
Fターム[5B057AA19]の内容
Fターム[5B057AA19]に分類される特許
1 - 20 / 1,263
開閉眼検出装置
電子情報提供システム及び電子情報提供方法
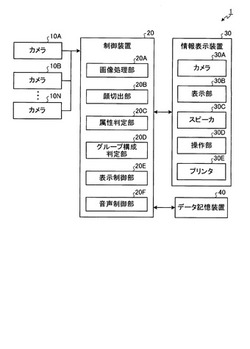
【課題】人物を撮像した画像から該人物の属性を判定して情報を選択し、選択した情報を該人物によって閲覧されるように表示する。
【解決手段】人物を含む画像を撮像するカメラと、このカメラによって撮像された人物が移動する方向かつカメラから離れた位置に設置された情報表示装置と、カメラで撮像された画像を用いて人物の属性を判定して該属性に基づいて情報を選択すると共に、この人物が情報表示装置に到達する前に、選択した情報を情報表示装置に表示するよう制御する制御装置とによって電子情報提供システムを構成する。
(もっと読む)
待ち行列管理装置、待ち行列管理方法および、待ち行列管理システム

【課題】待ち行列を管理すること。
【解決手段】待ち行列管理装置によって、所定のサービスの提供を受けるための待ち行列が形成される領域の画像が取得され(ステップS111)、取得された画像に撮影されている待ち行列を形成しているそれぞれの人に発行された待ち行列の順番を特定可能な順番特定情報が、当該順番特定情報で特定される順番が対応している人をそれぞれ特定可能な態様で、当該画像に追加され(ステップS118)、順番特定情報が追加された画像が、端末装置に送信される(ステップS122)。
(もっと読む)
監視装置
【課題】 予め設定された特定状態(例えば、異常発生中状態)にある監視手段の状況を容易に確認することのできる監視装置を提供する。
【解決手段】 監視装置4は、監視手段(監視カメラ2や画像記録装置3)が設置された複数の監視領域を含む監視区画を遠隔から監視する。この監視装置4では、監視区画を表示する第一表示工程と、第一表示工程で表示された監視区画が選択されたときに当該選択された監視区画に含まれる監視領域を表示する第二表示工程と、第二表示工程で表示された監視領域が選択されたときに当該監視領域の平面図を表示する第三表示工程とが実行される。第二表示工程では、選択された監視区画内に特定状態の監視手段がある場合には、当該監視手段が設置された監視領域のみが選択可能に表示され、選択された監視区画内に特定状態の監視手段がない場合には、全ての監視領域が選択可能に表示される。
(もっと読む)
画像処理方法、画像処理装置及び画像処理プログラム
【課題】時間的、空間的な連続性を保ちつつ、誤検出を低減しながらも個人が特定できないようにして人物領域を検出する。
【解決手段】処理対象画像と、直前の処理により生成された背景画像と、分散値画像に基づき、背景画像と処理対象画像の各画素値を分散値画像に応じた重み付け和により背景画像を更新するステップと、処理対象画像に対して荷重平均フィルタを使用し低周波数成分画像を生成するステップと、処理対象画像と低周波数成分画像の差分から高周波数成分画像を生成するステップと、背景画像と処理対象画像との差異から人物領域候補を算出するステップと、高周波数成分画像の各画素の値を算出された人物領域候補の各画素の値を用いて抑制するステップと、抑制後の高周波数成分画像と低周波数成分画像を合成し結果画像を生成するステップと、結果画像を処理結果として出力するステップとを有する。
(もっと読む)
評価値算出装置及び評価値算出方法
【課題】移動方向が互いにことなる複数の移動体をセンシング対象とする場合でも、センサ設置位置を精度良く評価できる評価値算出装置及び評価値算出方法を提供すること。
【解決手段】評価値算出装置100において、評価値算出部104は、設置位置候補と、センサの、センシング対象(ここでは、移動体)の移動パラメータに対する精度特性と、センサのセンシング対象領域(ここでは、監視対象領域)における交通事象パターンとに基づいて、センシング対象領域を構成する複数の領域要素にそれぞれ対応する複数の要素単位精度劣化値を算出する。そして、交通事象パターンは、複数の領域要素と各領域要素を起点とする交通事象ベクトルとから構成される。
(もっと読む)
回転機ギャップ計測装置
【課題】画像処理により直接的にギャップを計測し、また、異常を検出した場合の保守作業員の目視による確認作業の手間を省くことを可能とする。
【解決手段】カメラ1で、照明器具2により照らされた回転機のギャップ14を撮影し、撮影した画像データは画像伝送器4によって電気信号から光信号に変換され、光ケーブル8を通り情報装置盤6内の画像伝送器5に送信される。送信された光信号は、画像伝送器5において電気信号に再び変換され、画像伝送器5から画像解析装置7に送信される。画像解析装置7では画像伝送器5から送信されてきた画像データを基にギャップ14の計測を行い、計測した情報はネットワーク13a経由で遠隔地にある監視装置13bへ送信される。これによって、監視装置13bにより確認することができる。
