
Fターム[5B057AA14]の内容
Fターム[5B057AA14]に分類される特許
81 - 100 / 222
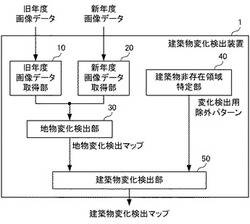
建築物変化検出装置、建築物変化検出方法、及びプログラム
【課題】地図上の建築物の変化をより高精度に検出する。
【解決手段】建築物変化検出装置1は、旧年度時点と新年度時点との間における地図上の検出対象領域の建築物の変化を検出する。旧年度画像データ取得部10は、旧年度時点において検出対象領域を撮影した旧年度画像データを取得する。新年度画像データ取得部20は、新年度時点において検出対象領域を撮影した新年度画像データを取得する。地物変化検出部30は、旧年度画像データと新年度画像データとを比較して、検出対象領域における地物の変化を検出する。建築物非存在領域特定部40は、検出対象領域の中において、建築物が存在しない建築物非存在領域を特定する。建築物変化検出部50は、検出対象領域から建築物非存在領域を除外した領域において地物変化検出部30により変化が検出された地物を、検出対象領域において変化した建築物とすることにより、検出対象領域の建築物の変化を検出する。
(もっと読む)
天候変化検出装置、天候変化検出方法及び天候変化検出プログラム

【課題】天候観測カメラで撮影された映像を用いて簡易かつ正確に天候の変化を検出する天候変化検出装置、天候変化検出方法及び天候変化検出プログラムを提供することを課題とする。
【解決手段】色彩値と観測対象の動きと観測対象のテクスチャといった複数の検出結果を統合して天候変化を検出する。
(もっと読む)
車両走行路の特徴情報の生成方法および生成装置、ならびに生成処理用のプログラム
【課題】車両走行路を表す3次元情報を処理することによって、車両走行路の具体的な特徴を精度良く表した情報を生成する。
【解決手段】鉄道用軌道を含む所定広さのエリアを対象として生成されたオルソ画像をベクトル化エンジン2において処理することにより、軌道の位置および方向ならびに勾配の変化を表す3次元ベクトルを連ねた3次元ベクトル鎖11を生成する。軌道プロファイル生成エンジン3は、この3次元ベクトル鎖11の提供を受けて、各ベクトルにつき、そのベクトルが左右いずれのカーブに対応するかを特定し、さらにカーブ半径を求める処理や、カーブ半径から直線/曲線の属性を特定する処理などを実行する。さらに特定されたカーブの向きや属性に基づき、3次元ベクトル鎖11を複数の区間に分割し、各区間における軌道の特徴を表す情報を集合させた軌道プロファイル13を生成する。
(もっと読む)
植生生育状況解析方法、プログラムおよび植生生育状況解析装置
【課題】人工衛星等の飛翔体から得られるレーダ画像を利用して、多時期の植生の生育状況を正確に解析できるようにする。
【解決手段】飛翔体に搭載されたレーダ装置で複数の時期に撮影された、同一対象エリアの地表面のレーダ画像を取得し、取得された複数のレーダ画像を地図データベースに保存する。次に、所定時期に撮影されたレーダ画像を基準画像として、他の時期に撮影されたレーダ画像の位置合わせを行った後、前記レーダ画像の特定領域の後方散乱係数を抽出する。さらに、前記地図データベースに保存された複数のレーダ画像のうち、前記基準画像の特定領域の後方散乱係数を基に、他のレーダ画像の後方散乱係数を較正する。そして、レーダ画像の後方散乱係数と植生の生育値の相関関係に基づいて、前記較正されたレーダ画像の後方散乱係数から当該レーダ画像に写っている植生の生育値を算出する。
(もっと読む)
位置特定装置及び異動建物検出装置
【課題】撮影手段の正確な現在位置が判明しない場合でも、目標物の位置を正確に特定することができるようにする。
【解決手段】カメラ2の概略の位置を基準にして、撮影範囲に略対応する地表面上の領域を特定して、その領域の地図データから各地点の標高を示す標高点データを取得する標高点データ取得部13と、透視投影変換用のパラメータを用いて、その標高点データの透視投影変換を行う透視投影変換部14とを設け、地上高パタン生成部11により生成された地上高パタンと透視投影変換された標高点データとの相関が最大になる透視投影変換用のパラメータを計算して、そのパラメータを透視投影変換部14に設定する。
