
Fターム[5B057BA30]の内容
画像処理 (340,757) | 入力部 (15,110) | 信号処理 (1,260) | 量子化(2値化、A/D変換) (1,220) | 閾値の制御 (172)
Fターム[5B057BA30]に分類される特許
1 - 20 / 172
ステレオ画像生成装置、ステレオ画像生成方法及びステレオ画像生成用コンピュータプログラム
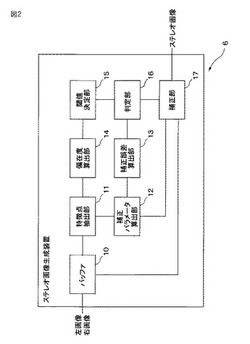
【課題】各カメラによる画像上で特徴点が偏在している場合に算出された補正パラメータが適切か否かを判断可能なステレオ画像生成装置を提供する。
【解決手段】ステレオ画像生成装置は、被写体が写った第1及び第2の画像から抽出された被写体上の同一の点に対応する複数の特徴点の組に基づいて補正パラメータを算出する補正パラメータ算出部12と、各特徴点の組について補正パラメータを用いて少なくとも一方の画像上の特徴点の位置を補正して、補正後の特徴点間の距離を求めることで補正誤差量を算出する補正誤差算出部13と、特徴点の偏在度を求める偏在度算出部14と、偏在度が大きいほど補正誤差量に対する閾値を小さくするようにその閾値を決定する閾値決定部15と、補正誤差量が閾値以下である場合に補正パラメータを用いて第1及び第2の画像のうちの少なくとも一方における被写体の位置を補正する補正部17とを有する。
(もっと読む)
加工面欠陥判定方法及び加工面品質検査方法

【課題】加工面の鋳巣の寸法計測に役立つ鋳巣の範囲を精度よく判定できる加工面欠陥判定方法及び信頼性の高い加工面品質検査方法を提供する。
【解決手段】2値化、輝度傾き抽出の処理ステップ102,103で加工面の原画像の2値化画像、輝度傾き抽出画像を得る。両画像を重ね合わせ処理ステップ105で重ね合わせて作成した欠陥検出用画像から鋳巣判定処理ステップで加工面の鋳巣の範囲を判定する。鋳巣判定処理ステップ106では、2値化画像中の鋳巣部分が拡大処理された2値化画像と輝度傾き抽出画像との論理積をとり、得られた鋳巣〔輝度傾き抽出画像における鋳巣(エッジの範囲)〕の範囲を判定結果として、2値化処理の閾値の高低に拘わらず精度のよい鋳巣範囲の判定を可能とした。同欠陥判定方法を品質検査方法に適用した。
(もっと読む)
二値化しきい値決定装置及び方法並びにプログラム
【課題】対象領域の濃淡値の分散と背景の濃淡値の分散が極端に異なる場合でも、適切な二値化しきい値を得る。
【解決手段】多値画像における各画素の濃度値から濃度ヒストグラムを作成するとともに、多値画像における各画素の濃度平均値を算出する。さらに、濃度平均値を各画素の濃度中央値に変換するための濃度変換パラメータを求める。そして、濃度変換パラメータに基づいて前記濃度ヒストグラムの濃度値を補正し、この補正された濃度ヒストグラムから仮のしきい値を選定する。しかる後、仮のしきい値を濃度変換パラメータに基づいて逆補正して、各画素を二値化するためのしきい値を決定する。
(もっと読む)
画像処理装置、撮像システム、画像処理システム
【課題】デジタル画像を利用した検体観察において、検体の奥行き方向の情報を維持し、且つコンピュータによる画像解析処理に適した画像を生成するための技術を提供する。
【解決手段】画像処理装置が、構造物を含む検体を焦点位置を変えながら撮像することにより得られた複数の原画像を取得する画像取得手段と、前記複数の原画像をもとに、原画像よりも構造物の像のボケが低減された第1の画像を生成する画像生成手段と、前記第1の画像に対し画像解析処理を適用することによって、前記第1の画像に含まれる構造物に関する情報を取得する解析手段と、を備える。前記画像生成手段は、前記検体から得られた前記複数の原画像の内から、前記検体の厚さよりも小さい深度範囲内に焦点位置が含まれる原画像を選択し、前記選択された原画像を用いて前記第1の画像を生成する。
(もっと読む)
画像読取装置、画像読取方法、プログラムおよび記録媒体
【課題】画像読取装置のコストを抑えつつ、さまざまな白色度の用紙に対しても、光沢の違いで作られたパターンを高い精度で抽出できるようにする。