(もっと読む)
車両情報登録方法、車両情報登録装置、及び車両情報登録プログラム
【課題】車両のモデルチェンジに伴う照合情報の登録に係るシステム管理者等の負担を軽減する。
【解決手段】車両を撮像する撮像部から画像を取得し、前記画像から、車両名称を表すマークの形状に係る特徴量である車両名称特徴量と、車両の形状に係る特徴量である車両特徴量と、を抽出し、車両名称、車両名称特徴量、車両特徴量を含む標準車両情報を車両毎に記憶する記憶部から、前記画像から抽出された車両名称特徴量に対応する車両特徴量を前記記憶部から取得し、前記記憶部から取得された車両特徴量と前記画像から抽出された車両特徴量とを照合し、所定の条件を満たす場合に、前記記憶部から取得された車両名称と前記画像から抽出された車両特徴量とに基づいて、新規の標準車両情報を前記記憶部に記憶する、処理をコンピュータが実行する。
(もっと読む)
カメラ姿勢算出装置
【課題】複数台の監視カメラの監視空間が什器等が設置された建物内、或いは建物内の廊下などの場合、各カメラの姿勢を校正する基準物体を設置するスペースを確保できない。
【解決手段】自己及び相互の鉛直下を撮像可能に設置された2台のカメラ2a,2bのそれぞれの鉛直下にマーカー7a,7bを配置する。視線方向算出部30は、例えば、カメラ2aについて当該カメラで撮像した画像における自己マーカー7a及び他方カメラ鉛直下の相手マーカー7bの位置座標を用いて当該カメラから各マーカーへの視線方向を算出する。姿勢算出部31は、自己マーカーへの視線方向から得られる鉛直方向と、相手マーカーへの視線方向から得られるカメラ2a,2b間の方位とを用いて世界座標系における各カメラの姿勢を算出する。
(もっと読む)
画像処理装置及びプログラム
【課題】 軽微な演算量で画質劣化の少ない解像度変換を実行できる画像処理装置を提供する。
【解決手段】 入力画像毎に、出力画像となる領域と倍率を指定して解像度変換を行う画像処理装置に関する。この画像処理装置は、入力画像を、いずれかの固定倍率で高解像化可能な高解像化変換部と、高解像化で得られた中間画像を保持する中間画像記憶部と、中間画像を参照して解像度変換を施して出力画像を得る解像度変換部と、前記固定倍率の中から指定倍率に近い倍率を選択すると共に、選択倍率及び指定領域とに基づいて、高解像化変換処理の対象領域を算出して高解像化変換部を制御する高解像化制御部と、選択倍率と指定倍率との比を中間画像を出力画像に変換する際の倍率とすると共に、中間画像を出力画像に変換する際に必要となる基準的な位置情報である変換パラメータを算出して解像度変換部を制御する解像度変換制御部とを有する。
(もっと読む)
技能習得支援システム及び技能習得支援方法
【課題】模範者の動作に対する利用者の動作の差異を検出する技能習得支援システムにおいて、利用者の動作の評価を適正に行う。
【解決手段】模範者及び利用者の動作に係るデータを検出するセンサ5と、前記動作に係るデータを取得する動作データ取得手段7,10と、前記動作に係るデータを記録する記憶手段17と、前記模範者の動作に係る第1のグラフL1を形成すると共に、利用者の動作に係る第2のグラフL2を形成するグラフ化手段10と、前記第1、第2のグラフにおける所定の作業ポイントが時間軸上で一致するよう調整する作業ポイント一致手段10と、前記第1のグラフにおいて、前記利用者に対するデータ許容範囲Rを時系列に形成する許容範囲形成手段10と、前記第2のグラフにおいて、前記許容範囲形成手段が形成したデータ許容範囲を外れる区間を検出する相違箇所検出手段10とを備える。
(もっと読む)
物体数計測装置、物体数計測方法及び物体数計測プログラム
【課題】屋内・屋外に設置された単眼の監視カメラあるいは定点カメラを使って、撮影範囲内の物体数を物体が少ない場合でも精度よく計測することができる物体数計測装置を提供する。
【解決手段】画像中の物体の数を計測する物体数計測装置であって、画像の各画素の物体の数に対する寄与率を示す荷重値が定義された荷重値テーブルを記憶するテーブル記憶手段と、画像から物体が存在する領域を示す前景領域を抽出する前景抽出手段と、前景領域中の空間的に連続する部分前景領域を生成する部分前景領域生成手段と、生成された部分前景領域のそれぞれに含まれる各画素と荷重値テーブルから得られる当該画素の荷重値から物体の数を算出する部分物体数算出手段と、算出された各部分物体数から画像全体の物体数を算出する全体物体数算出手段とを備える。
