
Fターム[5B057AA15]の内容
Fターム[5B057AA15]に分類される特許
1 - 20 / 50
画像処理装置、画像処理方法及びコンピュータプログラム
三次元測定対象物の形態調査方法
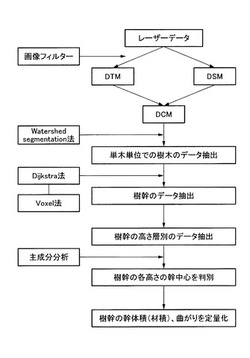
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
食用果実の検査方法、検査装置およびプログラム

【課題】食用果実の内部を精度よく検査する検査方法を提供する。
【解決手段】食用果実の内部を検査する食用果実検査装置が行うとき、前記検査装置は、食用果実の内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶する。食用果実の内部を検査するとき、前記検査装置は、検査用食用果実の所定の波長帯域における透過光画像を取得し、取得された透過光画像と、前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出する。さらに、前記検査装置は、前記疑第1領域の幾何学形状の特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する。
(もっと読む)
カラー画像に含まれる植生領域の判別方法、判別装置、判別システム、及び判別プログラム
【課題】季節変化や太陽光等のデータ取得条件の影響を低減しつつ、カラー画像から植生領域を抽出し、植生領域において、無害植生領域(芝領域)と有害植生領域とを適切に判別することが可能な、判別方法を提供する。
【解決手段】カラー画像の各画素におけるRGB値の大小関係を用いて、植生領域を構成する画素を抽出し、抽出した植生領域の各画素について、R成分値をG成分値で除してR/G値を算出し、当該R/G値を用いたヒストグラムを作成し、作成されたヒストグラムから得られる統計量を用いて、植生領域が単一植生領域であるか混在植生領域であるかを分類し、植生領域が混在植生領域に分類された場合、当該植生領域においてR/G値が閾値未満である画素から構成される領域を、有害植生領域と判別する、カラー画像に含まれる植生領域の判別方法とする。
(もっと読む)
植生制御装置、植物育成システム
【課題】種々の園芸設備が備える様々なタイプの光源に対応することができる、植生制御装置を提供する。
【解決手段】本発明に係る植生制御装置は、外乱光源ではない光源を停止させた状態で複数のスペクトル画像を撮影し、各スペクトル画像が相互に一致する時点において、入射光がカメラ撮影に適した状態にあると判定する。
(もっと読む)
自動検卵方法における画像処理装置
【課題】従来の画像処理による自動検卵方法における画像処理装置を改良する。
【解決手段】有精卵内部に光を照射して卵内部にカラー画像を撮影し有精卵の生死及び発育状況を判定する自動検卵方法における画像処理装置において、割卵機から供給搬送される液卵をセンサーを介して装置本体へ検知信号を送信しかつ該検知信号送信によりストロボ制御装置とCCDカラーカメラで液卵の画像取り込みを行うことを特徴とする自動検卵方法における画像処理装置の提供。
(もっと読む)
施肥マップ生成システム,その方法,産業用ヘリコプタ,サーバ,可変施肥機
【課題】広面積の圃場に対してもメッシュ毎の施肥を行ない、的確で効率的な施肥作業を可能とする。
【解決手段】産業用無人ヘリコプタに搭載された各種センサによる圃場のリモートセンシング(遠隔探査)を行い、土壌の画像及び自然光の反射率を計測する。一方、圃場の数地点の土壌をサンプリングして分析し、熱水抽出窒素を得る。得られたリモートセンシングデータと、土壌サンプリングデータとに基づいて、熱水抽出性窒素マップを生成する。この熱水抽出性窒素マップと、作付けする作物や使用する肥料のデータを基に演算処理を行い、例えば、10mメッシュ単位の施肥マップを生成する。生成した施肥マップと、GPS位置情報を基に、自動可変施肥機を自動制御し、適切な肥料を吐出して施肥を行なう。
(もっと読む)
移動体軌跡図作成装置及びコンピュータプログラム
【課題】 移動体の撮影画像の処理に対してPTV法を用いなくても、移動体の軌跡画像の三次元表示を可能とする技術を提供する。
