
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
121 - 140 / 2,648
測距装置
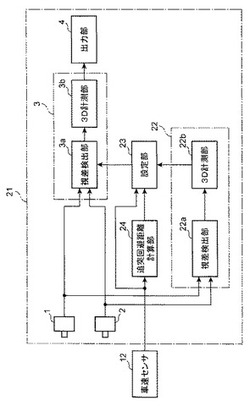
【課題】ステレオカメラの撮像画像の視差から対象物までの距離分布を求め、先行車の検知に使用される測距装置において、距離分布演算の計算時間を短縮し安全性を向上する。
【解決手段】測距装置21は、低速高精度な第1の距離分布演算部3と、高速低精度な第2の距離分布演算部22と、追突回避距離計算部24とを備え、車速センサ12からの車速情報は追突回避距離算出部24に入力され、この追突回避距離算出部24において車速に対応した追突回避距離が求められ、設定部23は、第2の距離分布演算部22の3D計測部22bで求められた距離分布の内、前記追突回避距離から±αの距離に該当する部分を、第1の距離分布演算部3の処理領域に設定する。
(もっと読む)
歩行者認識装置

【課題】認識条件の決定精度の向上と共に、計算時間の短縮を実現することができる歩行者認識装置を提供することを課題とする。
【解決手段】本実施形態によれば、時系列の環境データに基づいて、自車両周辺の交通環境を認識し、当該認識した当該交通環境に関するデータに基づいて、歩行者認識で用いる学習済み識別器または歩行者認識用テンプレートを選択し、時系列の環境データおよび選択された学習済み識別器または歩行者認識用テンプレートに基づいて、歩行者の認識を行う。
(もっと読む)
標識認識装置及び標識認識方法
【課題】 標識認識を効率よく行うことのできる標識認識装置を提供する。
【解決手段】 車両に搭載されて標識を認識する標識認識装置1は、車両の前方を撮影して画像を取得するカメラ10と、カメラ10にて得られた画像内の標識存在認識エリアEAにおいて、標識存在認識(第1の認識レベルでの標識認識)を行う標識存在認識部31と、カメラ10にて得られた画像内の標識存在認識エリアEAとは異なる標識内容認識エリアCAにおいて、標識内容認識(第1の認識レベルより高い第2の認識レベルでの標識認識)を行う標識内容認識部33を備える。これにより、複数の認識エリアEA,CAについて、それぞれ異なる認識レベルで標識を認識するので、画像内で高い認識レベルが必要とされない部分の認識レベルを落とすことで、全体として標識認識の効率を向上できる。
(もっと読む)
駐車支援装置
【課題】自車両が移動しても駐車スペースが表示画面に表示される俯瞰映像をリアルタイムにユーザに提供すること。
【解決手段】駐車支援装置1は、車両を駐車させるための駐車目標位置を第1俯瞰映像より検出する駐車目標位置検出手段34と、視点位置を決定する視点位置決定手段34と、回転量を決定する回転量決定手段34と、視点位置と回転量とに基づいて第1俯瞰映像を回転させる視点変換テーブルを作成する視点変換テーブル作成手段35と、視点変換テーブルに基づいて第1俯瞰映像より第2俯瞰映像を生成する第2俯瞰映像生成手段36とを有する。
(もっと読む)
物体検出装置、物体検出方法、および物体検出プログラム
【課題】カメラで撮像した2次元の撮像画像を処理して、全体が単一色でなく、帯模様が形成されているパイロン等の物体について、その検出精度を向上させた物体検出装置を提供する。
【解決手段】物体検出装置1は、画像処理部13が画像入力部12に入力されたカメラ2の撮像画像を処理し、撮像されている物体を検出する。画像処理部13は、画像入力部12に入力された撮像画像について、彩度が設定した彩度閾値よりも高い高彩度領域を抽出する。そして、抽出した2つの高彩度領域を凸包する凸包領域を設定する。そして、物体領域検出処理では、凸包領域設定処理が設定した凸包領域内における2つの高彩度領域間に位置する低彩度領域がこれら2つの高彩度領域をつなぐ独立した領域であるかどうかを判定する。
(もっと読む)
路面画像処理システム及び路面画像処理方法
【課題】ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【解決手段】本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】自車両を駐車可能な駐車枠をユーザに適切に提示できる駐車支援装置を提供すること。
【解決手段】自車両周囲の画像から変換した俯瞰画像内に含まれる、路面上に描画された線状のロードマークを検出し、前記線状のロードマークが複数検出された場合に、複数の前記線状のロードマークのそれぞれについて、検出された他の線状のロードマークに対する平行度を算出し、前記平行度算出手段により算出された平行度が所定の閾値以上である場合に、前記俯瞰画像中に、自車両が駐車可能な駐車枠が存在していると判断する際において、前記線状のロードマークの前記俯瞰画像中における存在位置に応じて、前記閾値を変更する駐車支援装置。
