
Fターム[5B057AA14]の内容
Fターム[5B057AA14]に分類される特許
61 - 80 / 222
モザイク画像生成方法、装置及びプログラム

【課題】
高解像度航空写真から地上のモザイク画像を形成する際の処理負担を軽減し、ミスを低減する。
【解決手段】
高解像度航空写真データ24の解像度を落とした低解像度航空写真データ26を用意する。前処理では、低解像度航空写真データ26に対し、機能38、42、44により、オルソ画像の生成、接合線探索及びモザイク合成を実行し、低解像度モザイク画像を生成する。色調補正係数決定機能46は、低解像度モザイ画像から各モザイク片の色調補正係数を決定する。本処理では、正射変換機能38が、高解像度航空写真データ24の、接合線探索で探索された暫定接合線に従う合成候補域から高解像度オルソ画像を生成する。色調補正機能48が、色調補正係数に従い高解像度オルソ画像の色調を補正する。接合線探索機能42及びモザイク合成機能44が、高解像度オルソ画像から高解像度モザイク画像を生成する。
(もっと読む)
目標物検出システム

【課題】撮影画像上の農林資源を検出することが可能な目標物検出システムを提供する。
【解決手段】画素ブロック抽出手段31が探索対象画像から画素ブロックを抽出し、平均値算出手段32は該画素ブロックに対して、画素ブロック内の画素値の平均値を算出する。総和値算出手段33は、画素ブロックの各画素値より平均値を減算した差分値に画素に対応する前記正負符号ブロック内の正負符号値を乗じた値の総和値を各正負符号ブロックに対応して複数個算出する。画素評価値算出手段34は、複数個の総和値を用いて所定の演算を行い、複数個の画素評価値を算出する。目標物領域特定手段35は、画素評価値ごとに設定された画素判定基準値範囲と、画素評価値とを比較し、全ての画素評価値が対応する画素判定基準値範囲に含まれる場合に、画素ブロック内の所定の画素を、目標物領域として特定し、探索結果出力手段36が特定された特定画素を所定態様で出力する。
(もっと読む)
レーダー画像処理装置
【課題】レーダー画像の相関値を利用して変化検出を行なう場合、有意な地上変化以外の要因によって相関値が低下することを抑え、有意な地上変化による相関値低下との区別を可能にする。
【解決手段】相関値算出部12で算出した相関値を、観測幾何補正部16で観測条件の相違による影響を補正し、データベース部17において、上記補正を行なった相関値と地理情報等の環境情報とを関連付けたデータベースを作成する。変化検出を行う際には、観測領域相関値推定部23において上記変化検出処理範囲の環境情報を元にデータベース用いて相関値を推定し、これを用いて変化域判定部24において、変化検出処理範囲内における変化域を検出する。
(もっと読む)
画像判読支援装置
【課題】 目視による画像判読では、対象目標の機種特定が判読員の技量に依存し、その技量は判読員の熟練度による個人差が大きく、場合によっては対象目標の機種特定ができなくなるという問題がある。
【解決手段】 目標候補の種類に基づいて3次元モデルデータベースから3次元形状モデルデータを取得し、入力画像における撮影時の撮影条件および季節条件に基づいて、3次元形状モデルデータから入力画像を模擬する2次元画像データを生成する画像シミュレータと、画像シミュレータから目標候補の種類、姿勢毎に生成される複数枚の2次元画像データを、入力画像と比較照合して、入力画像中の目標を特定する照合部とを備えて、画像判読装置を構成する。
(もっと読む)
地形画像を用いた地形変化の解析方法及びそのプログラム
【課題】本願発明の課題は、多時期の地形情報を基に地形の変化を把握する方法であって、地形表面には特徴ある計測基準点を必要とせず、広範囲にしかも面的にむらなく地形変化を把握し得る方法を提供することにある。
【解決手段】本願発明の地形画像を用いた地形変化の解析方法は、多時期における地形の変化を解析する方法であり、計測点(平面座標及び高さ情報からなる空間情報を有する)の集合である点群データから計測時期ごとにDEMを作成し、このDEMを構成するメッシュを基にピクセルを作成し、DEM格子点の空間情報などに基づいて、ピクセルごとに地形量を演算し、これら地形量に基づいてピクセルごとに配色や明暗を付与して画像を作成し、この画像どうしを照合することで、異時期の地形の変化を判断する方法である。
(もっと読む)
