
Fターム[5B057AA05]の内容
Fターム[5B057AA05]に分類される特許
1 - 20 / 242
位置姿勢計測装置、その処理方法及びプログラム
画像処理装置、画像処理方法及び画像処理プログラム
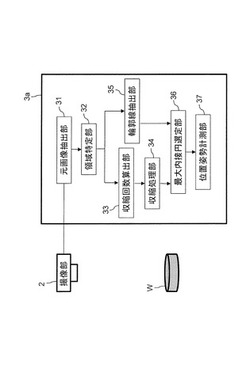
【課題】様々な位置姿勢や形状のワークに対応可能で、かつ、迅速に最大内接円を抽出可能な画像処理装置、画像処理方法及び画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像抽出部31と、元画像抽出部31により取得された元画像を2値化して、元画像からワークWの概略領域を特定する領域特定部32と、領域特定部32手段により特定された概略領域を所定回数収縮処理する収縮処理部34と、元画像抽出部31により取得された元画像からワークWの輪郭線を抽出する輪郭線抽出部35と、輪郭線抽出部35により抽出されたワークWの輪郭線と収縮処理部34により収縮処理された収縮領域とを合成し、収縮領域の領域内で輪郭線に内接する最大内接円の中心点を探索して、中心点を中心としたワークWの内接円を抽出する最大内接円選定部36と、を備えた。
(もっと読む)
姿勢推定装置、姿勢推定方法及びプログラム

【課題】高速かつ高精度に初期姿勢を推定すること。
【解決手段】姿勢推定装置は、第1対象物と第1対象物に近接する第2対象物とを撮影する撮影手段と、第1対象物の構成要素と、第2対象物の構成要素と、第1及び第2対象物の構成要素間で接触している確率と、が複数組、対応付けられた接触情報を予め記憶する記憶手段と、撮影された第1及び第2対象物を含む撮影画像と、記憶手段により記憶された接触情報と、に基づいて、確率の高い順で、第1対象物の構成要素と、第2対象物の構成要素との接触を検出する接触検出手段と、接触検出手段により検出された第1及び第2対象物の位置と、複数のリンクを相互に接続して第1対象物を表現した簡易モデルと、に基づいて、第1対象物の初期姿勢を算出し、算出した初期姿勢と、簡易モデルを第1対象物の形状により近似した詳細モデルと、に基づいて、最終的な第1対象物の初期姿勢を推定する推定手段と、を備える。
(もっと読む)
マシンビジョンシステムのパートプログラム編集環境内で編集初期化ブロックを利用するシステム及び方法
【課題】マシンビジョンシステムのパートプログラム編集環境内で編集初期化ブロックを利用するシステム及び方法を提供する。
【解決手段】パートプログラムの編集初期化ブロックを定義及び利用する方法が提供される。パートプログラムは、一部を測定するための複数のステップを備え、編集インタフェースに表示される。編集インタフェースに、編集初期化ブロックに含めるステップを選択する選択肢が提供される。パートプログラムが保存された後に、編集のためにパートプログラムが呼び出されると、追加のステップがパートプログラムに追加される前に編集初期化ブロックが実行され得る。編集初期化ブロックにない初期パートプログラムステップによって取得されたデータの少なくともいくつかは、編集初期化ブロックを実行して決定されたデータに関連する推定データに基づいてもよい(例えば、基づいて変更されてもよい)。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
データ構造、コンピュータプログラム、及びデータ取得装置
【課題】一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制する。
【解決手段】部品データ20は、シミュレーション装置10において、生産ラインのシミュレーションに用いられる。部品データ20は、部品の3次元画像を特定する部品形状データ21と、シミュレーションの実行時に表示される表示用テクスチャのテクスチャデータ22と、部品を識別するデータである部品識別データ23と、を備えている。テクスチャデータ22は、部品の3次元画像に対して第1倍率で描かれる画像のデータとして指定され、部品識別データ23は、部品の3次元画像に対して第1倍率よりも小さい第2倍率で描かれるQRコード画像のデータとして指定されている。
(もっと読む)
3次元位置・姿勢認識装置およびその方法、プログラム