(もっと読む)
判読支援装置
【課題】 目視による判読では、広い範囲の画像を判読員が隅から隅まで見て目標物を見つけるため、多くの人手が必要でありかつ作業時間も長時間になるという問題がある。
【解決手段】 地表を撮影した画像の四隅の緯度経度を付与し処理画像を出力する画像処理部と、地図データをブロック毎に緯度経度及び地形情報と対応付けて記憶する地図データベースと、外部から目標物の種類が指定されると目標物の存在する可能性のある地形情報と目標物の特徴情報を出力する特徴データベースと、目標物の特徴情報に対応するテンプレート画像を記憶するテンプレート画像データベースと、処理画像と地形情報より地図データを読み取り目標物の検索領域を絞り込んだ絞込画像を出力する領域選定部と、特徴情報よりテンプレート画像を読み取り絞込画像とテンプレート画像に基づき目標物を検索し位置を出力する画像検索部とを備える判読支援装置である。
(もっと読む)
樹種分類方法及び樹種分類システム、森林現況情報の作成方法及び森林現況情報の作成システム、間伐対象区域の選定方法及び間伐対象区域の選定システム
【課題】森林の樹種を適切に判別して森林現況情報を作成し、作成された森林現況情報を用いて間伐対象区域を適切に選定可能とする。
【解決手段】森林現況情報に関する森林現況情報画像データに基づいて、森林を小班区画に分別するための小班区画画像データを作成して、前記小班区画画像データと前記森林現況情報画像データとに基づいて森林現況小班区画画像データを作成する森林現況小班区画画像データ作成部310と、各小班区画の特徴を現す小班区画属性情報を抽出し、前記各小班区画属性情報に関する小班区画属性情報画像データを作成する小班区画属性情報画像データ作成部320と、小班区画属性情報画像データと当該森林の地利条件とに基づいて間伐対象区域を選定し、選定された間伐対象区域を表す間伐対象区域画像データを作成する間伐対象区域画像データ作成部330とを有する。
(もっと読む)
目標物検出システム
【課題】 特定の物体を探索対象とした場合に、目標物探索の処理負荷を軽減して、高速に探索を行うことが可能な目標物検出システムを提供する。
【解決手段】 画素ブロック判定手段31が、照合パターンに従って所定サイズの画素ブロックを探索対象画像から順次抽出し、抽出した画素ブロックに対して所定の判定条件を満たすかどうかの判定を行い、条件を満たす場合に各画素ブロックに対応する探索基点画素を設定する。次に、目標物特定手段32が、探索基点画素を含む所定の領域を基点画素影響領域として設定し、探索対象画像上の各画素について、基点画素影響領域に含まれた回数を計数し、所定サイズの計数集計範囲を設定し、計数集計範囲を移動させたときに、計数集計範囲に含まれる画素の回数の総計が最大となる場合に、計数集計範囲内の所定の画素を目標物を示す特定画素として設定する。
(もっと読む)
画像補正装置およびその補正方法
【課題】特許文献1および2に開示の発明とは全く異なる構成により、パララックスにより生じた画像のずれを補正することが可能な画像補正装置の提供。
【解決手段】画像補正装置1は、複数個のリニアアレイセンサ11および12と、リニアアレイセンサ11および12が搭載される飛翔体の飛行データおよび飛行する地形データが格納されるデータ格納部13と、データ格納部13に格納される飛行データおよび地形データに基づき、各リニアアレイセンサから地表までの距離を計算し、得られた距離に基づき、基準となるリニアアレイセンサで撮像された画像に対する他のリニアアレイセンサで撮像された画像の画像シフト量を計算して画像シフトを行う画像シフト部14と、画像シフト部14にて画像シフト後の画像を合成する画像合成部15とを含む。
(もっと読む)
炭酸ガス排出量取得システム
【課題】グローバルな地図情報、衛星画像、付加情報から、地域、国単位で消費炭酸ガスの排出量と消費量を求める。
【解決手段】指定された地域の衛星画像を含む動的情報と地図データを含む静的情報を緯度と経度により座標軸をあわせ、組み合わせ解析し、動的情報の種別を判別し、緑地面積、車両台数、住宅や工場の電力消費量のうち少なくても1つを含む炭酸ガス排出要因データを算出する。算出した炭酸ガス排出要因データと統計データを組み合わせて指定された地域の炭酸ガスの排出量を算出する。
