似円である内輪郭近似円および外輪郭の近似円である外輪郭近似円を算出する近似円算出手段63と、内輪郭および外輪郭と内輪郭近似円および前記外輪郭近似円とを比較して、内輪郭および外輪郭の形状の特徴を示す特徴フラグを内輪郭および外輪郭上の各点に対して設定するフラグ設定手段64と、特徴フラグに基づいて欠陥の種類を示す欠陥フラグを設定し、欠陥の種類とその位置を検出する欠陥検出手段65と、を具備する。
(もっと読む)
画像出力装置
【課題】 台面上に載置されているものを上方から撮影する場合、同じ被写体であっても周囲の環境によっては写り具合が大きく変化してしまっていた。
【解決手段】 カメラ部が台面上で同台面上の被写体を撮影する。外光検出部は上記台面上での外光の状況を検出し、外光演算部はこの外光検出部による検出結果に基づいて上記カメラ部による上記台面上の撮影結果への影響を軽減する調整値を演算する。すると、外光除去処理部は上記カメラ部に上記台面上の被写体を撮影させて得られた画像に上記調整値を反映させて外光の影響を低減させる処理を施し、この外光除去処理部にて処理された画像を出力する。
(もっと読む)
欠陥検出方法及び欠陥検出装置
【課題】被検査物が複雑な形状である場合でも、精度よく欠陥を検出することができる欠陥検出方法及び欠陥検出装置を提供する。
【解決手段】欠陥検出方法は、撮像工程により被検査物を撮像し、エッジ検出工程により得られた画像データに基づいて、構造パターンの外周形状であるエッジを検出し、ライン検出工程により、エッジの最外周画素の集合であるラインを検出し、構造ライン取得工程によりエッジが境界となる複数の構造パターンに対してそれぞれに接するラインである構造ラインを取得し、エッジ幅取得工程により2つの異なる構造ライン間の距離をエッジ幅として取得し、平均エッジ幅算出工程により同じ構造ライン上の任意の2点を始点及び終点として設定し、始点から終点までの平均エッジ幅を取得する。そして、欠陥検出工程により、平均エッジ幅とエッジ幅とを比較し欠陥を検出する。
(もっと読む)
画像測定装置、オートフォーカス制御方法及びオートフォーカス制御プログラム
【課題】高精度且つ高速なコントラスト式のオートフォーカスを実現する。
【解決手段】画像測定装置は、ワークを撮像してその画像情報を転送するカメラと、カメラの合焦位置を制御してこの合焦位置をZ軸方向の位置情報として出力する位置制御部と、画像情報及び位置情報に基づいてワークの画像測定を行う画像測定機とを備える。位置制御部は、カメラによるワークの撮像期間における所定のタイミングで、カメラ及び位置制御部のいずれか一方から他方に出力されるトリガ信号に基づき位置情報を取得保持し、画像測定機は、カメラから転送された画像情報及び位置制御部から出力された位置情報に基づき画像情報のZ軸方向の位置情報を算出し、算出された位置情報を用いてオートフォーカス制御を行う。
(もっと読む)
21 - 40 / 447
[ Back to top ]