
Fターム[5B057AA19]の内容
Fターム[5B057AA19]に分類される特許
41 - 60 / 1,263
画像差分検出装置及び画像差分検出プログラム
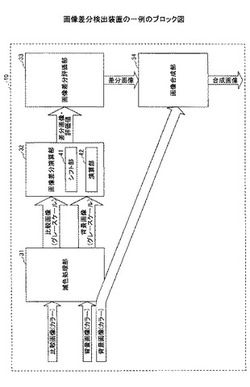
【課題】差分画像を検出する画像間に位置ずれが発生しても意図した差分画像を検出できる画像差分検出装置及び画像差分検出プログラムを提供することを課題とする。
【解決手段】撮影手段により撮影された画像間の差分を検出する画像差分検出装置10であって、異なるタイミングで撮影された第1及び第2の画像の何れか一方をシフトしながら第1及び第2の画像間の差分画像を検出する画像差分演算手段32と、第1及び第2の画像間の差分画像のうち、第1及び第2の画像間の差が最も少ない差分画像を出力する画像差分評価手段33と、第1及び第2の画像間の差が最も少ない差分画像と第1又は第2の画像とを合成した合成画像を出力する画像合成手段34とを有することにより上記課題を解決する。
(もっと読む)
人体動作の認識の方法、装置、及びプログラム

【課題】
異なる動作や異なる個体に対応する人体動作周期及び人体動作を特定すること。
【解決手段】
本発明は人体動作周期を特定し、及び人体動作を認識する方法並びに装置を開示する。ビデオにおける人体動作周期を特定する方法は、所定の探索範囲内において人体姿勢が現在のフレームと類似するフレームを探索し、探索範囲内において人体姿勢が現在のフレームと類似するフレームを探索できた場合に、現在のフレームと前記人体姿勢が現在のフレームと類似するフレームとの間の時間長さをビデオにおける人体動作周期とすることを含む。異なる動作や異なる個体に対して、相応する人体動作周期を特定することによって、時間的・空間的特徴をより正確に抽出し、より正確な人体動作の認識を実現することができる。
(もっと読む)
人体動作周期の特定と人体動作の認識の方法、装置、及びプログラム
【課題】
ビデオにおける人体動作周期を特定し、人体動作を特定すること。
【解決手段】
本発明は、人体動作周期を特定し、及び人体動作を認識する方法及び装置を提供する。前記ビデオにおける人体動作周期を特定する方法は、探索範囲内の各フレームの人体領域を複数の人体部分に区分する処理と、現在のフレームにおける各人体部分の局所動作周期を特定する処理と、前記局所動作周期に基づいて現在のフレームにおける人体動作周期を特定する処理とを含む。異なる動作や異なる個体に対して適応して人体動作周期を特定することによって、時間的・空間的特徴をより正確に抽出することができ、より正確な人体動作認識を実現することができる。
(もっと読む)
画像変換装置、カメラ、画像変換方法およびプログラム
【課題】画像を筒状に連結できる、あるいは、広範囲(最大360度まで)を同時に観察できるというパノラマ画像の特徴を維持したまま、パノラマ画像を部分的に拡大または縮小することのできる画像変換装置、カメラ、画像変換方法およびプログラムを提供すること。
【解決手段】パノラマ画像を入力する画像入力部(12)と、パノラマ画像の連続する領域で拡大率が連続的に変化するように、パノラマ画像のうち所望の領域の拡大率を異ならせて前記パノラマ画像を伸縮する画像伸縮部(13)とを具備する。
(もっと読む)
画像処理装置、画像処理方法
【課題】 高解像度の画像に対してリアルタイムでの物体認識を可能とする技術を提供すること。
【解決手段】 全方位の撮像が可能な撮像装置が撮像した画像を高解像度画像として取得すると共に、該高解像度画像から解像度を低下させた画像を低解像度画像として取得する。低解像度画像から、予め定められた被写体が写っている領域を被写体領域として検出する。高解像度画像において、被写体領域に対応する領域を特定し、該特定した領域に対して、該領域内の被写体を認識する処理を行う。認識結果を出力する。
(もっと読む)
表示制御装置および方法、プログラム、並びに記録媒体
