
Fターム[5B057AA14]の内容
Fターム[5B057AA14]に分類される特許
1 - 20 / 222
辞書を用いてパンクロマチック画像及びマルチスペクトル画像をパンシャープン化する方法
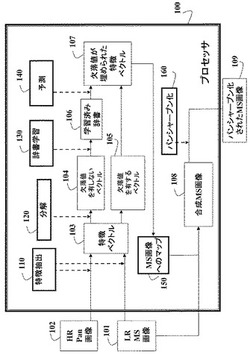
【課題】辞書を用いてパンクロマチック画像及びマルチスペクトル画像をパンシャープン化する方法を提供する。
【解決手段】単一のパンクロマチック(Pan)画像102と、単一のマルチスペクトル(MS)画像101とが、Pan画像及びMS画像から特徴を抽出することによってパンシャープン化160される。特徴は、欠落値を有しない特徴と、欠落値を有する特徴とに分解される。欠落値を有しない特徴から辞書が学習される。辞書を用いて、欠落値を有する特徴の値が学習される。MS画像は、予測値を含むPan画像と合成されて、合成画像にされ、次に、合成画像がパンシャープン化される。
(もっと読む)
空間イメージ次元縮小システム及び方法

【課題】複数の空間ピクセル(PX)を有するハイパースペクトルイメージ(HSI)データの次元縮小。
【解決手段】HSIデータの各PXに関連した係数のセット(A)、前記係数のセットを生成するために使用される基底ベクトル(BV)のセット(B)、及び最大エラー値(C)の受取、前記Bに関連する各PXのための第一セットのエラー(D)と、前記Bのサブセットと関連する各PXのための更なるセットのエラー(E)との計算、前記各D及びEに関する、前記最大エラー値を超えるエラーを有する空間ピクセルの数の%(F)の計算、前記各D及びEに関連する複数の縮小因子(G)の計算(前記Gは、前記Fと、前記HSIデータに関連するスペクトル次元数の両方に基づいて計算)、前記Fからの最大縮小因子と、及びこれらに関連した前記BVのセット又は前記BVのサブセットの最適サイズとの選択、を含む。
(もっと読む)
植物種特定のためのプログラム、情報処理方法及び装置
【課題】成長度合いが異なっていても特定の植物が存在しているか否かを判定できるようにする。
【解決手段】本情報処理方法は、測定波長領域のうちクロロフィル含有量の変動による影響が現れる所定領域以外の領域について、照合対象のスペクトルデータと樹木の基準スペクトルデータとの間の類似度を算出する算出処理と、算出された類似度を所定の閾値とを比較する処理とを含む。これにより、クロロフィル含有量の変動による影響を排除でき、正しく樹種を特定できるようになる。
(もっと読む)
建物輪郭抽出装置、建物輪郭抽出方法及び建物輪郭抽出プログラム
【課題】空中写真画像及びDSMに基づく建物輪郭の抽出において、建物の周囲の環境は建物ごと、及び1つの建物の周りにおいても違いがある。
【解決手段】位置推定部20は、抽出対象領域における建物の概略位置に関し、DSMデータに基づいて、建物に応じた大きさの地上表層の凸部毎に、当該凸部を内包した位置推定領域を定める。領域分割部22は抽出対象領域を、それぞれ凸部領域より小さい領域であり、DSMデータから得られる高さと空中写真画像から得られるスペクトル情報とを含む属性が当該領域内で一様となる複数の小片領域に分割する。概略形状抽出部24は位置推定領域にて、属性が類似性を有する一群の小片領域を統合して建物の概略形状を抽出する。輪郭決定部26は概略形状に基づいて、多角形で表される建物輪郭を求める。
(もっと読む)
地物情報判読用画像生成方法
【課題】SAR画像等の単偏波レーダ画像と多偏波レーダ画像とを組み合わせて、より正確な地物情報の判読が可能な合成画像を生成する。
【解決手段】飛翔体に搭載したレーダ装置から得られる、偏波を利用して撮影されたレーダ画像データを基に地物情報判読用画像を生成する際、まずレーダ装置で撮影された地域の低解像度の多偏波レーダ画像データの各々に色情報を割り当てる。次に、その色情報が割り当てられた低解像度の多偏波のレーダ画像データと、レーダ装置で撮影された地域の高解像度の単偏波レーダ画像データを合成し、高解像度のカラーレーダ画像データを得る。
(もっと読む)
植物種特定のためのプログラム、情報処理方法及び装置
【課題】樹木に加えて土が一部に現れている状況においても特定の植物が存在しているか否かを判定できるようにする。
