
Fターム[5B057AA14]の内容
Fターム[5B057AA14]に分類される特許
201 - 220 / 222
信号分離システム、信号分離方法及び信号分離プログラム

【課題】 信号源信号の分離処理を任意の条件下で精度良く行うことができる信号分離システムを提供する。
【解決手段】 信号分離部12のウェーブレット・パケット変換部13において、ウェーブレット・パケット変換を施し、時間領域の観測行列Xを時間周波数領域の観測行列X′に変換する。次に、混合行列推定部14において、変換された時間周波数領域の観測行列X′に基づいて、時間周波数領域の観測行列X′と時間周波数領域の信号源行列S′との間の関係を規定する混合行列Aを推定する。推定された混合 行列Aと変換された時間周波数領域の観測行列X′とに基づいて、時間周波数領域の信号源行列S′を推定する。
(もっと読む)
データ圧縮装置およびデータ伸張装置

【課題】 リモートセンシング画像データ等のデータ圧縮を行うシステムにおいて、予測符号化を用いたデータ圧縮装置を提供する。
【解決手段】 人工衛星の画像センサなどより入来する新規画像データは差分器へ、人工衛星の軌道・姿勢制御装置などより入来する新規画像の位置データは予測画像生成部へ与えられる。予測画像生成部は、参照データ蓄積部から予め蓄積された位置データ付き参照画像データを取り出し、新規画像の位置データと同じ地球上の位置の参照画像データを予測画像データとして出力し差分器に与える。差分器は、予測画像データと新規画像データの全画素間の差分を算出して差分画像データを出力し、符号化器に与える。符号化器は、差分画像データをランレングス符号化方式により可変長符号化することでデータを圧縮し、符号化された差分画像データを出力する。
(もっと読む)
3次元画像生成方法及びプログラム
【課題】欠落したデータから高精度な3次元画像を生成することが可能な3次元画像生成方法及びプログラムを提供する。
【解決手段】弾性波探査データを入力するステップS11と、弾性波探査データを3次元空間上に配列することによりビンニングを行うステップS12と、ビンニングを行ったデータに基づいて構造解釈を行うことにより構造図を作成するステップS13を有する。また、ビンニングを行ったデータに基づいて傾斜読みとりを行うステップS14と、構造図及び傾斜のデータに基づいてハイブリッド構造傾斜モデルを構築するステップS15を有する。また、ビンニングを行ったデータとハイブリッド構造傾斜モデルに基づいて移動平均アルゴリズムを使用して擬似データを生成することにより波動場内挿を行うステップS16を有する。また、波動場内挿により得られたデータを3次元画像化することによりマイグレーションを行うステップS17を有する。
(もっと読む)
地形の航空画像において道路を検出する方法
【課題】航空画像において道路を検出するための完全に自動化された方法を提供することが望ましい。
【解決手段】方法は、航空画像のピクセル毎に、強度および勾配のような低レベルの特徴を判定し、低レベルの特徴から、ピクセル毎の方向のような中間レベルの特徴を判定し、さらに、中間レベルの特徴から高レベルの特徴を判定することにより、地形の航空画像において道路を検出する。高レベルの各特徴は1つの確率を割り当てられ、ピクセル毎の高レベルの特徴の確率が正規化され、総計されて、そのピクセルが道路に関連付けられる単一の確率が生成される。
(もっと読む)
計測器自動読取装置
【課題】計測器を安価かつ精度よく計測することができる計測器自動読取装置を提供する。
【解決手段】流量計2は、表示部3と、計測値指示体4とを有している。表示部3は、その上部に最大目盛線3aが設けられ、その下部に最小目盛線3bが設けられ、これら最大目盛線3aと最小目盛線3bとの間に、等間隔をあけて複数の目盛線が設けられている。計測器自動読取装置1は、撮影手段10と、画面11と、集中管理室内のホストコンピュータと接続する通信回線12と、計測器自動読取装置1の内部のデータ処理ユニット20とを有している。準備工程において、ユーザーが流量計2の撮影を行い、目盛線3a,3bの座標をマウスを用いて決定する。計測工程において、データ処理ユニット20が、流量計2を撮影し、計測値指示体4の上端部の座標を検出する。これら目盛線3a,3bの座標及び計測値指示体4の上端部の座標から、データ処理ユニット20が計測値を演算する。
