
Fターム[5B057AA19]の内容
Fターム[5B057AA19]に分類される特許
161 - 180 / 1,263
汚泥処理装置及び汚泥処理方法
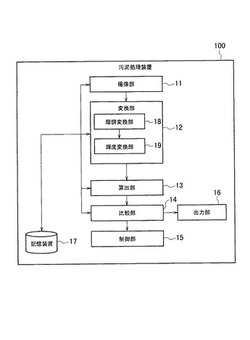
【課題】 汚泥原液中のフロックの凝集状態を撮影して、凝集剤の添加量及び凝集剤撹拌機の回転数を調整する汚泥処理装置及び汚泥処理方法を提供する。
【解決手段】 汚泥原液供給管33を通過する凝集フロックを撮像する撮像部11と、撮像部11が撮像した凝集フロックの画像を2値化し、2値画像を生成する変換部18と、変換部18が生成した2値画像に表示された凝集フロックの面積である凝集フロック測定面積及び予め設定した初期の凝集剤添加率に基づいて凝集フロック基準面積を算出する算出部13と、凝集フロック測定面積と凝集フロック基準面積とを比較する比較部14と、比較部14による比較結果に応じて、凝集剤供給ポンプ29及び凝集剤撹拌機21の回転数を制御する制御部15と、比較部14による比較結果に応じて、警報を発する出力部16とを備える。
(もっと読む)
監視システム、画像処理装置、及び監視方法

【課題】 監視対象体を含む映像信号を容易に高解像度化する。
【解決手段】 監視システムは、撮像装置10、画像処理装置20、及び受像装置30を具備する。撮像装置10は、監視対象体を撮影して映像信号Iを得る。画像処理装置20は撮像装置10に接続され、映像信号Iから、監視対象体を含むエリアを検出して、高解像度化処理部24によって検出されたエリアの映像信号を高解像度化処理して映像信号Oを生成する。受像装置30は画像処理装置20に接続され、映像信号Oを表示画面に表示、又は記憶装置に記憶する。
(もっと読む)
同一人判定装置、同一人判定方法および同一人判定プログラム
【課題】複数の画像データ中の人物が同一人であるか否かを少ない演算量で判定すること。
【解決手段】同一人判定装置100は、第1の画像に含まれる第1の人物の第1の部位が、撮像装置のレンズの焦点からみて存在していた第1の方向と、第1の画像に含まれる第1の人物の第2の部位が、撮像装置のレンズの焦点からみて存在していた第2の方向と、第2の画像に含まれる第2の人物の第1の部位が、撮像装置のレンズの焦点からみて存在していた第3の方向と、第2の画像に含まれる第2の人物の第2の部位が、撮像装置のレンズの焦点からみて存在していた第4の方向とを算出する方向算出部143と、第1の方向と第3の方向の交点と、第2の方向と第4の方向の交点を算出する交点算出部144と、交点の距離を算出する二点間距離算出部145と、距離が所定の範囲内であるか否かに基づいて、同一人であるか判定する同一人判定部142とを備える。
(もっと読む)
物体検出装置、物体検出方法及び物体検出プログラム
【課題】物体(人物)が比較的長い期間静止している場合でも、物体が背景モデルに同化することを抑制し、正確な物体の数の計数を可能とする。
【解決手段】物体検出処理部3では、固定カメラ1で撮影された入力画像と背景モデルとを、複数の画素からなるブロックに分割し、各ブロック毎に物体の輪郭に対応する物体領域を抽出する。また、この輪郭部分の内側の領域を埋めるように膨張処理を行うとともに、この膨張処理による物体領域の過剰検出を抑制する収縮処理を行う。荷重値テーブル生成部5は、物体の数に対する各画素の寄与率を表す荷重値を求めて荷重値テーブルを生成する。物体計数部6は、物体領域中の画素の荷重値を積算して物体の数を計数する。
(もっと読む)
画像データ処理装置およびコンピュータプログラム
【課題】 移動体の撮影画像の処理に対してPTV法を用いなくても合理的な画像処理をすることによって、的確な三次元表示を可能とする移動体画像データ処理を可能とする技術を提供する。
【解決手段】 複数台のカメラにて所定空間をステレオ撮影し、時系列に連続する左右の画像データに写った移動体を検出して三次元移動軌跡を解析するための装置である。 時系列に連続撮影された画像データを前記複数台のカメラから入力する画像入力手段と、 その画像入力手段に入力された画像データから画素を合成してカメラ毎に二次元軌跡画像を作成する二次元軌跡画像出力手段と、 カメラ毎に作成された二次元軌跡画像から三次元のボクセルデータを作成する三次元ボクセルデータ演算手段とを備えた移動体画像データ処理装置とする。