(もっと読む)
走行可能領域検出装置及びプログラム
【課題】走行可能領域と走行不可能領域との境界が不明瞭な場合であっても、適切に走行可能領域を検出する。
【解決手段】モノジェニック信号変換部22で、取得した画像の各点を、局所領域内の輝度値の変化の極大点及び極小点の一方を0度、他方を180度で表したときの各点の局所位相を含むモノジェニック信号に変換し、局所コスト算出部24で、局所位相が90度に近いほど小さくなる局所コストを、走行可能領域の左端に相当する点と、走行可能領域の右端に相当する点との組み合わせ毎に算出する。最適経路探索部26で、画像上での走行可能領域の形状に基づいて、経路を構成する各点が連続する方向に制限を設けた複数の経路各々に沿って、局所コストを累積した累積コストを算出し、累積コストが最小となる最適経路を探索する。領域検出部28で、最適経路に基づいて、走行可能領域を検出する。
(もっと読む)
区画線認識装置、区画線認識方法、プログラム及び媒体
【課題】より適切な警報を行ってドライバに自車両を自車線の中央を維持する走行を適切に促すことができる区画線認識装置を提供すること。
【解決手段】本発明による区画線認識装置1は、車両の前方の路面を含んで撮像する撮像手段2と、撮像手段2の出力する画像情報から路面内のエッジ点を抽出するエッジ点抽出手段3aと、エッジ点から区画線に相当する可能性を有する線分群を抽出する線分抽出手段3bと、線分群から区画線に相当する線分を検出する検出手段3cと、を含み、検出手段3cによる検出が所定未検出回数N以上なされない場合に、所定再検出回数M以上連続して、検出手段3cによる検出がされた場合に、検出を確定する確定手段3dを含むことを特徴とする。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
画像生成装置
【課題】認識された立体物と、当該立体物の撮影画像である立体物画像の領域に合成される代替画像との視認性を高めること。
【解決手段】画像生成装置であって、車両の周辺領域に存在する立体物を認識して当該立体物の属性を示す立体物属性情報を出力し、立体物属性情報に含まれている位置情報に基づいて撮影画像における立体物の画像領域である立体物画像領域を決定し、立体物属性情報に含まれている色情報に基づく色で色付けられた立体物の代替画像を、立体物属性情報に含まれている種別情報に基づいて出力し、立体物画像領域の位置に代替画像出力部から出力された代替画像が合成されている代替画像付き俯瞰画像を生成する画像合成部を備えている。
(もっと読む)
道路勾配推定装置
【課題】片側の白線のみからでも車両前方の道路の道路勾配を推定可能な道路勾配推定装置を提供する。
【解決手段】画像処理部4で抽出した白線が破線であるとき、その白線のペイント部分と非ペイント部分の境界である端点を抽出する端点抽出部6と、視点変換処理を行い、車両前方の道路の道路勾配が、車両が走行している位置での道路勾配で一定であると仮定したときの各端点の見かけ上の位置を求める視点変換処理部7と、隣り合う端点間の見かけ上の距離と、予め求めた隣り合う端点間の実際の距離とに基づき、各端点間の勾配を求める端点間勾配取得部9と、端点間勾配取得部9が求めた各端点間の勾配に、車両が走行している位置での道路勾配を足し合わせることで、端点間の実際の道路勾配を求める道路勾配演算部10と、を備えた。
(もっと読む)
画像生成装置
【課題】認識された立体物と、当該立体物の撮影画像である立体物画像の領域に合成される代替画像との視認性を高めること。
【解決手段】車両の周辺領域を撮影する車載カメラによって取得された撮影画像を上方仮想視点で射影変換することで生成される俯瞰画像を表示画像として出力する画像生成装置。周辺領域に存在する立体物を認識して当該立体物の属性を示す立体物属性情報を出力し、この立体物属性情報に含まれている位置情報に基づいて撮影画像における立体物の画像領域である立体物画像領域を決定し、立体物属性情報に含まれている種別情報と姿勢情報とに基づいて特定された立体物の特定された向き姿勢での代替画像を出力し、この出力された代替画像が立体物画像領域の位置に合成された代替画像付き俯瞰画像が生成される。
(もっと読む)
灯火色識別装置
【課題】所望の光源の灯火色を正確に識別する。
【解決手段】車載カメラ11の露出を信号灯の形状を識別可能な程度に設定し、車載カメラ11が撮像した撮像画像から信号灯に対応する画素集合を抽出し、所定フレーム数の間における画素集合の色空間上における時間変化から信号灯の灯火色を識別し、この時間変化がない場合は、画素集合の中心部から外側に向かう色度の変化から信号灯の灯火色を識別する。これにより、信号灯の灯火色を正確に識別することができる。