クレータ検出装置
【課題】惑星表面のクレータの位置および大きさをクレータ特徴量として計測する際の計算負荷を軽減して処理時間を短縮したクレータ検出装置を得る。
【解決手段】第1の閾値よりも高い輝度値の画素のみを明部画像Gaとして入力画像Gから抽出する明部抽出部1と、第2の閾値以下の輝度値の画素のみを暗部画像Gbとして入力画像Gから抽出する暗部抽出部2と、明部画像Gaと暗部画像Gbの合成画像Gcを生成する画像合成部4と、画像合成部4に含まれる抽出領域の領域特徴量を計測して抽出領域がクレータか否かを判定するとともに、検出されたクレータのクレータ特徴量を出力するクレータ判定部6とを備えている。
(もっと読む)
画像解析装置、画像解析方法、及び画像解析プログラム
【課題】ハイパースペクトル画像における画素内に混在する物体を特定する。
【解決手段】本発明による画像解析装置10は、エンドメンバ抽出部221と、対象物特定部224とを具備する。エンドメンバ抽出部221は、ハイパースペクトル画像100から複数のエンドメンバ101を抽出する。対象物特定部224は、ハイパースペクトル画像の各画素に記録されたスペクトルデータから、複数のエンドメンバのいずれかを除去する。又、対象物特定部224は、除去後の画素のスペクトルデータと、データベース22内のスペクトルデータとを照合することで、画素に記録された物体を特定する。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】処理対象となる原画像の内容に依存することなく、白飛びや黒つぶれを制御してコントラストを補正する画像処理プログラムおよび画像処理装置を得る。
【解決手段】原画像データ323を対象として、局所領域内の黒つぶれ許容画素数321(または局所領域内の白飛び許容画素数322)に基づき、シャドー側(またはハイライト側)のクリップ値を算出する。これにより、黒つぶれ(または白飛び)補正を行って、画像の白飛びや黒つぶれを防止し、良好なコントラスト画像を得る。
(もっと読む)
同一領域上で取得されたSAR画像における統計的に均質な画素を識別するための方法
【課題】同一領域上で取得されたSAR画像の統計的に均質な画素を識別する方法を提供する
【解決手段】共通のグリッド上でSARセンサを用いてN個のレーダ画像を取得するとともに、それらN個の画像において決定されたサンプル画素に対してN個の振幅又は強度値のベクトルを計算し、サンプル画素に対して1つの推定窓(10)を規定し、その推定窓(10)内に含まれている全ての画素について、統計的検定を用いて各ベクトルをサンプル画素のベクトルと比較して、それらベクトルのうちでサンプル画素のベクトルの同じ確率分布関数により生成されるものを確認し、KS検定に合格した画素をサンプル画素と均質である画素(2、3)として、不合格の画素をサンプル画像と均質ではない画素(4)としてそれぞれ識別し、KS検定に合格した画素(2、3)であっても直接的又はサンプル画素と均質な他の画素を介してサンプル画素に連結していない画素を除去し、サンプル画素と均質かつ連結している画素のセットを統計的に均質な画素として識別する。
(もっと読む)
地表面画像データの生成方法および生成装置
【課題】衛星画像データ中に含まれる雲画像データを雲がなければ現れるはずであったと思われる地表面画像データに比較的高い精度で修正することができる地表面画像データの生成方法及び生成装置を提供する。
【解決手段】生成基準日における所定時刻の静止衛星画像データを取得し、次いで、各画素が地表面を反映したものか雲を反映したものかを判定して部分画像データと欠損領域を設定し、この後、前記生成基準日の所定時刻に対して太陽位置との関係で密接な時間的関連性を有するものと判定される他の撮像日時において画素値から地表面を反映したものと判定された画素により前記欠損領域が埋められるまで前記他の撮像日時を所定の優先順位に従って順次追加して処理を繰り返すことにより補間画像データを生成して地表面画像データの生成方法を構成する。
(もっと読む)
画像をカラー化する地理空間モデリングシステム及び関連する方法