(もっと読む)
車両周辺監視装置
【課題】ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供する。
【解決手段】今回の制御周期における撮像画像と前回の制御周期における撮像画像間の位相相関関数を求めて、該位相相関関数を逆フーリエ変換した関数において実部の大きさが最大となる複素数要素の位置に基づいて、今回の制御周期での撮像画像の前回の制御周期での撮像画像からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値PYを算出するピッチング補正値算出部12と、今回の撮像画像に対して、ピッチング補正値PYによる位置補正を行った補正画像f3を生成する補正画像生成部13と、補正画像f3から対象物を検出する対象物検出部14とを備える。
(もっと読む)
パンタグラフ監視装置
【課題】列車の屋根上を撮影した画像を解析して、パンタグラフのホーンの折れの有無を検出することを可能としたパンタグラフ監視装置を提供する。
【解決手段】列車の屋根上を撮影する監視カメラと、監視カメラによって撮影された入力画像を画像処理することによりパンタグラフの状態を監視する画像処理装置とを備えたパンタグラフ監視装置において、画像処理装置が、入力画像上のホーンに対して設定される複数の検査点に基づいてパンタグラフのホーンを検査直線として抽出する検査直線設定部5hと、検査直線と予め設定する基準直線との間の検査角度を算出する検査角度計算部5iと、検査角度に基づいてホーンの折れの有無を判断するホーン折れ判断部5jとを備える構成とした。
(もっと読む)
移動物体追跡装置
【課題】監視空間内を移動する複数の移動物体が接近した場合に追跡対象の取り違えが起こる可能性がある。
【解決手段】監視空間を撮影した時系列の監視画像の任意時刻にて注目物体の像に対応する注目領域を設定する(S1)。注目領域から注目物体の像についての互いに異なる複数の注目特徴を抽出する(S2)。各時刻の監視画像から各注目特徴を有する特徴領域を検出し(S5)、注目特徴毎に、注目物体の位置に対応した特徴領域を追跡領域として設定し、それ以外の特徴領域をダミー領域として設定する(S6)。過去の特徴領域の位置に基づいて当該特徴領域の現時刻の移動先を予測する(S7)。予測された移動先に基づいて注目特徴毎に追跡領域とダミー領域との接近の発生を推定し、当該接近が生じないと推定された注目特徴の追跡領域の位置に基づいて注目物体の位置を判定する(S11)。
(もっと読む)
動線関連付け方法、装置及びプログラム
【課題】複数の動線認識システムでそれぞれ認識される動線のなかから同一移動体に対する動線どうしを関連付けられるようにする。
【解決手段】第1の動線データベースから第1の画像監視エリア内に位置した移動体の動線データを選択し、この動線データの移動体が第1の画像監視エリア内に位置する時点のカメラ画像データを第1の画像データベースから選択して、このカメラ画像データから移動体画像を抽出する。第2の動線データベースから第2の画像監視エリア内に位置する移動体の動線データを選択し、この動線データの移動体が第2の画像監視エリア内に位置する時点のカメラ画像データを第2の画像データベースから選択し、このカメラ画像データから移動体画像を抽出する。両移動体画像を照合して各画像の移動体が同一か判定し、同一であると判定されると、両動線データの関連付けを行う。
(もっと読む)
動線連結方法,装置及び動線連結プログラム
【課題】複数の動線認識システムでそれぞれ認識される動線のなかから同一移動体に対する動線を精度よく連結できるようにする。
【解決手段】第1の動線データベースに記憶された各動線データの中から第1の画像監視エリア内に位置する移動体の動線データを選択する。そしてこの動線データに対応する移動体が第1の画像監視エリア内に位置している期間のカメラ画像を表示させる。第2の動線データベースに記憶された各動線データの中から第2の画像監視エリア内に位置する移動体の動線データを選択する。そして、この動線データに対応する移動体が第2の画像監視エリア内に位置している期間のカメラ画像を表示させる。連結宣言を受け付けると、第1の動線データベースから選択された動線データの始点から第2の動線データベースから選択された動線データの終点までの動線データを生成する。