(もっと読む)
衛星データによる森林地域の植生分類方法
【課題】調査対象地域のバンドデータの季節変化を利用して、森林簿に沿って区分された調査対象樹種を抽出し、かつ、その分布領域を求めることにより広域的な植生図の作成をおこなうための衛星データによる森林地域の植生分類方法を提供する。
【解決手段】処理手順として、(1)調査対象樹種の解析適期を設定し、調査対象地域の一又は複数のバンドデータを取得する。(2)それぞれのバンドデータの輝度値に対し、樹種に応じた上下限値又は閾値を設定し、樹種数分の樹種対象抽出マップを作成する。
(3)調査対象地域の正規化植生指標を作成する。(4)上記(2)の樹種対象抽出マップについて、上記(3)の植生指標を用いてマスク処理を施すことにより、山林部又は樹種分布を特徴抽出する。(5)上記(2)又は上記(4)により作成した樹種対象抽出マップを段階的に組み合わせて比較又は合成することにより樹種ごとの純林分布を求める。
(もっと読む)
撮影画像の変化抽出装置及び方法
【課題】本発明は、オルソ画像だけでなく、異なる撮影位置、照明条件、角度、縮尺で撮影された複数の画像からの変化抽出を可能とする。
【解決手段】比較対照となる画像おのおのからフットプリント情報を抽出して、フットプリント情報を比較することで、変化を抽出する。
(もっと読む)
流入量予測装置及びプログラム並びにパラメータ変更方法
【課題】予測対象領域の土地利用状態が変化した場合に、この土地利用状態の変化を自動的に検知し、流入量の予測に用いられるパラメータを変更し、予測精度を確保する。
【解決手段】本発明の一態様において、流入量予測装置1は、予測対象領域の衛星画像データ11a〜11dを受け付ける手段2と、衛星画像データ11a〜11dに基づいて、土地の利用状態の種別を表す土地利用カテゴリに応じて予測対象領域を区分けした土地利用データ12を作成する分類手段3と、土地利用データ12に基づいて、土地利用カテゴリごとの面積を求める面積算出手段4と、面積に基づいて、予測対象領域における下水道への流入量の予測に用いられるパラメータを変更するパラメータ変更手段6とを具備する。
(もっと読む)
画像処理装置
【課題】誤対応点の検出及びマッチング処理に対する信頼性評価の精度の向上を図る。
【解決手段】一又は複数のカメラ9,10からなる撮像部2によって複数の画像Gb,Gcを撮像し、ステレオ処理部5において、これら画像Gb,Gcに対してマッチング処理を行い、視差補正部7の判定部11により、各画像Gb,Gcから一又は複数の特徴量を抽出し、これら一又は複数の特徴量に基づいてステレオ処理部5による複数の画像に対するマッチング処理の信頼性評価を行い、後続の補正部12で判定部11による評価情報に基づいてマッチング処理の際に生じるミスマッチングを補正する。
(もっと読む)
非均一分解能で合成イメージを用意する方法
二つの合成イメージの変化された特徴を識別するために、ビデオ・データ・ストリームのイメージから合成イメージを用意する方法。より高い明白な分解能を提供するために隣り合ったフレームは整列され、重複した領域は平均化され、ビデオ・データ・ストリームからのフレームは射影されたZDイメージへ変換される。合成イメージは、イメージの非重複部分とイメージの平均化された重複部分とから形成される。合成イメージはリアルタイムで保存され得る。時間が経った後同じ場所の第二合成イメージが用意されるにつれ、イメージの強度が等しくされた後で、第二イメージの部分は保存されたイメージの対応する部分と比較され得る。絶対的な差が閾値を超えるイメージ領域は、再度、強度が等しくさせられる。再び閾値を超える領域は、人間または物体認識を行う機械による、さらなる精査のために印を付けられ得る。 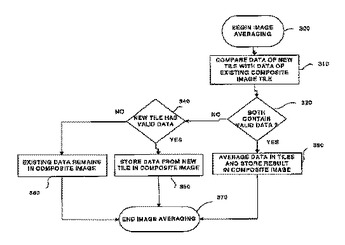 (もっと読む)
(もっと読む)
並列性能を強化した多適応型計算システム
