
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
2,641 - 2,648 / 2,648
立体視に基づく差し迫った衝突の検知
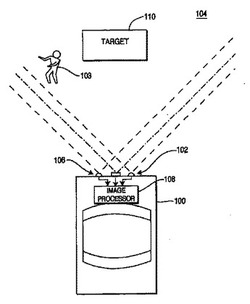
場面の奥行きマップを生成するため処理される画像を生成する立体カメラを有する立体視に基づく衝突回避システム。潜在的な脅威を、奥行きマップにおいて検知する。そして、検知した潜在的な脅威の大きさ、位置、および速度を推定し、推定した位置および推定した速度を用いて、検知した潜在的な脅威の軌道解析を決定する。軌道解析に基づく衝突予測を決定し、衝突が差し迫ったものであるかどうかを、衝突予測および推定された潜在的な脅威の大きさに基づいて決定する。 (もっと読む)
深度データを用いたビジュアルトラッキング

【課題】深度感知撮像技術を用いたリアルタイムビジュアル画像トラッキングにより、照度不変のトラッキング性能が得られる。深度感知(タイムオブフライト)カメラによって、同じ場面がリアルタイムで深度と色を持つ画像として提供される。深度ウィンドウはシャッター速度を制御してトラッキングする領域を調整する。深度画像データからポテンシャル領域が導き出され、トラッキングする目標物体の周縁部の情報が得られる。数学的に表される輪郭はトラッキングする目的物体をモデリングすることができる。この輪郭とトラッキングする目的物体の周縁部との間の適合度を決定し、深度データに基づいて、トラッキングのための位置情報が得られる。画像トラッキングに基づいて深度センサを用いる用途としては、頭部トラッキング、手のトラッキング、姿勢推定、ロボットの命令画定および、その他の人間とコンピュータの相互関係システムが挙げられる。 (もっと読む)
車載カメラの光軸ずれ検出装置
【課題】走行中の振動や周囲温度の変化などによって車載カメラの撮影光軸がずれた場合、そのずれ量を自動的に検出し、この検出に基づいて運転支援システムを動作させることができる車載カメラの光軸ずれ検出装置を提供すること。
【解決手段】フロントガラスなどに設けたマ−ク指標と、カメラ11の撮影画像からマ−ク指標の画像位置を選び、この画像位置情報をフレ−ムメモリに保存するカメラ制御部12と、フレ−ムメモリから読み出した基準となる画像位置情報と、新たに撮影されたマ−ク指標の画像位置情報を比較し、これら画像位置情報の差が所定の範囲内のときはフレ−ムメモリを新たな画像位置情報に更新し、所定の範囲外となるときは警告ブザ−などを起動させ、運転支援システム機能を停止させる車輌制御部14を備えた構成となっている。
(もっと読む)
車両制御装置、プログラム及び方法
【課題】運転者のブレーキタイミングの特性や車両を取り巻く状況に柔軟に対応することができる車両制御を提供する。
【解決手段】車両制御装置は、自車両の外部の画像を撮影する撮影手段と、他車両の接近を検出するためのテンプレートを記憶するテンプレート記憶手段を有する。テンプレートは、運転者のブレーキ操作に基づいて適宜更新される。車両制御装置は、撮影した画像とテンプレートとを比較して、前方を走行する車両が相当接近してきたために、自車両の減速や停止が必要であるか否かの判断を行う認識処理手段をさらに有している。認識処理手段によって減速や停止が必要と判断され、かつ、運転者によってアクセルペダルを戻したりブレーキペダルを踏むなどの衝突回避の操作が行われなかった場合は、動作指示手段によって自車両に衝突回避操作を実行させる。
(もっと読む)
画像処理システム、画像処理方法、画像処理プログラム
【課題】状況に合致して適切に監視対象物の存在領域を特定する。
【解決手段】カメラにより得られる監視対象画像データを取り込む画像取得手段10により得た画像データについてフレーム間差分を行って物体領域検出を行う第1の検出手段11と、前記画像データについて背景差分を行って物体領域検出を行う第2の検出手段12と、前記第1の検出手段11と前記第2の検出手段12により得られた結果に基づいて監視対象の混雑状態を評価し、前記画像データの品質を映像信号に基づき評価する評価手段13の評価結果に基づいて前記第1の検出手段11のみによる出領域または前記第1及び前記第2の検出手段11、12による検出領域を用いるかの選択を行う選択手段14とを具備する。
(もっと読む)
画像検出装置、プログラムおよび記録媒体
【課題】 本発明の目的は、任意の色および任意の形状を有する対象を検出する画像検出装置を提供すること。
【解決手段】 本発明の入力画像501内の対象を検出する画像検出装置107は、対象データが対象を特定する情報と、使用色データと、代表色データと、クラスタ画像とを含むデータベース204と、入力画像501から代表色に同じ色を有する領域を代表色領域709として抽出する代表色領域抽出手段201と、代表色を有する領域とクラスタ画像306の枠との間の相対的な位置関係を用いて、代表色領域709から対象が存在する可能性のある候補領域903を求める候補領域抽出手段202と、クラスタ画像306と候補領域903とを照合し、その照合結果に基づいて、候補領域903を対象が存在する領域として検出する照合手段203とを備える。
(もっと読む)
車両用表示装置
【課題】 視認性の良くない走行環境において前方に存在する障害物を、ドライバが容易に認識させる。
【解決手段】 表示制御装置は、ライトスイッチがオン状態のときには前方視界が良くないと判断できるので、前方障害物センサによる障害物の検出結果と、予め設定された赤外線カメラと当該前方障害物センサとの車両上の配置関係に関する情報とに基づいて、その障害物に相当する部分画像を、当該赤外線カメラによって撮影された赤外画像の中から抽出し、抽出した部分画像を、地図画像情報に基づいて生成した現在位置前方の立体的な地図画像の対応位置に重ね合わせた状態で、表示器に表示する(S1-S2)。
(もっと読む)
車両周辺監視装置及び方法
【課題】 視点位置をダイナミックに変更して、車内の表示装置に運転状況に応じて最適な合成画像を表示することができる車両周辺監視装置及び方法を提供する。
【解決手段】 本発明の車両周辺監視装置は、カメラ101と、アナログ・ディジタル変換器(A/D)102と、フレームメモリ103と、ディジタル・アナログ変換器(D/A)105と、液晶表示装置などのディスプレイ106と、歪み補正のための幾何学変換用テーブルを構成するROM化された変換テーブル107と、視点位置をダイナミックに変更しうるようにするために視点変換用パラメータを供給する視点変換用パラメータ供給手段108と、第1ステップとしてROM化された変換テーブル107に基づいて、各カメラから得られた画像の歪みを補正し、第2ステップとして視点変換用パラメータ供給手段108から供給される視点変換用パラメータに基づいて変換のためのアドレス計算等を高速に行うCPU又はDSP等から構成される画像合成手段104とから構成されている。
(もっと読む)
2,641 - 2,648 / 2,648
[ Back to top ]