(もっと読む)
干渉合成開口レーダシステム、処理方法、飛行体制御装置、飛行体制御方法及びプログラム
【課題】高度が異なる複数の合成開口レーダ間で観測対象物を一致させ、2つの衛星の観測データ間の相関を適切に保つ。
【解決手段】合成開口レーダ衛星200の軌道と合成開口レーダ衛星100が観測した観測対象物の位置とに基づいて合成開口レーダ衛星200のオフナディア角θ2を算出し、合成開口レーダ衛星200のオフナディア角が算出したオフナディア角θ2になるように合成開口レーダ衛星200のアンテナの指向性を設定する。次に、合成開口レーダ衛星100のオフナディア角θ1と合成開口レーダ衛星100が放射する電波の周波数帯域f1±B1/2と算出した合成開口レーダ衛星200のオフナディア角θ2とに基づいて合成開口レーダ衛星200が放射する電波の周波数帯域f2±B2/2を算出し、合成開口レーダ衛星200が放射する電波の周波数帯域を算出した周波数帯域f2±B2/2に設定する。
(もっと読む)
撮影計画作成システム
【課題】予め設定された固定経路を通りながら撮影を行う機器(例えば経路が定められるような無人機や人工衛星等)の撮影計画を作成する際、優先度の高い撮影対象の近辺に多数の撮影対象が存在する場合、撮影を行うのに必要な時間の競合が発生することがある。
【解決手段】撮影計画を作成する際、各撮影対象を撮影するのに必要な時間が競合し撮影計画に割付かなかった撮影対象が存在した場合、作成した撮影計画と撮影可能角度範囲算出部40が算出した撮影可能角度範囲を撮影計画調整部70に入力する。撮影計画調整部70は、同時に撮影が行える撮影対象が見つかった場合、割付済みの撮影対象の撮影時間および撮影角度を変更し、未割付けとなった撮影も同時に取得できるような撮影計画を作成する。
(もっと読む)
レーダ画像処理装置
【課題】スクイント角を含む記録データに対しても、画像再生過程においてレンジ方向のリサンプリングを実行し、高精度なレーダ画像のレジストレーションを実現することができるレーダ画像処理装置を提供する。
【解決手段】観測対象に対して異なる複数の方向から送信され、観測対象で反射されたレーダビームを受信して得られた記録データに基づいて、レーダ画像を再生するレーダ画像処理装置であって、画像再生過程において、記録データに対して、レンジ方向のサンプリング間隔の伸縮変更を実行するとともに、観測時のスクイント角に対応するドップラー中心周波数のオフセット補正を実行する画像再生部2を備えたものである。
(もっと読む)
市街景観画像情報較正システム
【課題】 実画像を用いた都市景観3次元動画を提供するシステムに対して実画像取得にともなう位置情報、撮影方向等のメタデータの精度向上手段を提供する。
【解決手段】 都市市街を地上から高密度に多方向から撮影した画像をデータベース化し、任意の都市の位置に対して任意の視点経路と視線方向に対応した画像をデータベースから検索して、検索した画像を実際の視点との視差に対応してモーフィング処理により連続した滑らかな3次元動画に生成することを特徴とする都市景観3次元動画システムにおいて、生成する3次元動画の品質を向上させるの区的で、実画像取得にともなう位置情報、撮影方向等のメタデータの精度向上を行う手段を提供する。
(もっと読む)
位置誤差補正装置及び位置誤差補正プログラム
【課題】衛星画像に関する光学マルチセンサデータのシステム補正処理から幾何モデルパラメータ調整までの一連の処理を再帰的に自動で行う装置を提供する。
【解決手段】画像処理部10は、光学マルチセンサデータ、人工衛星の軌道・姿勢データ、幾何モデルパラメータに基づき、複数帯域の衛星画像データを作成する。バンド間位置誤差算出部20は、所定の帯域の衛星画像データを基準画像データとし、基準画像データ以外の各帯域の衛星画像データを参照画像データとし、基準画像データと各参照画像データとの間の位置誤差をバンド間位置誤差として参照画像データごとに算出する。幾何モデルパラメータ算出部40は、各バンド間位置誤差に基づき、新たな幾何モデルパラメータを算出する。画像処理部10は、前記光学マルチセンサデータ、前記軌道・姿勢衛星データ、新たに算出された幾何モデルパラメータとから新たに複数帯域の衛星画像データを作成する。