計算機能の並列性および性能を強化するための多適応型処理システム(200)および技術であって、地震用途、探索アルゴリズム、情報機密保護、化学および生物学用途、フィルタリングなどにおける多次元パイプライン計算や、さらには流体流れおよび構造分析、生命情報科学などにおけるシストリック波面計算を含む無数の用途で用いられ得るシステムおよび技術が開示される。いくつかの用途では、ここに開示する多次元パイプライン(202)およびシストリック波面方法の両方が用いられることもある。  (もっと読む)
(もっと読む)
道路領域決定可能プログラム及び道路領域決定方法
【課題】 地理画像から道路の異なる部分道路領域を簡単に検出可能にする。
【解決手段】地表を撮影して得られる地理画像内のエッジを検出し、地理画像を複数のメッシュに分割し、各メッシュについてそのメッシュを通過するいずれかの道路が存在する場合に、その道路のそのメッシュ内に位置する部分道路に関して、当該部分道路に平行で、かつ、そこからの距離が制限値以下である、複数の直線状のエッジ部分を、当該部分道路の境界直線に関する部分道路境界直線候補として、道路ベクトルデータに基づいて検出し、それらの候補から、その部分道路が当該メッシュ内で占有する領域に関する複数の部分道路領域候補を検出し、それらの部分道路領域候補を評価してその一つを当該メッシュ内の部分道路領域として決定し、異なるメッシュに対して決定された複数の部分道路領域を接続して上記道路ベクトルに対する道路存在領域を決定する。
(もっと読む)
画像処理プログラム、遠隔操作プログラム、画像処理装置及び遠隔操作装置
【課題】 設けられている操作キーの数も少なく、また、表示画面の大きさも小さな携帯電話機を用いて、簡単かつ良好に移動カメラ装置を遠隔移動操作する。
【解決手段】 携帯電話機の数字キーと関連付けた移動マトリクスを、移動カメラ装置の撮像画像に付加して該携帯電話機の表示部に表示する。ユーザは、移動カメラ装置を移動させる際、この表示部を見て、移動カメラ装置を移動させたい場所に表示されている移動マトリクス上の数字を確認し、この数字と同じ数字の数字キーを操作する。コントロールステーションの制御部は、ユーザにより操作された数字キーと、現在、ユーザの携帯電話機の表示部に表示している移動マトリクスとに基づいて、移動カメラ装置の移動方向及び移動量を算出し、この算出結果に基づいて移動カメラ装置を移動制御する。
(もっと読む)
ステレオ写真画像の検索方法及び表示方法並びに管理システム
【課題】 ステレオ写真画像の管理、検索を容易に行え立体視及び三次元計測できるようにする。
【解決手段】 同一被写体を重複して撮影した複数の写真画像群からなるデジタルの画像データと標定図データを格納するデータ記憶手段5と、標定図の中に写真画像群のそれぞれの主点及びステレオ立体視を行うのに必要な写真画像のペアとしてステレオ写真画像対の主点同士を結ぶ基線を表示する標定図処理手段1と、ステレオペアの生成、登録、左右画像へのリンク情報の検索を行うステレオペア処理手段3と、ステレオ立体視を可能にするシステムとの通信を行い検索されたステレオペアの画像の情報を送信する立体表示連携処理手段4とを備え、基線又は主点をクリックまたは選択してステレオ写真画像対を検索して立体視及び三次元計測するためステレオ写真画像対を再配置して表示する。
(もっと読む)
画像処理装置及び該画像処理装置を用いた画像監視システム
【課題】 従来の画像監視システムは、監視画像に降雨や降雪等の不要な移動体が映っていてもそのまま監視員に表示しているため、画像が非常に見づらいものになり監視が困難な場合が発生するという課題があった。
【解決手段】 画像処理装置1において、不要移動体除去部3が画像蓄積部2に蓄積させ連続時間で映した連続画像の各画素毎に処理して画像に映りこむ不要な移動体を除去した画像を出力するため、監視員へ降雨雪等の不要な移動体を除去した見やすい監視画像を表示できる。
(もっと読む)
空撮画像の解析作業支援装置とそのための方法とプログラム。
【課題】 同一の地域を異なる時点に撮影した空撮画像群において相違している地点をより正確に特定する技術を提供し、空撮画像群を比較観察して撮影地域の変遷を把握する作業を支援する。