【課題】本発明は、対象体本来の形状のうち部分的な形状の情報を欠いた計測点群を用いる場合であっても、対象体の3次元位置・姿勢を適切に認識可能な3次元位置・姿勢認識装置およびその方法、プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、計測点群と、対応するモデル点群とをマッチングさせ、モデル点群のうち、マッチング結果に基づいて特定される点を削除処理するモデル処理手段10と、計測点群と、モデル処理手段10において削除処理したモデル点群とをマッチングさせ、対象体3の3次元位置・姿勢を認識する認識手段11とを備えることを特徴とする。
(もっと読む)
データ構造、コンピュータプログラム、及びデータ取得装置
【課題】一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制する。
【解決手段】部品データ20は、シミュレーション装置10において、生産ラインのシミュレーションに用いられる。部品データ20は、部品の3次元画像を特定する部品形状データ21と、部品を識別するデータである部品識別データ23と、を備えている。部品識別データ23は、部品の3次元画像に対して描かれるQRコード画像のデータとして指定されている。
(もっと読む)
データ構造、コンピュータプログラム、及びデータ取得装置
【課題】一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制する。
【解決手段】部品データ20は、シミュレーション装置10において、生産ラインのシミュレーションに用いられる。部品データ20は、部品の3次元画像を特定する部品形状データ21と、部品を識別するデータである部品識別データ23と、を備えている。部品識別データ23は、部品の3次元画像に対して描かれるQRコード画像のデータとして指定されている。
(もっと読む)
物体姿勢推定方法、物体姿勢推定装置、物体推定姿勢精緻化方法、およびコンピューター可読媒体
【課題】物体を、ロボットの搭載カメラから見える通りのその姿勢にかかわらず認識することができるようにする。
【解決手段】物体を包含する画像を入力し、入力画像の2値マスクを作成、入力画像の2値マスクからシングレットのセットを抽出する。各シングレットは、入力画像内の物体の内側および外側輪郭内にある点を表す、抽出することと、シングレットのセットを連結し、デュプレックス行列として表されるメッシュにし、候補姿勢のセットを作るべく2つのデュプレックス行列を比較するこし、物体姿勢推定値によって、入力画像から物体の姿勢が推定され、次に、物体姿勢推定が記憶される。物体の推定姿勢は、カメラのパラメーターの入力、物体のモデルを物体の仮想画像に投影、初期姿勢パラメーターを新しい姿勢パラメーターに更新、エネルギー関数の最小化によって精緻化される。
(もっと読む)
画像処理装置、そのプログラムおよび画像処理方法
【課題】最近傍探索を高速化できる技術を提供する。
【解決手段】画像処理装置が、対象物の第1モデル点群データと第1測定点群データとを取得する取得部と、第2モデル点群データと第2測定点群データを取得するソート部と、基準点群データに係る第1点群での基準点に対する最近傍点を参照点群データに係る第2点群から探索する探索部と、基準点設定部とを備え、探索部が、基準点に対する基準座標軸方向の距離が基準距離よりも短い注目点を第2点群から選択する選択部と、基準距離よりも短い基準点と注目点との点間距離により基準距離を更新する更新部と、注目点として新たに選択可能な点が無くなるまで更新された基準距離が反映されつつ選択処理と更新処理とが逐次実行されるように、選択部と更新部とを制御する探索制御部と、選択処理と更新処理との逐次実行処理が終了されたときの基準距離の設定に係る注目点を最近傍点として決定する決定部とを備える。
(もっと読む)
情報処理装置及び情報処理方法
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
ロボット制御システム、ロボットシステム及びマーカー処理方法
【課題】 ロボットの操作対象物に設定された第1のマーカーに基づいて、操作対象物の位置情報を特定できるロボット制御システム等の提供。
【解決手段】 ロボット制御システム10は、撮像部20から得られる画像情報に基づいて画像処理を行う処理部110と、処理部110の処理結果に基づいてロボット30の制御を行う制御部120と、を含む。処理部110は、ロボット30の操作対象物に設定された第1のマーカーに設定された画像構成要素が、N回対称性を有する場合に、画像情報に基づいて、第1のマーカーの認識処理を行い、操作対象物のN個の候補位置情報を求め、操作対象物の認識処理の結果に基づいて、N個の候補位置情報の中から操作対象物の位置情報を特定する。制御部120は、操作対象物の位置情報に応じてロボット30を制御する。