【解決手段】本方法は、(A)可視光領域のうち樹木の特徴が現れる第1の領域を少なくとも含む領域について、照合対象のスペクトルデータと樹木の基準スペクトルデータとの間の第1の類似度を算出するステップと、(B)近赤外光領域のうち樹木の特徴が現れる第2の領域を少なくとも含む領域について、照合対象のスペクトルデータと樹木の基準スペクトルデータとの間の第2の類似度を算出するステップと、(C)第1の類似度と第2の類似度とを重み付け加算して第3の類似度を算出するステップと、(D)第3の類似度と所定の閾値を比較するステップとを含む。そして、第2の類似度の重みより第1の類似度の重みが大きい。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】撮影時の照明光のスペクトル及び撮影手段の分光感度の少なくとも一方が異なる条件で撮影された複数の画像間での対応点検出精度を向上させる。
【解決手段】分光反射率画像生成部11a、11bで、マルチバンド画像の画素値、撮影時のカメラの分光感度、観察照明光のスペクトル、及び被写体の統計的性質から求められた先見情報を用いて、ウィナー推定により画素毎の分光反射率を推定し、推定した分光反射率を画素値とする分光反射率画像を生成する。RGB画像生成部12a、12bで、分光反射率画像と予め定めた照明光スペクトルと予め定めたカメラの分光感度とを掛けあわせてRGB画像を生成する。白黒画像生成部13a、13bで、RGB画像から白黒画像を生成し、位相画像生成部17a、17b、相関画像生成部18、及び対応点検出部19で、2つのマルチバンド画像間の対応点を検出する。
(もっと読む)
画像処理装置、画像処理方法
【課題】波長帯の異なる領域を抽出するための閾値を自動的に決定する。
【解決手段】高空から撮影した地理画像データにおける画素において、第1の波長帯の分光輝度値と、記第1の波長帯とは異なる第2の波長帯の分光輝度値と、に基づいて画素を識別するための正規化指標値を演算する正規化指標演算部と、各画素における前記正規化指標値と出現頻度との関係を求め、クラス内分散とクラス間分散の比である分離度が最大となる正規化指標値を判別分析法により求め、前記画素を識別するための閾値として決定する閾値決定部と、前記閾値と対応する正規化指標値に基づいて、前記第1及び第2の波長帯により区別される画像データの領域を抽出する領域抽出部と、を有することを特徴とする画像処理装置。
(もっと読む)
土地状態推定システム及び土地状態推定方法
【課題】 3時期以上の衛星画像において、各時期の画像のピクセルごとに計算できる任意の一つの指標値を用いて、対応する土地の状態を推定できる土地状態推定システムを提供することを課題とする。
【解決手段】 なんらかのイベント(例えば、津波、等)発生前とイベント発生後とその後の少なくとも1時期の合計3時期以上の衛星画像における、位置的に対応する、ピクセルごとに計算できる任意の指標値から、対応する土地の状態を表す特徴量を推定することを特徴とする。
(もっと読む)
対象物識別方法と装置
【課題】対象物が太陽に直接照らされていても、対象物が遠くに位置していても、対象物を撮像して得た画像において、対象物の位置を識別できるようにする。
【解決手段】第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部3を、対象物1に取り付ける。第1の波長域の光を第1撮像部5aに入射させ、かつ、第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収する第1光学系6と、第2の波長域の光を第2撮像部5bに入射させる第2光学系8と、を用意する。第1撮像部5aにより、第1光学系6を介して、対象物1を含む領域を撮像して第1画像を生成するとともに、第2撮像部5bにより、第2光学系8を介して、対象物1を含む領域を撮像して第2画像を生成する。第1画像の各画素の輝度Aと、対応する第2画像の画素の輝度Bとの比率B/Aを求め、この比率に基づいて、光学特性部3の位置を特定する。
(もっと読む)
画像取得装置