【解決手段】 同一の地域を異なる時点に撮影した空撮画像群を比較観察し、撮影地域の変遷を解析する作業を支援する装置であり、この解析支援装置は、第1の空撮画像を記憶している第1記憶手段と、第1の空撮画像と同一の地域を異なる時点に撮影した第2の空撮画像を記憶している第2記憶手段と、第1記憶手段が記憶している第1空撮画像の日影範囲を特定する第1特定手段と、第2記憶手段が記憶している第2空撮画像の日影範囲を特定する第2特定手段と、第1特定手段が特定した日影範囲と、第2特定手段が特定した日影範囲の一方のみに含まれる範囲を特定する第3特定手段と、第3特定手段が特定した範囲を表示する表示手段を備えている。
(もっと読む)
端成分データベース構築方法、端成分データベース構築装置及び端成分データベース構築プログラム
【課題】 複数の物質より成る物体の端成分を格納する端成分データベースを構築する。
【解決手段】 端成分抽出部101は、ハイパースペクトル画像151から入力端成分群153を生成する。照合部103は、入力端成分群153のうちスペクトルライブラリ105にも端成分データベース107にも登録されていない端成分群を新規端成分群155として出力する。入力端成分分布画像生成部111は、入力端成分毎に入力端成分分布画像を生成する。新規端成分分布画像選択部113は、入力端成分分布画像のうちの新規端成分に対応するものを新規端成分分布画像として選択する。ユーザは、新規端成分分布画像、ハイパースペクトル画像及び高分解能画像を基に、各新規端成分がどのような物体に対応するかを認識し、各新規端成分毎に、それを端成分データベース107に登録することについての可否を判断し、それを指示する。
(もっと読む)
レーダ画像処理装置
【課題】観測対象の範囲に対するその範囲中で時間的変化を生じる範囲の面積比が小さい場合であっても、観測対象の時間的変化の検出精度が高いレーダ画像処理装置を得ることを目的とする
【解決手段】異なる時刻にレーダ装置により取得された観測対象の2つのレーダ画像の観測対象の所定範囲に対応するそれぞれの部分画像間の相関値を算出し、所定範囲の中で異なる時刻の間に時間的変化を生ずる範囲の面積である変化面積を予測して、所定範囲の面積及び予測された変化面積に応じて相関値を補正し、この補正された相関値をもとに所定範囲における異なる時刻の間に生じた観測対象の時間的変化を検出するようにしたものである。
(もっと読む)
地盤高推定方法
【課題】従来の航空写真測量を用いる方法では、写真測量図化機を操作するオペレータに熟練と勘が必要とされ、さらに図化に長い時間を要した。熟練していなければ、精度が低く、再現性のある測定を実施出来ないと言う課題を有していた。一方レーザスキャナーデータによる方法は各社各様であり、この方法の詳細は公表されておらず、結果も整合性に欠けている、という問題があった。熟練を必要とせず、短時間で精度がよく、再現性のある地盤高測定法が強く望まれていた。
【解決手段】レーザスキャナーデータを利用し、樹冠からの反射点を多く含む上層面データと、地表面からの反射点及び樹冠と地表面の中間に存在する物体からの反射点データより、仮想下層面と仮想樹高分布を求め、仮想樹高分布にデータ処理を施し、補正樹高分布を得た後、上層面と補正樹高分布を用いて地盤高測定法を行うことによって前記課題を解決した。
(もっと読む)
撮影装置及び撮影方法
【課題】 空中や地上で撮影された対象物の画像を集成して、効率よく当該対象物に関する3Dモデルを作成できる撮影装置を提供すること。
【解決手段】 撮影部110と、撮影部110の撮影位置情報を取得する撮影位置測定部120と、位置既知点を有する対象物10の複数の画像データを記憶する画像データ記憶部130と、画像データ記憶部130に記憶された画像データを用いて、対象物10の三次元モデルを形成するモデル形成部210と、モデル形成部210で形成された対象物10の三次元モデルに関して、画像データ記憶部130に記憶された画像データと、撮影位置測定部120で得られる撮影位置情報に基づいて、撮影部110の撮影位置から視認される対象物10の三次元モデル画像を表示するモデル表示部160とを備えている。
(もっと読む)
201 - 220 / 222
[ Back to top ]