地理空間モデリングシステムは、地理的エリアのカラー化3次元(3D)モデルを格納する地理空間モデルデータベースと、前記地理空間モデルデータベースと協働するプロセッサとを有する。前記プロセッサは、前記カラー化3Dモデルに基づき収集されたモノクロ画像に対応する推定されたモノクロ画像を生成し、前記推定されたモノクロ画像と前記収集されたモノクロ画像との間のモノクロ差分画像を生成し、前記モノクロ差分画像に基づき前記収集されたモノクロ画像に対応するカラー化画像を生成するよう構成される。 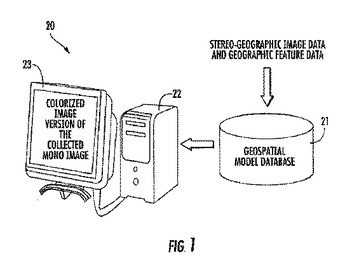 (もっと読む)
(もっと読む)
大気及び太陽照明モデリングを利用した画像の対の融合システム及び方法
イメージを処理する方法は、第1のスペクトル帯域に関連する第1の画像と、複数の第2のスペクトル帯域に関連する複数の第2の画像とを規定するデータを受信すること(204)を含む。この方法はまた、第2の画像における画素について第1の反射率関数を取得し(210)、複数の第1の反射率関数に基づいて第1の画像の画素における画素について第2の反射率関数を生成し(212)、第2の反射率関数と、第1の画像のイメージデータと、少なくとも1つの小平面方向の制約とに基づいて、第1の画像における画素について第3の反射率関数を取得すること(216)を含む。この方法は、第2及び第3の反射率関数の間の差に基づいて、第2の画像における画素について第4の反射率関数を生成するため、第1の反射率関数を変更し(218)、第2のスペクトル帯域に関連すると共に第1の空間分解能を有する第3の画像を規定するイメージデータを計算すること(224)を更に含む。  (もっと読む)
(もっと読む)
航空障害物抽出装置、航空障害物抽出方法、及びプログラム
【課題】少ない作業工数で詳細に航空障害物を抽出することができる航空障害物抽出装置、航空障害物抽出方法、及びプログラムを提供する。
【解決手段】航空障害物抽出装置100は、制限表面から算出した二次表面と、DTMデータ又はDSMデータと、から調査範囲を限定し、この調査範囲内でのみ、現地測量などによる別途建造物の高さの調査や、その高さ等を示すDSMデータの高さ情報入力部20への入力が行われさえすれば、DSMデータが示す高さと制限表面とから航空障害物を判定することができる。これにより、航空障害物抽出装置100は、明らかに制限表面を侵害しない建造物の高さの現地測量などによる調査、及びその高さを示すDSMデータの高さ情報入力部20への入力を省略することが可能となるため、作業工数を削減することができるとともに、少ない作業工数でも航空障害物を詳細に抽出することができる。
(もっと読む)
画像表示処理装置及び画像表示処理方法
【課題】高空から撮影した3バンド以上を有する画像に対して、画像に写っている複数の目的物をそれぞれ異なった表示方法で表示する。
【解決手段】画像300は、5つのそれぞれ異なる波長領域帯を撮影した多バンド301〜305に対応し重ねられる画像から構成する。また、画像300は位置情報を有している。その上に領域データ310がフィルタとして重ねる。領域データ310も位置情報を有しており、その位置情報を元に画像の位置情報を介して画像300と関連付けし、図示するように位置合わせして重ねる。領域データ310は、その中に地上の被覆分類を示すデータ、例えばデータ311から314までを有する。ここでは、311が湖領域、312が森領域、313が都市領域、314が海領域である。これらの領域データは、画像データの一部として直接画面上に表示されるものではないが、領域データの内容を変更したり、確認したりする場合は表示する。
(もっと読む)
回転推定装置、回転推定方法およびプログラム
【課題】3次元画像において画像が低品質で基準となる面に目印となるものが無くても撮像系の回転やその時間変動の推定を可能とする。
【解決手段】回転推定装置は、撮像装置が複数のタイミングで撮像した複数の3次元の画像を受け付け、前記複数の画像に共通に存在する面領域を検出し、前記画像ごとに、当該画像に基づいて、当該画像内の前記面領域に対する前記撮像装置の相対的な姿勢を求める姿勢判定手段と、前記画像ごとに求められた前記撮像装置の相対的な姿勢に基づいて、前記撮像装置の回転状態を求める回転状態推定手段と、を含む。
(もっと読む)
2D電子光学的画像データに対する3D点群データの登録