(もっと読む)
被写体追尾装置およびカメラ
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
(もっと読む)
監視装置、プログラム
【課題】ベッドを基準にして監視すべき領域を自動的に検出することにより、監視対象の人の動作を正確かつ再現性よく検出することを可能にした監視装置を提供する。
【解決手段】距離画像センサ10は、画素値が物体までの距離値である距離画像を生成する。距離画像センサ10の視野領域には、監視対象であるベッドの全体を含む。ベッド認識部21は、距離画像センサ10が出力した距離画像を用いてベッドの位置を抽出する。人認識部22は、距離画像センサ10が出力した距離画像のうちベッド認識部21により認識したベッドの範囲内と範囲外とにおいて人が占有する領域を検出する。行動判定部23は、ベッド認識部21により検出したベッドと人認識部22により検出した人の領域との組み合わせによりベッドに対する人の動作を判別する。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】歪円形画像に撮像される撮像対象の把握性を向上させることができる画像処理装置、画像処理方法及び画像処理プログラム等を提供する。
【解決手段】魚眼画像を魚眼画像用モニタ2に表示可能な魚眼画像データに変換し、所定の位置を基準とした所定の範囲内の魚眼画像を、平面正則画像用モニタ3に二次元的に視認可能に表示する平面正則画像データに歪補正し、魚眼画像データ又は、平面正則画像データを、選択的に出力する。
(もっと読む)
3次元形状データ処理方法、3次元形状データ処理装置
【課題】3次元形状に対応するデータファイルのサイズを小さく、転送や取り扱いを容易とする。
【解決手段】レーザ光200の走査によって構成される面(走査面)と3次元形状をもつ対象物300との交線上に、各測定点は離散的に存在する。この3次元形状データ処理方法においては、データとして、3次元空間座標の点群データの代わりに、各走査面上における各測定点の平均位置Gnの空間的位置、走査面における座標軸Un、Vn軸の方向、各測定点Pn,i(1≦i≦k)についての、走査面での2次元座標(un,i、vn,i)を記録する。ただし、この2次元座標を記録する代わりに、後述する符号化された値を記録することもできる。
(もっと読む)
危険検知装置及び危険検知方法
【課題】危険な状態を短時間で、かつ精度よく検知することが可能な危険検知装置を提供する。
【解決手段】位置情報取得手段101は、人物の身体上部の一点である計測点の位置情報を取得する。移動ベクトル算出手段102は、位置情報の変化を示す移動ベクトルを算出する。下降検出手段103は、移動ベクトルの垂直方向成分である垂直移動データに基づいて計測点の下降を検出する。反転検出手段104は、移動ベクトルの水平方向成分である水平移動データに基づいて計測点の反転を検出する。危険状態判定部105は、下降検出手段103が下降を検出し、かつ水平移動ベクトル反転検出手段104が反転を検出したとき、危険状態と判定する。出力部106は、危険状態判定部の判定結果に応じて危険情報を出力する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】対象物体の追尾を適切に打ち切る。
【解決手段】消失領域設定部602は、撮像部601により撮像された画像データに対して領域を設定する。物体追尾部603は、画像データ内における対象物体を追尾し、対象物体が前記領域内に入った場合、対象物体の追尾を停止する。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
対象物種別判定装置
【課題】対象物の種別判定に要する演算負荷の軽減及び種別判定時間の短縮を図ることができる対象物種別判定装置を提供する。
【解決手段】赤外線カメラ2Rにより撮像された撮像画像から対象物の対象物領域Rを抽出し、対象物領域R内の運動判断領域Pについての輝度プロファイルJnを作成する(STEP106)。現在よりΔT前に作成した輝度プロファイルJoをメモリから読出し、Jn,Joの特徴量の差異が所定値以上であるか否かを判定する。所定値以上の差異があれば、対象物は生体(例:歩行者)であると判定し(STEP110)、なければ、現在よりΔT/2前に作成した輝度プロファイルJhをメモリから読出し、Jn,Jhの特徴量の差異が所定値以上であるか否かを判定し、所定値以上の差異があれば、対象物は生体であると判定し、なければ、対象物は生体でないと判定する。
(もっと読む)
1 - 20 / 1,263
[ Back to top ]