
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
81 - 100 / 2,648
赤外線センサを用いた運転者状態監視装置及びその方法
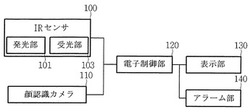
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
(もっと読む)
動き検出装置

【課題】測定対象物の移動方向が変化した場合であっても、これを即時に検出して測定対象物の移動速度を求めることが可能な動き検出装置を提供する。
【解決手段】特徴領域に対応する画素の投票値のうち、中央の画素にピークが存在する場合には、測定対象物の移動方向が反転したものと判断する。そして、移動方向が反転した場合には、各特徴領域に対応する画素の投票値のうち、方向変化前の影響による投票値と方向変化後の影響による投票値に分類する。そして、方向変化後の影響による投票値に基づき、これを補正して測定対象物の速度を算出する。従って、測定対象物の移動方向が変化した場合には、これを即時に認識し、測定対象物の移動速度検出に反映させることが可能となる。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】複数の地物で構成された地物群について、画像認識処理における認識対象を決定するための認識率を適切に決定することが可能な技術を実現する。
【解決手段】単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率ERに基づき認識地物単位毎に決定する認識率決定部26と、認識地物単位のそれぞれの認識率に基づいて、画像認識処理において認識対象とする認識地物単位を選択する認識対象選択部25と、を備え、認識率決定部26は、道路幅方向に分かれて配置された地物群からなる特定認識地物単位については、当該特定認識地物単位を構成する地物の予想認識率ERに基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数Cにより補正して、認識率を決定する。
(もっと読む)
車両周辺監視装置
【課題】ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供する。
【解決手段】車両周辺監視装置は、所定の制御周期毎に、車両に搭載されたカメラによる撮像画像を取得し、今回の制御周期での撮像画像の前回の制御周期からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値を算出し、今回の撮像画像に対して、ピッチング補正値による補正を行った補正画像を生成し、補正画像から対象物を検出する。変位量は、撮像画像から、地平線より上側の所定領域、地平線を含み地平線より下側から上側までの所定領域、又は自車両から所定距離内の先行車両を含む所定領域を監視領域として切出し、今回の制御周期における撮像画像の監視領域と前回の制御周期における撮像画像の監視領域間で求める。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】複数の地物で構成された地物群について、画像認識処理における認識対象を決定するための認識率を適切に決定することが可能な技術を実現する。
【解決手段】画像認識処理を行う範囲として認識地物単位毎に設定される認識要求範囲を取得する認識要求範囲取得部27と、地物の種別毎に予め定められた予想認識率ERに基づき認識地物単位毎に認識率を決定する認識率決定部26と、認識要求範囲が互いに重複する複数の認識地物単位の中から認識率に基づき認識対象とする認識地物単位を選択する認識対象選択部25とを備え、認識率決定部26は、道路長さ方向に分かれて配置された地物群からなる特定認識地物単位について、各時点での各地物の画像認識結果に応じて、当該特定認識地物単位を構成する複数の地物の一部が画像認識された場合には当該特定認識地物単位を構成する残りの地物の予想認識率ERに基づき認識率を決定する。
(もっと読む)
車載用環境認識装置
【課題】より少ない処理負荷で周囲車両のヘッドライト光に起因した誤認識を防ぐことができる車載用環境認識装置を得ること。
【解決手段】車載用環境認識装置100は、画像から光源を抽出する光源抽出部300と、源の画像上の位置に基づいて光源が環境認識の際に誤検知要因となるライトを抽出し、ライトのライト強度と3次元位置と配光パターンの情報を含むライト情報を推定するライト情報部400と、ライト情報に基づいてライトが路面で反射する画像上の路面反射推定画像領域を推定する路面反射推定部500と、路面反射推定画像領域に基づいて自車両の周囲環境を認識する車載用環境認識部600と、を有する。
(もっと読む)
道路状況把握装置
【課題】非監視対象車線を走行する車両の誤判定を防止し、監視対象車線に対する道路状況を正確に判定することが可能となる道路状況把握装置を提供することである。