二次元画像データセット及び点群データを有する三次元画像の登録のための方法及びシステムについて開示している。本発明の方法は、シーンにおいて地表面を有する点群データの一部を除去するように、三次元画像データを有する点群データの三次元ボリュームをクロッピングするステップと、三次元ボリュームをm個のサブボリュームに分割するステップとにより始まる。次に、その方法は、二次元画像データをエッジ強調するステップを有する。次に、サブボリュームを各々適格化するために、フィルタ処理された濃淡画像を生成し、エッジ強調された前記二次元画像データ及び前記フィルタ処理された濃淡画像に基づいて、二次元相関表面を演算し、前記二次元相関表面のピークを求め、前記二次元画像における前記ピークの対応する位置を決定し、対応点セットを規定し、そして点セットリストにおける前記対応点セットを記憶するステップを有する。最終的には、点セットリストに含まれる複数の相関点セット間の誤差を最小化する変換が決定される。  (もっと読む)
(もっと読む)
画像変化抽出装置
【課題】地表面に生じた物理的な変化をより高精度に抽出し、変化の空間的連続性を正しく表示する画像変化抽出装置を提供する。
【解決手段】コヒーレンスマップを対象に、ノイズ除去を行うノイズ除去部2と、ノイズ除去後の画像から特徴量抽出を行う特徴量抽出部6と、コヒーレンスマップを構成する画素のコヒーレンスの時間的、空間的平均値を算出するコヒーレンス平均算出部3と、コヒーレンスマップの時系列変化情報を用いて、変化抽出を行う変化抽出部4と、変化の発生時刻のずれを検出し、時刻調整を行う変化時刻調整部5と、変化選別を行い変化選別後の変化選別画像データを全体の出力とする変化選別部7とを備える。
(もっと読む)
車両台数密度観測装置及び車両台数密度観測装置用のプログラム
【課題】解像度の低い衛星画像等から、車両1台1台を車両線分として正確に自動認識し、局所領域毎の車両台数密度を正確に観測し得るような車両台数密度観測装置を実現し提供する。
【解決手段】車両台数密度観測装置1は、画像入力部11と、キーボード4と、制御部10と、処理部19と、道路領域抽出部12と、局所領域分割部13と、道路方向算出部14と、入力画像全体から線分群を抽出する線分群抽出部15と、求められた線分群から車両の前面又は後面に相当する車両線分群のみを抽出する車両線分抽出部16と、分割された局所領域ごとに車両線分群の密度を求める車両台数密度算出部17と、求められた車両台数密度を対応する地図情報上に合成する画像処理を行う車両台数密度表示処理部18を有する処理装置2と、画像処理結果を表示する表示装置5とを有する。
(もっと読む)
ステレオマッチング処理システム、ステレオマッチング処理方法、及びプログラム
【課題】同一の位置を複数の画像間において正確に対応付ける。
【解決手段】ステレオマッチング処理システムは、オペレータによる操作により、左画像上の補助線A2と右画像上の補助線A1とが対応付けて入力されるとともに、左画像上の補助線B2と右画像上の補助線B1とが対応付けて入力された場合、左画像上における走査線及び補助線A2の交点の座標a2と右画像上における走査線及び補助線A1の交点の座標a1とを検索平面上で対応付ける。また、左画像上における走査線及び補助線B2の交点の座標b2と右画像上における走査線及び補助線B1の交点の座標b1とを検索平面上で対応付ける。これにより、ステレオマッチング処理システム1は、検索平面上における誤った対応付けを改善して、同一の位置を左画像と右画像との間で正確に対応付けることができる。
(もっと読む)
建築物変化検出装置、建築物変化検出方法、及びプログラム
【課題】地図上の建築物の変化をより高精度に検出する。
【解決手段】建築物変化検出装置1は、旧年度時点と新年度時点との間における地図上の検出対象領域の建築物の変化を検出する。旧年度画像データ取得部10は、旧年度時点において検出対象領域を撮影した旧年度画像データを取得する。新年度画像データ取得部20は、新年度時点において検出対象領域を撮影した新年度画像データを取得する。地物変化検出部30は、旧年度画像データと新年度画像データとを比較して、検出対象領域における地物の変化を検出する。建築物非存在領域特定部40は、検出対象領域の中において、建築物が存在しない建築物非存在領域を特定する。建築物変化検出部50は、検出対象領域から建築物非存在領域を除外した領域において地物変化検出部30により変化が検出された地物を、検出対象領域において変化した建築物とすることにより、検出対象領域の建築物の変化を検出する。
(もっと読む)
61 - 80 / 222
[ Back to top ]