(もっと読む)
動線連結方法,装置及び動線連結プログラム
【課題】複数の動線認識システムでそれぞれ認識される動線のなかから同一人物に対する動線どうしを連結できるようにする。
【解決手段】連結元動線の終点が検出された時点のカメラ画像データを選択する。そして、この画像データを処理して人物画像を抽出する。連結先動線の始点が検出された時点のカメラ画像データを選択する。そして、この画像データを処理して人物画像を抽出する。各人物画像との同定処理を行う。そして、同一人物であることが確認されると、連結元動線に連結先動線を連結する。
(もっと読む)
二次元運動に基づいて相対的三次元速度及び加速度投射関数を推定するデータ・マイニング方法及びシステム
【課題】
【解決手段】 空間の第1の画像から空間の第2の画像にデータを変換するために使用される変換行列を決定する方法が開示される。この方法は、空間を監視するビデオカメラから画像データを受け取る段階であって、ビデオカメラは、空間内を運動するオブジェクトの画像データを生成する段階と、画像データからカメラの視野に対するオブジェクトの時空的位置を決定する段階とを含む。この方法は、更に、オブジェクトの時空的位置に基づいてカメラの視野に対するオブジェクトの運動の観察属性を決定する段階を含み、観察属性は、カメラの視野に対するオブジェクトの速度と、カメラの視野に対するオブジェクトの加速度の少なくとも一方を含む。この方法は、また、オブジェクトの運動の観察属性に基づいて変換行列を決定する段階を含む。
(もっと読む)
画像検査装置
【課題】対象物に印字される文字の品質率が低下することにより生じる無駄はねを低減しながらも、検査の質が低下することを回避できる画像検査装置を提供する。
【解決手段】画像検査装置1は、新たな辞書を辞書記憶部11に追加で登録する追加登録部16を備えている。追加登録部16は、判定部14で良品印字と判定された場合において、品質率が判定閾値よりも高く設定されている規定値を下回ったときに、撮像画像から抽出した文字部分の画像をこの文字に対応付けて辞書を作成する。追加登録部16は、作成した辞書を辞書記憶部11に追加で登録する。画像検査装置1は、追加された辞書を照合部13で用いるようにすれば、たとえ文字の品質率が徐々に低下しても、品質率が判定閾値以下となって判定部14が不良印字と判断することを回避できる。
(もっと読む)
車両周辺監視装置
【課題】微分フィルタによるフィルタ処理を行った場合に生じ得る弊害を抑制した車両周辺監視装置を提供する。
【解決手段】赤外線カメラ1により撮像された原画像Im1に対して、微分フィルタによるフィルタ処理を施するフィルタ処理部13と、外気温Tsが温度範囲Tw内であるとき及び原画像Im1の輝度分散Lvが閾値Lv_th以下であるときは、原画像Im1に対してフィルタ処理部13によりフィルタ処理を実施して、フィルタ処理後画像Im2から歩行者の画像を検知し、外気温Tsが温度範囲Twから外れ且つ原画像Im1の輝度分散Lvが閾値Lv_thを超えているときには、フィルタ処理を禁止して原画像Im1から歩行者の画像を検知する対象物検知部14とを備える。
(もっと読む)
車両監視装置
【課題】センタ装置及び路上装置のハード構成を複雑化することなく、センタ装置側において監視対象車両の映像を一時的に参照できるようにする。
【解決手段】通常時は、路上装置2−1〜2−Nからセンタ装置1に、車両情報及びナンバープレート情報を伝送する。センタ装置1から監視カメラ21の撮影映像の伝送が求められた場合は、路上装置2−1〜2−Nからセンタ装置1に、監視カメラ21の撮影映像を直接伝送し、センタ装置1に備えられた表示モニタ14に表示する。また、センタ装置1に備えられたデータ検索部11が、路上装置2−1〜2−Nから伝送された監視カメラ21の撮影映像から、ナンバープレート情報を読み出す。
(もっと読む)
監視プログラム及び監視装置
【課題】処理負荷を低減させつつ、既存のコンピュータ又はパーソナルコンピュータ等を用いて精度の高い監視を実現する監視プログラム及び監視装置を提供する。