【課題】画面に複数の視点を切り替えて表示させる場合に、できるだけ早く表示遷移を完了させるとともにユーザの操作性を向上させることができるようにする。
【解決手段】複数のカメラにより撮影された画像をそれぞれ取得し、前記取得した画像のうちの所定の画像に表示されている特定のオブジェクトを検知し、前記取得した複数の画像において、前記特定のオブジェクトが検知された前記所定の画像とは異なる別の画像で同一のオブジェクトが検知された場合、前記別の画像のオブジェクトの表示の形態を前記所定の画像のオブジェクトを基準として設定し、同一の画面に表示するように制御する。
(もっと読む)
車両視覚システムの較正方法および車両視覚システム
【課題】車両視覚システムを提供すること。
【解決手段】車両視覚システムは、非線形ひずみのある画像をその各々が取得する複数の画像センサ(11〜14)を備えている。車両視覚システムを較正するために、画像センサ(11)を用いて複数の物体の画像(22)を取得し、さらに、追加の画像センサ(13)を用いても複数の物体の画像(22)を取得する。画像センサ(11)と追加の画像センサ(13)は、重複する視野(15,17)を有する。複数の物体(20)に対する、画像センサ(11)の位置および配向は、取得された画像に基づいて判定される。複数の物体(22)に対する追加の画像センサ(13)の位置および配向は、追加の取得された画像に基づいて判定される。追加の画像センサ(13)と画像センサ(11)との相対位置および配向は、これらの判定結果に基づいて確立される。
(もっと読む)
情報処理装置、情報処理装置の制御方法及びその制御プログラム、情報処理システム、情報処理方法
【課題】すべての者を警告の出力対象とし、あらかじめ登録された者を認証することができた場合に限り例外的に警告を発報しないことで、施設外に出る者を漏らさずチェックすること。
【解決手段】あらかじめ定められた第1の場所を通過した人の行動を判定する行動判定手段と、行動判定手段で判定した結果に応じて、警告情報を生成する生成手段と、人情報データベースにあらかじめ登録された人情報を用いて、あらかじめ定められた第2の場所を通過した人が警告対象か否か認証する人認証手段と、人認証手段による認証結果に応じて、生成手段が生成した警告情報の出力を規制する規制手段と、警告情報を出力する出力手段と、を備えたことを特徴とする。
(もっと読む)
ダンプトラック
【課題】ダンプトラックの形状等の制約を考慮しつつ、複数のカメラ配置を適正化することで、死角のない周辺監視を行うことが可能なダンプトラックを提供する。
【解決手段】ダンプトラック1は、運転席が配置されるアッパデッキ部2Bおよび前後方向に沿って配置された車体フレーム2と、車体前方を撮影可能になるようにアッパデッキ部2Bの前方に設置された前方カメラ11と、車体後方を撮影可能になるように車体フレーム2の後端に設置された後方カメラ16と、車体前方から斜め後方まで撮影可能になるようにアッパデッキ部における左右の側方にそれぞれ設けられた左右側方第1・第2カメラ12,13,14,15と、を備えている。
(もっと読む)
人物属性推定システム、人物属性推定装置、及び人物属性推定方法
【課題】 環境依存属性によらずに推定精度を向上できる人物属性推定システムを提供する。
【解決手段】 人物属性推定システムとしての年齢性別推定システム10は、属性推定対象の人物を撮影して画像を生成する監視カメラ11と、推定パラメータを用いて、監視カメラ11が生成した画像に写っている人物の属性を推定する年齢性別推定部122と、監視カメラ11の設置環境に依存する属性である環境依存属性を指定する環境依存属性指定部124とを備え、年齢性別推定部122は、環境依存属性空間において、環境依存属性指定部124にて取得した環境依存属性から所定の距離内にある環境依存属性を有する学習データに基づいて生成されたパラメータを推定パラメータとして用いる。