(もっと読む)
対象物把持装置、対象物把持装置の制御方法、およびプログラム
【課題】対象物の姿勢を推定して把持を行う処理を高速化すると共に、把持動作の失敗確率を低減する。
【解決手段】対象物の姿勢を姿勢推定パラメータに基づいて推定する推定部と、推定部により推定された対象物の姿勢に基づいて対象物を把持する把持部と、把持部による把持の失敗を検知する検知部と、検知部により把持の失敗が検知された際の対象物の姿勢に基づいて姿勢推定パラメータを修正する修正部と、を備える。
(もっと読む)
ロボット制御システム、ロボットシステム及びマーカー処理方法
【課題】 操作対象物に設定された第1のマーカーの面積重心に基づき、マーカー向き情報を特定できるロボット制御システム等の提供。
【解決手段】 ロボット制御システム10は、撮像部20から得られる画像情報に基づいて画像処理を行う処理部110と、処理部110の処理結果に基づいてロボット30の制御を行う制御部120と、を含む。そして、処理部110は、画像情報に基づいて、ロボット30の操作対象物に設定された第1のマーカーの認識処理を行い、第1のマーカーの認識処理の結果に基づいて、第1のマーカーに設定された第1の画像構成要素の面積重心を求め、面積重心に基づいて、第1のマーカーが示す向きを表すマーカー向き情報を求める。さらに、制御部120は、マーカー向き情報に応じてロボット30を制御する。
(もっと読む)
外観投影装置を用いてロボットの動作を決定するロボットシステム
【課題】ワークの位相を容易に検出して、ワークの位相を補正する。
【解決手段】ロボットシステムは、周方向に延びる側面を有する被検出物(4)を把持する把持機構を備えたロボット(1)と、被検出物をその中心軸線の方向に挿入可能な開口部(7)、および被検出物を挿入する挿入方向において開口部から半径方向外側に向かって広がる鏡面加工された湾曲した内面(8)を含む外観投影装置(5)と、被検出物が開口部に挿入されたときに湾曲した内面に投影された被検出物の像を撮像する撮像装置(12)と、撮像装置により撮像された被検出物の像を画像処理して、被検出物の側面に備えられた位相特徴部(6)を検出するか、または被検出物の側面を検査する画像処理部(21)とを含む。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】ワークを搬送する経路上の状態把握を支援するための情報を出力する。
【解決手段】画像処理装置は、連続する撮像の前後で撮像範囲に重複領域を有する撮像部110に接続される画像処理装置であって、撮像部110によって得られる複数枚の撮像画像を受け付けるインターフェイスと、撮像画像に対する計測処理を行うことにより、当該撮像画像中の被写体の計測結果を取得する計測手段と、複数枚の撮像画像を、重複領域に対応する重なり範囲で撮像順に重なり合うように合成して合成画像を生成する合成手段と、合成画像と、当該合成画像に関連付けて重なり範囲を示す情報および計測結果を示す情報とを出力する出力手段と、を備える。
(もっと読む)
画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置
【課題】汎用的なロボットが配置されている生産ラインであっても、コンベアトラッキング等の処理を容易に実現できる画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置を提供する。
【解決手段】画像処理装置は、搬送装置上のワークの位置情報を管理する管理手段と、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する取得手段と、管理手段によって管理されているワークの位置情報を撮像部の撮像が行われたタイミングに対応する値に更新する更新手段と、更新手段による更新後の位置情報と計測処理によって取得されたワークの位置情報とを比較することで、撮像部の撮像範囲内に新たに搬送されたワークを特定する特定手段と、特定手段が特定したワークの位置情報を制御装置へ送信する送信手段とを含む。
(もっと読む)
1 - 20 / 242
[ Back to top ]