【課題】変動状態のスペクトルカメラにより精度の高い光スペクトル画像を取得可能な、或は光スペクトル特性付の3次元データを取得可能な画像取得装置を提供する。
【解決手段】時系列に連続するフレーム画像で構成される動画像を取得する第1カメラ14と、第1カメラと既知の関係にあり、測定対象の光スペクトル画像を複数取得する第2カメラ15と、撮像制御装置21とを具備し、撮像制御装置21は、1つのフレーム画像から複数の特徴点を抽出し、特徴点を時系列に連続するフレーム画像中に順次特定し、複数の光スペクトル画像と対応するフレーム画像について特徴点に基づきフレーム画像間の画像マッチングを行い、該画像マッチングで得られた条件に基づき複数の光スペクトル画像を合成する様構成した。
(もっと読む)
ステレオマッチング処理装置、ステレオマッチング処理方法、及び、プログラム
【課題】ステレオ画像から、同一の点を撮像している対応点を求めて、視差を算出する際において、処理の高速化を図り得る、ステレオマッチング処理装置、ステレオマッチング処理方法、及び、プログラムを提供する。
【解決手段】ステレオマッチング処理装置100は、ステレオ画像の互いに対応点の組を特定し、組毎に視差を算出する視差算出部30と、ステレオ画像を分割する画像分割部40と、分割部分毎に、当該部分中に存在する対応点の組を特定し、これについて算出された視差の値に基づいて、当該部分の視差の最大値と最小値とを特定して視差探索範囲を設定する視差探索範囲設定部50と、分割部分毎に、対応点の組を新たに複数特定し、新たに特定した各組について、視差を算出し、その値が当該部分の視差探索範囲に収まる場合に、算出した視差を、当該部分における新たに特定した当該組の視差として出力する視差算出部60と、を備えている。
(もっと読む)
森林地立体画像生成方法
【課題】 平面的なカラー写真を用いないで、森林の各樹木に立体感があって、かつ表層下の状況も一目で把握させることができる森林地立体画像生成方法を得る。
【解決手段】
DEMを記憶したデータベース10とDSMを記憶したデータベース11とDHMデータ作成部12とDSM赤色立体画像作成部14とレースケール画像化部16と緑系色画像化部18と乗算部23等を備えて、樹木の樹木高に応じた色をその樹木に割りあてた画像(樹高区分図)を作成して、これを立体的にした森林地立体画像と称する。
(もっと読む)
領域抽出方法、領域抽出プログラム及び領域抽出装置
【課題】航空写真等のデータに基づいて、建物の領域を、より正確に抽出する技術を提供する。
【解決手段】航空写真等のデータに基づいて建物の領域を抽出するに際し、複数の異なる離散化幅を設定し、それぞれの離散化幅について、データの輝度値を当該離散化幅で離散設定された複数の値に離散化する。また、離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出する。そして、複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する。
(もっと読む)
三次元地図作成装置およびその窓領域検出装置
【課題】高層ビルを含む全てのビルを映し出すことの可能な鳥瞰画像に基づいて、建物の窓領域を自動的に抽出する三次元地図作成装置およびその窓領域検出装置を提供する。
【解決手段】本発明の窓領域検出装置は、注目ビルの鳥瞰画像から、画像特徴量が類似して周期的に検出される複数の窓領域候補を検出する窓領域候補検出部104と、複数の窓領域候補を、その特徴量および位置情報に基づいて複数のクラスタに分類するクラスタリング部105と、クラスタリングの結果に基づいて、注目ビルの窓パターンを分類する窓パターン分類部107と、窓パターンに応じたエッジ情報に基づいて注目ビルの消失点を算出する消失点算出部107と、消失点の算出結果に基づいて注目ビルの鳥瞰画像を正面化する正面化部109と、正面化された注目ビルの鳥瞰画像に、窓パターンに応じて欠損窓を補完する欠損窓補完部110とを具備した。
(もっと読む)
画像の表示
【課題】合成開口レーダー画像の特徴に基づいて画像を表示する装置を提供する。