【解決手段】 複数のカメラにより撮影された時系列の画像データから、カメラ毎に、移動体の二次元軌跡画像を作成する手段11を有している。これにより、鳥等の移動体の二次元軌跡画像がカメラ毎に複数枚得られることになる。この二次元軌跡画像は線状の静止画像であるため、バイプレーン法等の三次元軌跡画像再構成手段を適用することで、容易に移動体の三次元の軌跡図を作成することができる。ステレオPTV法を用いる必要がなくなるため、屋外フィールドの鳥などの移動体の軌跡図作成用として適している。
(もっと読む)
農作物管理方法及び農作物管理装置
【課題】 生育中であり且つ購入の予約がなされた農作物が収穫されたか否かを確認することができる農作物管理方法及び農作物管理装置を提供する。
【解決手段】
農作物管理装置1は、農園内で生育中の農作物を撮像するカメラ3と、カメラ3により得られた画像データを記憶する画像情報DB12Dとを備えており、画像情報DB12Dに記憶されている画像データに基づいて、前記生育中の農作物が収穫されたか否かを判定し、その判定結果を示す収穫情報をスピーカ5にて音声出力する。
(もっと読む)
農作物情報管理システム
【課題】農地の環境変化に拘わらず鮮明な農地の画像を取得する。
【解決手段】農地における農作物の情報を取得するデータ収集装置3と、当該データ収集装置3から農作物の情報が送信される情報処理装置2とを含む農作物情報管理システムにおいて、データ収集装置3が、1回の撮像動作により複数の画像を撮像する撮像手段50と、各画像のうち農作物画像を含む評価領域における合焦評価値を算出する画像評価手段71と、各画像の合焦評価値のうち最も高い合焦評価値が算出された画像を選択する画像選択手段72と、選択された画像を情報処理装置2に送信する送信手段73とを備える。
(もっと読む)
農作物購入予約方法、農作物購入予約システム及び農作物購入予約装置
【課題】 生育中である農作物の購入の予約を実現することができる農作物購入予約方法、農作物購入予約システム、及び農作物購入予約装置を提供する。
【解決手段】
農作物の購入の予約を行う予約サーバ1は、カメラ3により得られた生育中の農作物の画像データを記憶する画像情報DB12Dを備えており、画像情報DB12Dに記憶されている画像データに含まれる農作物について予約が可能か否かを判定し、クライアント端末からの要求に応じて、その判定結果が付与された画像データを当該クライアント端末に対して送信する。また、予約サーバ1は、前記クライアント端末から、前記画像データに含まれる農作物の購入の予約に関する予約情報を受け付ける。
(もっと読む)
農作物モニタリング方法、農作物モニタリングシステム及び農作物モニタリング装置
【課題】 生育中である農作物のモニタリングを行う農作物モニタリング方法、農作物モニタリングシステム、及び農作物モニタリング装置を提供する。
【解決手段】
農作物のモニタリングを行うモニタリングサーバ1は、カメラ3により得られた生育中の農作物の画像データを記憶する画像情報DB12Dを備えており、画像情報DB12Dに記憶されている画像データに含まれる農作物の生育状態を判定し、既に購入予約がなされた農作物の生育経過を示す情報の要求を前記クライアント端末から受けた場合、その判定結果が付与された画像データを当該クライアント端末に対して送信する。
(もっと読む)
地表面観察方法
【課題】レーザによる計測のみで土地被覆を判断し、さらに、必要に応じて、土地表面形状を求めることのできる地表面観察方法の提供を目的とする。
【解決手段】飛行体1から地上への多波長のレーザ掃引によって地上から反射した異なる波長成分を有する適数の反射パルスを判定単位として、各判定単位における波長-反射強度分布を基準に判定単位群を適数に分類し、
各判定単位に物性に関連付けられた狭域属性2を付与して土地被覆状態を観察する。
(もっと読む)
関心のある対象に対する植生成長を見積もる方法とシステム
関心のある対象に対する植生成長を見積もる方法が開示される。目標植生は第2検出データセットから識別される(30)。対応する目標植生は第1検出データセット内で識別され(34)、該第1検出データセットは該第2検出データセット(28)の前の時間に収集される(26)。第1統計値は、該関心のある対象に対する該第1検出データセット内の対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる(38)。第2統計値は、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考えられる(40)。侵入速度は該第1統計値と該第2統計値の比較から決定される(42)。 (もっと読む)