【解決手段】実施形態に係る道路状況把握装置は、車両が走行する複数の車線からなる道路上の画像を撮像手段により撮像し、この撮像された画像に基づき前記道路の状況を判定する道路状況把握装置において、前記撮像された画像から移動ベクトル画像を作成し、この作成された移動ベクトル画像の方向性とあらかじめ与えられる車両の進行方向情報とから非監視対象車線を走行する車両を検出し、この検出された非監視対象車線を走行する車両の画像を前記撮像された画像から除外することを特徴としている。
(もっと読む)
画像処理方法、ステレオカメラシステム
【課題】より短い処理時間で距離情報が得られる画像処理方法を提供すること。
【解決手段】第1の画像と第2の画像を撮影するステップと、加算手段241が、第1の画像の第1の合計値、及び、第2の画像の第2の合計値を算出する合計値算出ステップと、シフト手段242が記第1の合計値を所定ビット数、右にシフトして第1の近似平均値を算出し、同様に第2の近似平均値を算出する近似平均値算出ステップと、整数倍手段243,244が、第1の画像と第2の画像の小領域内の各画素データの値を整数倍する整数倍ステップと、相関値算出手段249が、該画素データの値を整数倍した値から第1の近似平均値を引いた第1のデータと、画素データを整数倍した値から第2の近似平均値を引いた第2のデータをそれぞれ求め、画素データ毎に前記第1のデータと第2のデータとの差分の二乗和を算出する相関値算出ステップと、を有する画像処理方法を提供する。
(もっと読む)
車両運転支援装置、車両が走行する道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、楕円偏光が優勢な実際の道路環境においても正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】車両の車軸方向(または車両の高さ方向)に2つの偏光カメラを配置して偏光画像撮像系を構築した上で、車軸方向の偏光成分の光強度(H)および当該車両の高さ方向の偏光成分の光強度(V)から算出される偏光状態特徴量を、画像において対をなす画素毎に比較し、その差分が所定の閾値を超える場合に、これを路肩として検出する。検出された路肩の位置情報に基づいて、操舵制御手段、走行速度制御手段および警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
車両検出装置
【課題】複数の映像間で対応をとる特徴点を定めて位置合わせ基準を鮮明にでき、車両の検出精度を向上させる。
【解決手段】実施形態の車両検出装置は、線分成分抽出手段、多角形近似手段及び計測手段を備えている。前記線分成分抽出手段は、左右の撮影画像毎に、当該撮影画像に含まれる前記車両のフロントガラス領域と車体との境界を示す複数の線分成分を抽出する。前記多角形近似手段は、前記左右の撮影画像毎に、当該抽出された複数の線分成分の幾つかを用いて閉ループを構成する多角形近似を行う。前記計測手段は、前記左右の撮影画像毎に前記閉ループを構成する線分成分を当該左右の撮影画像間で互いに位置合わせし、当該位置合わせした線分成分間の座標情報と、左右の撮影画像を撮影した撮影位置を示す撮影位置情報とに基づいて、前記閉ループの位置を前記車両の位置として計測する。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法
【課題】移動体を高い精度で検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】検出ブロック設定部107は、撮像画像上で複数の画素で構成される任意の大きさの検出ブロックを複数設定する。評価値算出部109は、任意の時点tの撮像画像上で、設定した各検出ブロックが移動体の候補領域であるか否かを評価する評価値を検出ブロック毎に算出する。選択部110は、算出された評価値に基づいて、候補領域であると評価された1又は複数の検出ブロックを選択する。移動体領域検出部112は、選択した検出ブロックの撮像画像上の位置及び大きさに基づいて、撮像画像上の移動体領域を検出する。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】駐車場の設計態様などの影響を受けることなく、任意の駐車目標スペースを駐車支援の対象として設定することができる駐車支援装置を提供する。
【解決手段】自車両の周囲の俯瞰画像に、自車両に対して所定位置に配置された仮駐車設定枠が重畳された設定情報を生成し、ディスプレイに提示する設定情報提示機能と、仮駐車設定枠の自車両に対する位置を変更し、変更された仮駐車設定枠の位置を含む設定指令を受け付ける設定指令取得機能と、自車両に対する位置が設定された仮駐車設定枠に対応する駐車スペースを、自車両を駐車する駐車目標スペースとして設定する駐車目標スペース設定機能と、設定された駐車目標スペースに自車両を誘導する車両誘導機能と、を実行する制御装置10を備える。
(もっと読む)
車軸検出装置
【課題】積雪時など路面部分の距離分布の計測精度が低下する場合であっても、車軸の検出精度の低下を防止できる。