(もっと読む)
車両視覚システムの較正方法および車両視覚システム
【課題】車両視覚システムを提供すること。
【解決手段】車両視覚システムは、非線形ひずみのある画像をその各々が取得する複数の画像センサ(11〜14)を備えている。車両視覚システムを較正するために、画像センサ(11)を用いて複数の物体の画像(22)を取得し、さらに、追加の画像センサ(13)を用いても複数の物体の画像(22)を取得する。画像センサ(11)と追加の画像センサ(13)は、重複する視野(15,17)を有する。複数の物体(20)に対する、画像センサ(11)の位置および配向は、取得された画像に基づいて判定される。複数の物体(22)に対する追加の画像センサ(13)の位置および配向は、追加の取得された画像に基づいて判定される。追加の画像センサ(13)と画像センサ(11)との相対位置および配向は、これらの判定結果に基づいて確立される。
(もっと読む)
画像処理装置および配光制御方法
【課題】明るさが変化する車両の走行環境において、歩行者等に対するドライバの視認性を向上させる。
【解決手段】画像処理ECU32は、取得した車両前方の撮像画像を、車両から前方のそれぞれの領域までの距離に応じて区画された複数のブロックに分割する画像分割部70と、複数のブロックの画像情報に基づいて、該ブロックに対応する領域のそれぞれについて雰囲気の明るさを推定する明るさ推定部72と、車両からの距離が異なる複数の領域の推定された雰囲気の明るさに基づいて、前照灯ユニットの光により照射が可能な照射領域における雰囲気の明るさの変化を予見する明るさ予見部74と、を備える。
(もっと読む)
走行路認識装置及び走行路認識用プログラム
【課題】高度な計算処理能力を有しない低廉な装置であっても走行車線上の標示線を遠方まで高精度で検出する。
【解決手段】領域解像度設定部16が、外界撮像部11が撮像した画像に対して、移動体の前方かつ近傍に第1画像処理領域を設定すると共に、移動体運動情報取得部14が取得した移動体の速度情報が示す移動体の速度が所定値以上の場合に、移動体の速度が速くなるに従って位置が第1画像処理領域より徐々に遠方となり、かつ移動体の速度が速くなるに従って大きさが第1画像処理領域より徐々に小さくなる第2画像処理領域を少なくとも1つ設定し、領域解像度設定部16で設定された画像処理領域から標示線を検出する。
(もっと読む)
車両用情報伝達制御装置、及び、情報伝達制御方法
【課題】運転行動に不要な情報に誘目され、運転行動を阻害されることを防止するための技術を提供する。
【解決手段】車載カメラで自車両前方の運転視界画像を撮像し(S101)、その運転視界画像上において運転者の注意を強く引く高誘目性領域を推定する(S102)。つぎに、推定した高誘目性領域が運転行動に必要な情報であるか否かを判定する(S103)。要否の判定は、運転視界画像上の高誘目性領域と、注意領域認識部30において認識された注意領域との位置関係に基づいて行う。そして、前記要否判定の結果において運転支援画像上において運転行動に不要で、かつ誘目性の高い領域が存在する場合(S104:YES)、運転視界画像から特定された情報提示フィルタリングの対象となる領域に対応するマスク表示部の該当領域に、運転視界の視認性を低下させるマスク画像を表示する(S105)。
(もっと読む)
画像処理装置、画像認識装置及び方法
【課題】適用範囲が広く、ステレオ画像認識処理に必要なステレオキャリブレーションの自動化に有効な画像処理装置を提供する。
【解決手段】本実施形態によれば、画像処理装置は、画像取得部と、特徴量抽出部と、対応検出部と、算出部とを備えた構成である。画像取得部は、複数のカメラから共通撮影領域に対応する画像データを取得する。特徴量抽出部は、前記カメラ毎の画像データから前記共通撮影領域の特徴量情報として、前記共通撮影領域に存在する同一の実像に基づいた少なくとも2つの平面上パターンを算出する。対応検出部は、前記2つの平面上パターンにおいて前記カメラ毎の画像データ間の対応関係を検出する。算出部は、前記対応検出部により算出された対応関係情報に基づいて、前記カメラ毎の画像間の画像変換パラメータ情報を算出する。
(もっと読む)
環境認識装置および環境認識方法
【課題】処理負荷を軽減すると共にメモリの記憶領域を低減することで、対象物の特定効率の向上を図る。
【解決手段】環境認識装置130は、特定物の形状に関する情報である形状情報を予め保持しておき、検出領域内を分割した複数の対象部位の輝度を取得して、エッジを有する対象部位を抽出し、エッジを有する対象部位の相対距離を取得し、相対距離に応じた形状情報に基づいてエッジを有する対象部位にハフ変換を施し、形状情報で示される特定物を決定する。
(もっと読む)
121 - 140 / 2,648
[ Back to top ]