(もっと読む)
ステレオカメラ装置、ステレオカメラシステム、プログラム
【課題】2台のカメラで撮像した撮像画像の対応付けを容易にする。
【解決手段】2台のカメラ1、2は、光軸を平行にして配置される。カメラ1、2が撮像した撮像画像の画素の位置は、受光面に規定した2次元の直交座標である第1座標系で表される。また、実空間の点の位置は、カメラ1、2の光学中心を結ぶ第1方向と、カメラごとの光軸の方向である第2方向と、第1方向および第2方向に直交する第3方向との3軸の周りのそれぞれの角度によって表される。演算処理部10は、撮像画像を第1方向の軸周りの角度と第2方向の軸周りの角度とで位置が表される第1変換画像に変換する第1変換部101と、撮像画像を第1方向の軸周りの角度と第3方向の軸周りの角度とで位置が表される第2変換画像に変換する第2変換部102と、第1変換画像および第2変換画像を用いて視差を求める視差推定部103とを備える。
(もっと読む)
全方位監視画像表示処理システム
【課題】単眼カメラで撮影した各フレーム単位の360°監視映像について、その全体映像を細部に亘り明瞭に表示できるとともに、360°監視映像から切り出した切り出し画像に対して細部に亘り明瞭に表示することができる。
【解決手段】ブロッキング輝度伸張処理部20は、画像バッファメモリ13に記憶された楕円面の360°全周入力画像(Pa)とオブジェクト画像バッファメモリ19に記憶された切り出し画像(オブジェクト画像)を処理対象に、表示出力する画像に対して画素単位のブロッキング輝度伸張処理を実施する。
(もっと読む)
画像処理装置及びその制御方法
【課題】 監視対象オブジェクトの個数に上限値を設けながらも、オブジェクト数の個数が上限値以上になった場合であっても、監視対象オブジェクトを含まない特定領域が発生することを抑制する。
【解決手段】 撮像して得られた画像内を解析し、許容最大数Nmax以下の個数であって、予め設定された最小検知サイズ以上のサイズを持つオブジェクトを検出する(S102)。そして、認識されたオブジェクトの数が、許容最大数Nmax以上になった場合には前記最小検知サイズをより大きなサイズに変更する(S105)。また、認識されたオブジェクトの数が、目標最小数Nmin以下になった場合には最小検知サイズをより小さな値に変更する(S107)。
(もっと読む)
画像処理装置、画像処理方法
【課題】 監視カメラ等から得た映像を使用して画面内の特定箇所を物体や人体が通過したことを検知する場合において、画面端付近での誤検知を防止する為の技術を提供すること。
【解決手段】 表示画面内を移動するオブジェクトが、該表示画面内に設定されているオブジェクト検知用領域を通過したことを検知する画像処理装置100において、表示画面の枠部に上記検知を禁止する領域を設定する。そして、設定した領域以外で上記の検知を行う。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の特定精度を向上する。
【解決手段】
環境認識装置130は、検出領域内に存在する対象部位の輝度を取得し、データ保持部152に保持された色識別子と輝度範囲との対応付けに基づき、対象部位の輝度に応じて対象部位に色識別子を設定し(S300)、データ保持部に保持された色識別子と輝度範囲との対応付けに基づき、水平距離の差分および高さの差分が所定範囲内にある、同一の特定物に対応する1または複数の色識別子が設定された対象部位をグループ化する(S304)。
(もっと読む)
環境認識装置および環境認識方法
【課題】雨天時等、光が拡散し易い環境において、対象物の特定精度を向上し、誤認識を回避する。
【解決手段】