【解決手段】画像110を処理する方法及び装置である。第1画像132において識別された第1特徴136のクラスタ156が識別される。複数のクラスタのうちの各クラスタは、第1特徴136からの第1グループの特徴159を含む。複数のクラスタのうちの各クラスタを、第2画像134において識別された第2特徴138からの第2グループの特徴163を含む対応するクラスタ161とともに表示するための変換155は、第1画像の第1特徴と、第2画像の第2特徴との間の初期対応を使用して識別される。第1特徴のクラスタからのクラスタのセット162は、各クラスタに対して識別された変換を使用して識別される。第1画像を第2画像とともに表示するための最終変換172は、クラスタのセットを使用して識別される。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】種々の撮影対象について、ステレオマッチングにおける誤対応をより正確に検出することが可能な画像処理装置、画像処理方法および画像処理プログラムを提供する
【解決手段】画像処理装置201は、撮影対象を異なる方向から撮影して得られた複数の画像について、複数の画像間における画素の対応付けを行なうことにより視差を算出するためのステレオマッチング部10と、ステレオマッチング部10によって算出された視差に基づいて、画像における各画素の位置を3次元座標系における3次元座標に変換するための3次元座標計算部20と、3次元座標計算部20によって変換された各画素の3次元座標に基づいて、ステレオマッチング部10によって行われた対応付けの誤りを検出するための誤対応検出部30とを備える。
(もっと読む)
DTM推定方法、DTM推定プログラム及びDTM推定装置、並びに、3次元建物モデルの作成方法
【課題】LiDARデータに基づいて推定されるDTMの精度を高める。
【解決手段】航空機による地表のレーザースキャナーデータに基づいて、その所定範囲について地表面のみの標高データであるDTMを推定するDTM推定方法であって、所定範囲における単位グリッド内にデータが存在しない画素を連結して河川領域を抽出し、河川領域を除くデータについて、第1の最大許容傾斜値(例えば3度)を設定して暫定的なDTMを推定し、推定したDTMから局所的な傾斜を計算し、傾斜が所定値を超える場合は、第1の最大許容傾斜値より大きい第2の最大許容傾斜値(例えば4.5度)を設定して再度DTMを推定する。
(もっと読む)
単画像からのステレオペア検索装置及びステレオペア検索方法
【課題】複数の単画像にオーバーラップ領域がある場合、その複数の画像の組合せの中から、ステレオ画像と同等の効果を持つステレオペアを検索する。
【解決手段】画像検索場所の地理座標情報と人工衛星により撮影された衛星画像を格納する衛星画像撮影データベースに格納された衛星画像のポリゴン情報とに基づいて、前記画像検索場所とオーバーラップする領域を有する衛星画像を検索する衛星画像検索部と、検索された衛星画像が複数存在する場合に、複数の前記衛星画像のそれぞれの組み合わせについて、各衛星画像を撮影した際の人工衛星の位置座標と衛星画像の中心座標とを3次元で特定する衛星位置特定部と、前記複数の衛星画像のうちの任意の対となる第1の衛星画像と第2の衛星画像とに対応する前記人工衛星位置座標と前記中心座標と、に基づいて、ステレオペア条件を満たす衛星画像の対を抽出するステレオペア画像抽出部と、を有するステレオペア検索装置。
(もっと読む)
植物種識別方法及び植物種識別装置
【課題】熟練度に左右されることなく正確且つ効率的に植物種を識別し得る植物種識別方法及び植物種識別装置を提供する。
【解決手段】識別対象のスペクトルデータをスペクトルセンサにより取得するステップS1と、スペクトルデータに含まれる複数の特異点のデータを所定の演算式で演算することにより演算値を求めるステップS3と、予め植物種毎に取得されたスペクトルデータに含まれる複数の特異点のデータを所定の演算式で演算することにより得られる参照値と、演算値とを対比することにより、識別対象の植物種を識別するステップS4とを有し、所定の演算式は、第1の波長領域において極大な第1の特異点aの値と、第1の波長領域と異なる第2の波長領域において極大な第2の特異点cの値との比を求める式である。
(もっと読む)
1 - 20 / 222
[ Back to top ]