(もっと読む)
目標物検出システム
【課題】 金属材質の目標物を対象とする場合において、探索すべき対象を漏らさず、かつ探索の処理負荷を軽減するため、探索範囲を的確に絞り込むことが可能な目標物検出システムを提供する。
【解決手段】 探索対象画像中から目標物を探索するにあたり、事前に目標物が存在する可能性が高い部分のみを探索対象領域として設定する。その際、4×4の画素ブロックに適用するための画素評価算出式、画素判定基準値、画素評価算出式により算出される画素評価値と画素判定基準値の関係による設定条件を定めるが、画素判定基準値については、利用者による探索対象の指定に従い(a)、指定された箇所が探索対象として設定されるような値を設定する。さらに、利用者による探索非対象の指定に従い(b)、指定された箇所が探索非対象として設定されるように既に算出された画素判定基準値を補正する。
(もっと読む)
目標物検出システム
【課題】 金属材質の目標物を対象とする場合において、少ない演算処理負荷により、的確に目標物の検出を行うことが可能な目標物検出システムを提供する。
【解決手段】 探索対象画像中において、金属材質を対象とする候補画素を選定した後、候補画素の1つを検出し(S501)、検出された候補画素より右方向に隣接した候補画素を順次探索する(S502)。右方向に候補画素がN個連続しない場合には(S503)、検出画素より下方向に隣接した候補画素を順次探索する(S504)。右方向、下方向のいずれかで候補画素がN個連続した場合には(S505)、連続するN個の候補画素の平均値、最大最小値を算出し(S506)、平均値が所定値以上で、最大値と最小値の差が所定値以下である場合には(S507)、連続するN個の候補画素を全て目標物非存在領域に修正し、修正した画素の隣接画素も順次目標物非存在領域に修正する(S508)。
(もっと読む)
地物形状変化検出プログラム、及び、地物形状変化検出システム
【課題】 高度上空から地表を撮影した観測画像に基づいて、家屋の変化を検出する際に、変化が無いと判定する家屋の判定精度を上げる。
【解決手段】画像上の各家屋の家枠51a〜51c・53a〜53cをトレースし家枠ベクタ61a〜61c・63a〜63cを抽出し、新旧画像の各家枠を対応付け、対応する家枠のベクタ比較を行い、変化の無い家屋63a・63cと、変化の可能性がある家屋63b−1と、を検出する。この処理により、変化の無い家屋を自動的かつ高精度で検出し、変化可能性のある家屋のみを抽出することができるため、実際に変化したか否かの識別における目視検査の作業量を大幅に削減することができる。
(もっと読む)
画像処理装置及び画像処理方法及び画像処理プログラム
【課題】異なる時刻に撮影された2つの画像間の位置ずれ量を効率よく自動的に求めることを目的とする。
【解決手段】マッチング処理部202は、異なる時刻に撮影された2つの画像(例えば、地震が発生する直前及び直後の画像である発災前画像及び発災後画像)をメモリ252から読み取り、一方の画像(例えば、発災後画像)にて所定数の画素からなる第1の領域を1画素単位で移動し、第1の領域を移動する度に、第1の領域と、他方の画像(例えば、発災前画像)にて第1の領域と同じ位置にある第2の領域との間の相関係数をプロセッサ251により算出する。位置ずれ量算出処理部203は、マッチング処理部202が算出した相関係数に基づいて、上記2つの画像間の位置ずれ量を1画素未満の単位でプロセッサ251により推定する。
(もっと読む)
画像処理装置
【課題】地表面に生じた物理的な変化をより高精度に抽出する画像処理装置を提供する。
【解決手段】取得時間の異なる同一領域を観測した複数枚のレーダ画像を格納するデータ格納手段(1)と、複数枚のレーダ画像からそれぞれ2枚のレーダ画像を選択して複素相関を算出し複素相関の分布を示すコヒーレンスマップを算出するコヒーレント算出処理手段(2)と、得られたコヒーレンスマップから各コヒーレンスマップ上の注目画素に関する閾値を算出する閾値算出処理手段(110a)と、算出されたコヒーレンスマップと閾値をもとにコヒーレンスの変化領域を抽出する閾値処理手段(200a)と、を備えた。
(もっと読む)
81 - 100 / 222
[ Back to top ]