【解決手段】車軸検出装置(10)は、路面と照射光軸が交わるように赤外線を照射する赤外線照射部(121)と、赤外線が照射された被写体からの反射光をそれぞれ受光して、被写体像を取得する複数の画像取得部(123)と、複数の画像取得部(123)でそれぞれ取得された複数の被写体像に基づいて、前記被写体までの距離分布を検出する距離分布検出部(126)と、被写体に車両が含まれない場合の該被写体までの距離分布である背景距離分布を記憶する背景距離分布記憶部(131)と、検出された距離分布から車両に対応する部分の距離分布を車両距離分布として抽出する車両距離分布抽出部(132)と、抽出された車両距離分布と記憶された背景距離分布とが位置的に連続している場合に、車軸ありと判定する判定手段と、を具備する。
(もっと読む)
車両周辺監視システム
【課題】複数の撮影画像から生成される俯瞰画像の重複領域に現れる物体の撮影方向に関する運転者の理解を容易にする車両周辺監視システムの提供。
【解決手段】部分的に重複させた撮影による複数の撮影画像から生成された俯瞰画像セグメントを、互いの重複領域を重ね合わせるように組み合わせて表示用俯瞰画像を生成する。俯瞰画像における重複領域に重複する撮影画像の境界領域を表す境界指標を付与した境界付き俯瞰画像が表示された後に、俯瞰画像における重複領域に予め設定された融合関係で融合して得られた融合重複画像を用いた融合俯瞰画像が表示される。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム
【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、車両の走行する道路の路面色が変更した変更地点よりも進行方向側に停止線候補の路面標示を検出し、且つ該変更地点から車両の進行方向の所定距離以内に停止線候補の路面標示を検出した場合に、該停止線候補を停止線と特定するように構成する。
(もっと読む)
撮像システム
【課題】複数のカメラからの画像を連結し一巡して表示する場合、全ての連結部において画像の切れ目を目立たなく表示する。
【解決手段】画像処理部16は、複数の撮像部1〜4からの画像信号を合成して合成画像を生成するとともに、画像内の信号レベルにグラデーション処理を行なう。信号レベル検出部14は、複数の撮像部からの画像信号のうち互いに重複する領域における信号レベルを検出する。グラデーション制御部15は、各撮像画像の重複領域における信号レベルを所定のレベル差以下となるよう画像処理部16に対してグラデーション処理量を設定する。
(もっと読む)
ライト検出装置、ライト検出プログラム、およびライト制御装置
【課題】撮像画像中から他車両のライトを検出するライト検出装置において、車両のライトに類似する特徴を有する光源を識別し、車両のライトを良好に検出する。
【解決手段】ライト制御システム1においては、自車両の周囲を撮像した撮像画像を取得し(S110)、撮像画像中の光源を抽出する(S120)。そして撮像画像中を複数に区分した領域毎に他車両が存在する確度が設定された領域確度マップに基づいて、該光源毎に光源が他車両のライトである確度を表す領域確度を演算する(S150)。また各光源における形状を含む特徴量が車両のライトが有する特徴量と一致する確度に応じて、各光源が他車両のライトである確度を表す特徴確度を演算し(S150)、各光源に対して領域確度および特徴確度に基づく最終確度を演算し、予め設定された閾値以上となる最終確度を有する光源が他車両のライトである旨を出力する(S150,S190)。
(もっと読む)
撮像装置及びこれを備えた物体検出装置、並びに、光学フィルタ及びその製造方法
【課題】受光素子1画素程度の微小領域ごとに領域分割された偏光フィルタ層や分光フィルタ層を積層した構造を実現することを課題とする。
【解決手段】画像センサ206の前段に配置される光学フィルタは、特定方向の偏光成分Pのみを選択して透過させる鉛直偏光領域と該特定方向とは異なる方向の偏光成分Sのみを選択して透過させる水平偏光領域とが撮像画素単位で領域分割された偏光フィルタ層222と、赤色波長帯の光のみを選択して透過させる赤色分光領域と波長選択を行わずに光を透過させる非分光領域とが撮像画素単位で領域分割された分光フィルタ層223とを、光透過方向に積層した構成を有し、積層方向下側に位置する偏光フィルタ層の積層方向上面の凹凸を充填材224で充填して平坦化した後に分光フィルタ層を形成したものである。
(もっと読む)
移動体検出装置、移動体検出システム、コンピュータプログラム及び移動体検出方法
【課題】人手を介さずに非車両パターンの収集を自動的に行うとともに収集した非車両パターンを用いて車両などの移動体を高精度に検出することができる移動体検出装置、移動体検出システム、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】負例特徴量算出部108は、時刻tから所定時間Ts経過後の時刻(t+Ts)での撮像画像上で時刻tでの撮像画像上で特定された移動体候補領域の対応領域の画素値に基づく特徴量を算出する。負例類似度算出部109は、移動体候補領域の特徴量と対応領域の特徴量との類似度を算出する。負例登録部110は、算出した類似度が所定の閾値S以上である場合、移動体候補領域を非車両パターンとして登録する。
(もっと読む)
81 - 100 / 2,648
[ Back to top ]