【解決手段】本発明の監視装置は、撮影領域に監視ラインを設定する監視ライン設定部と、監視ラインの位置に対応する撮影領域の画像における画素を一列に配列した監視ライン画素データ列を生成する画像処理部と、所定の間隔で連続して撮影された監視領域の各画像における監視ライン画素データ列間の画素値の変化に基づいて撮影領域の画像変化を判定する監視部とを備え、監視部は、監視ライン画素データ列を所定数の画素群に分割し、監視ライン画素データ列間の画素群における画素値の変化に基づいて撮影領域の画像変化を判定するとともに、監視ライン画素データ列の配列順に分割される第1画素群及び第2画素群において第2画素群の少なくとも一部の画素に第1画素群の画素が含まれるように分割する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より簡単かつ迅速に、安定して被写体をトラッキングできるようにする。
【解決手段】平坦判定部51は、入力画像の各領域の画素の画素値の分散に基づいて、入力画像が平坦な画像であるか否かを判定する。トラッキング部52は、入力画像が平坦でない場合、入力画像のフレーム間の動きを検出することにより、入力画像から追尾対象の被写体を検出する。トラッキング部53は、入力画像が平坦である場合、入力画像から特徴の特徴量を抽出し、特徴量から入力画像の各領域における被写体らしさを示す被写体マップを生成し、被写体マップを用いて入力画像から追尾対象の被写体を検出する。このように、入力画像が平坦か否かに応じて異なるトラッキング方法で追尾対象の被写体を検出することで、より安定して被写体を追尾することができる。本発明は、撮像装置に適用することができる。
(もっと読む)
運転支援装置
【課題】カーナビゲーション装置を搭載していない車両であっても、交差点における一時停止を予測し、それを的確に報知することができるようにする。
【解決手段】車両制御部12は、車両に搭載したカメラユニット10で撮影した画像データに基づいて、交差点6を検出し、次いで当該交差点6に信号機3が有るか否か、停止標識4が有るか否か、停止線5が有るか否かを調べる。そして信号機3の信号灯色が赤色或いは黄色であり、或いは停止標識4が検出され、或いは停止線5が検出された場合であって、自車両1が停止線5に到達するまでの距離Lが注意報知距離L1以内で(L≦L1)、且つ車速Vが設定車速V1以上の場合、警報装置14から運転者に注意を促す警報を発生させる。
(もっと読む)
覚醒支援装置
【課題】覚醒支援装置において覚醒支援開始の要否判定の妥当性を向上させること。
【解決手段】第1候補の眠気度合いが閾値未満であると判定すると(S220YES)、算出された信頼度の値が予め定められた基準値以上かを判定する(S225)。信頼度の値が基準値以上であると判定すると(S225YES)、覚醒支援を開始することなく、作動処理を終える。一方、第1候補の信頼度の値が基準値未満であると判定すると(S225NO)、第2候補が覚醒寄りかを判定する(S230)。第2候補が覚醒寄りであると判定すると(S230YES)、覚醒支援を開始することなく、作動処理を終える。一方、第2候補が居眠り寄りであると判定すると(S230NO)、要否確認処理(A)を実行する(S235)。要否確認処理において、ユーザが覚醒支援開始を希望すれば、覚醒支援を開始する。
(もっと読む)
監視カメラ画像を用いた連動表示計測システム
【課題】段階的な手段をとらなくとも一目で監視カメラ画像、三次元画像、平面図画像上での指定個所をそれぞれの画像上で正確に直に提供できる単眼視の監視カメラ映像を用いた連動表示計測システムを得る。
【解決手段】カメラ選択部31と、モード判定部32と、画角設定部33と、表示処理部34と、カメラ画像指定個所連像表示部11と、GIS画像指定個所連動表示部12と、平面図指定個所連動表示部13等を備えて、対象範囲が数キロに亘る広範囲で撮影されたカメラ画像を三次元地形モデルに対応付けて、その監視カメラが撮影した三次元GIS画像並びに平面図画像を連動表示すると共に、いずれかの画像(カメラ画像、三次元GIS画像若しくは平面図画像)上の指定位置(カーソル)を各々の画像上に連動表示し、かつその指定位置の三次元座標を知らせる。
(もっと読む)
161 - 180 / 1,263
[ Back to top ]