周囲形状検出装置、自律移動装置、移動体の操縦補助装置、周囲形状検出方法、自律移動装置の制御方法及び移動体の操縦補助方法
【課題】自律移動装置において、例えば草むらなどが存在する進路において、草むらなどの上面を走行可能な平面として検出してしまうことを防止する。
【解決手段】複数のカメラ3aL,3aRにより基準画像と参照画像とを含むステレオ画像を撮像する撮像手段と、撮像手段により得られるステレオ画像に基づいてこのステレオ画像中の平面領域を抽出するとともに抽出された平面領域以外の領域に対して物体検出処理を行い移動可能領域を検出する制御手段とを備え、第1の波長帯域の反射率と第2の波長帯域の反射率との比が所定値よりも高い点を植物の葉と判別し、撮像手段により撮像された像のうち、植物の葉であると判別された領域を除外し、残余の領域について、平面領域の抽出及び物体検出処理を行う。
(もっと読む)
農作業支援装置
【課題】 間引き作業を支援することができる農作業支援装置を提供する。
【解決手段】
農作業支援装置1は、農作物の複数の苗を撮像するカメラ17と、少なくとも1つの間引き対象の苗が撮像画像中に含まれるように、カメラ17の撮像範囲を決定する撮像範囲決定手段と、その撮像範囲決定手段によって決定された撮像範囲で複数の苗を撮像するようにカメラ17を制御する撮像部制御手段と、その撮像部制御手段による制御にしたがってカメラ17により得られた撮像画像中の複数の苗から間引き対象の苗を特定する間引き対象特定手段と、その間引き対象特定手段によって特定された間引き対象の苗に関する間引き対象情報を出力する間引き対象情報出力手段とを備えている。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
三次元表示を使用する物理パラメータの推定
三次元表示を使用して物理パラメータを推定するための、方法、システム、および装置。一態様では、既定の光パターンを対象物上に投影し、この投影光パターンと対象物の一部分との相互作用から生じる光パターンを検出する。この検出光パターン内の複数の光要素の三次元位置を判定し、この位置に基づいて、対象物の物理パラメータ、例えば重量を推定する。例えば、この方法、デバイス、およびシステムを使用して、家畜動物などの対象物の少なくとも一部分の三次元表示を作り出すことができる。 (もっと読む)
植物の葉片の成長を測定するための方法およびそれに適した装置
本発明は、葉片の成長を測定するための方法および装置に関する。この方法は、a)撮影システムを較正するステップと、b)1枚の葉片の少なくとも2枚の画像を撮像するステップと、c)画像データを処理するステップであって、i)しきい値セグメント化によって葉片をセグメント化することと、ii)複数回の形態学的侵食を行うことと、iii)保管容器の縁部を除去するためにエッジ補正することとを含むステップと、d)3D再構成:ステレオアルゴリズムによって視差マップを生成し、事前に特定された較正パラメータに基づいて、視差マップから3D表面モデルを計算するステップと、e)事前に取得された表面モデルを平滑化するステップと、f)面積値の時系列から成長率を算出するステップとによって特徴付けられる。この装置は、少なくとも1台のカメラと、照明ユニットと、カメラおよび(赤外線)照明用のX/Y平面でのスライドテーブルと、葉片用の保管容器と、電子的解析および制御ユニットとを備える。  (もっと読む)
(もっと読む)
木材の外観検査装置、木材の外観検査方法
【課題】モノクロの濃淡画像に対する画像処理のみで欠陥を正確に抽出することを可能にした木材の外観検査装置を提供する。
【解決手段】ラインセンサカメラにより撮像された濃淡画像が、画像処理装置4に入力される。一次候補抽出部11は、複数の検査対象領域に区画されている木材の表面をラインセンサカメラにより撮像した濃淡画像を2値化し、一次欠陥候補領域を抽出する。二次候補抽出部12は、着目する検査対象領域について木目と欠陥とを分離するように設定した第2のしきい値により濃淡画像を2値化し、二次欠陥候補領域を抽出する。欠陥抽出部13は、二次欠陥候補領域を含む検査対象領域において二次欠陥候補領域に含まれる画素の濃淡値と二次欠陥候補領域の周辺の画素の濃淡値との差分を用いて欠陥を判別する。
(もっと読む)
1 - 20 / 50
[ Back to top ]