環境認識装置130は、検出領域内に存在する対象部位の輝度を取得し、データ保持部152に保持された色識別子と輝度範囲との対応付けに基づき、対象部位の輝度に応じて対象部位に色識別子を設定し(S300)、データ保持部に保持された特定物と色識別子との対応付けに基づき、水平距離の差分および高さの差分が所定範囲内にある、同一の特定物に対応する1または複数の色識別子が設定された対象部位をグループ化して対象物とし(S302)、対象物のうち、光が拡散する環境か否かに応じて選択した色識別子が設定された対象部位で特定される外縁を、対象物の外縁とする(S304)。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の特定精度を向上し、誤認識を回避する。
【解決手段】
環境認識装置130は、対象部位の輝度から、対象部位に対応する特定物を仮決定し(S302)、同一の特定物に対応すると仮決定された隣接する対象部位をグループ化して対象物とし(S304)、対象物からの水平距離の差分および高さの差分が第1所定範囲内にある、対象物と輝度に関して同一の特定物に対応する対象部位を対象物とし(S308)、対象物内の特定領域における全ての対象部位に対する、輝度が所定の輝度範囲に含まれる対象部位の割合が所定閾値以上であれば、その対象物を特定物として決定する(S310)。
(もっと読む)
通行監視システム
【課題】複数の監視カメラを用いることなく監視カメラの死角を解消することにより、立入制限エリアへの非許可者の不正侵入を確実に監視し得る通行監視システムを得る。
【解決手段】通行監視システムは、所定の出入口の近傍領域を第1方向から撮影するカメラ1と、カメラ1の画角内において、第1方向とは異なる第2方向から出入口の近傍領域が映るように配置された鏡11と、カメラ1によって撮影された映像内の鏡11に映し出された第1映像と、カメラ1によって第1方向から出入口の近傍領域を撮影した第2映像とに基づいて、出入口を通行する人物が一か複数かを判定する処理部4とを備え、処理部4は、第1映像に基づき第1のアルゴリズムを用いて人物の単複判定を行い、第2映像に基づき第1のアルゴリズムとは異なる第2のアルゴリズムを用いて人物の単複判定を行う。
(もっと読む)
人体検出装置
【課題】人体やペットの移動方向を確実に得られることができるようにするとともに、移動領域の長手方向を確実に得られることができるようにすることを目的とする。
【解決手段】住宅内の床面を撮影するとともに、撮影方向が床面と垂直になる位置に撮影装置1を設置し、撮影装置1によって撮影された画像の変化領域を解析して移動物体の移動方向を取得するとともに、取得した移動方向と変化領域の長手方向とが一致しなかった場合に、人体判定装置2にて人体が動いたと判定するようにしている。これにより、人体を検出するために使用される撮影装置1によって住宅内の床面が真上から撮影されるので、人体やペットが移動する際に撮影装置1に近付いたり遠ざかったりすることがなくなり、人体やペットの移動方向を確実に得ることができるとともに、移動領域の長手方向を確実に得ることができる。従って、人体とペットとをより確実に区別することができる。
(もっと読む)
物体認識方法及び認識装置
【課題】魚眼画像に対し、射影変換や補正演算による画像の変換を行わず、魚眼画像の歪んだ画像をそのまま用いて物体の認識を行うことができるようにする。
【解決手段】物体の認識を行う対象魚眼画像110の歪みの方向にあわせて領域を分割し120、物体認識部130がそれぞれの領域毎に用意したデータベース140を用いて物体認識を行う。また、対象魚眼画像100に回転処理を施した複数の対象魚眼画像に対しても同様の処理を行い、検出座標変換部150が得られた物体位置を逆回転により元の位置に戻し、得られた結果を検出結果として出力する。これにより、物体認識の検出精度の向上、データベースのデータ量の削減が可能となる。また、魚眼画像に対する物体認識のためのデータベース作成には、データベース作成に必要となる物体画像を回転させたものを利用する。
(もっと読む)
41 - 60 / 1,263
[ Back to top ]