【解決手段】画像読取装置は、規定の読取条件で照明手段および移動手段を制御して、用紙200の第1の領域200aの輝度画像データを得て、第1の領域200aの輝度画像データの度数分布を生成する度数分布生成手段と、パターン200dを含む用紙200において第1の領域200aの副走査方向下流に位置した第2の領域200bの読取条件を、度数分布を用いて決定する読取条件決定手段と、読取条件決定手段によって決定された読取条件で、照明手段および移動手段の少なくとも一方を制御して、第2の領域200bの前記輝度画像データを得る第2の領域読取手段と、第2の領域200bの輝度画像データからパターン200dを抽出する抽出手段と、を備える。
(もっと読む)
超音波診断装置及び超音波画像処理装置
【課題】ボリュームデータを用いて計測精度の高いNT計測を実現することができる超音波診断装置及び超音波画像処理装置を提供すること。
【解決手段】胎児の少なくとも一部を含む三次元領域を超音波で走査することでボリュームデータを取得するボリュームデータ取得ユニットと、前記ボリュームデータを用いて生成された、前記胎児のNT領域を含む所定の矢状断面に対応する画像を基準として、前記ボリュームデータのうち前記NT領域に対応するNTデータと、前記NT領域の長手方向と、を検出する検出ユニットと、前記NTデータと前記長手方向を基準とする視線方向とを用いて、前記NT領域の複数の位置に関する厚さを計測する計測ユニットと、前記NTデータと前記視線方向とを用いて、前記NT領域の厚さの分布を示す画像を生成する画像生成ユニットと、前記NT領域の複数の厚さのうちの少なくとも一つと前記画像とを表示する表示ユニットと、を具備する超音波診断装置である。
(もっと読む)
二値化処理方法及び画像処理装置
【課題】
照明環境が変動しても、背景の輝度が常に規定の輝度に制御された画像を得ることができるとともに、前記画像は背景とワークとのコントラストが高い状態とすることができるので、二値化により背景とワークを安定的に分離できる二値化処理方法及び画像処理装置を提供する。
【解決手段】
S20では、所定シャッタ時間で撮像された撮像画像における背景領域における背景基準計測点の現在の輝度を取得する。S30では、背景基準計測点の現在の輝度、目標背景輝度、定数を使用して、本撮影のシャッタ時間を算出する。S40では、算出した本撮影のシャッタ時間でカメラによりワーク台、載置板及びワークを撮像する。S50では、S40で取得した撮像画像を予め準備段階で設定した二値化閾値で二値化する。
(もっと読む)
監視装置、及び監視システム
【課題】今後の普及が見込まれるIPカメラ、ネットワークカメラを用いた監視カメラにおいてはデータサイズが増大するため、ネットワーク負荷の低減が必要である。また、撮像された人物における異常行動の検出漏れを低減する必要がある。
【解決手段】異常を検出する閾値を設けて、異常行動を検出した映像データだけを監視カメラから異常監視装置に伝送する。その際、閾値に近い行動、例えば異常行動の前兆となる行動をも検知することが望ましい。このため、撮像された画像から特定の人物を認識して異常行動の判定を行い、前記人物の異常行動判定の数値が、異常と判断する閾値から一定の範囲内となる状態を所定の回数重ねた場合、異常判定の閾値を変更する。
(もっと読む)
表面外観検査装置
【課題】検査対象物の表面において濃淡ばらつきと欠陥とが混在する場合であっても、欠陥のみを確実に検出することができる表面外観検査装置を提供する。
【解決手段】表面外観検査装置100に、LEDマトリクス照明1と、CCDカメラ5と、画像処理ユニット6と、を備え、画像処理ユニット6が、基準調光設定値D1を、(1)式を用いて決定し、輝度閾値Lthを(2)式を用いて決定し、(7)式を満たさない場合には、半導体モールドパッケージ200に濃淡ばらつきがあると判断し、画像をm×n個に分割して分割領域を生成し、分割領域毎の平均輝度階調値L1(m,n)meanに基づいて、分割領域毎に調光設定値D2(m,n)を決定し、LEDマトリクス照明1が分割領域毎の調光設定値D2(m,n)で照明光を出射し、CCDカメラ5によって生成された画像データに対して、輝度閾値Lthを用いて2値化処理を行うように構成した。
(もっと読む)
画像処理装置
【課題】印刷機種や経時変化により、印刷された地紋パターン(不正コピー禁止パターン)のドット径がばらついている場合でも、画像処理装置において地紋パターンを確実に検知できるようにする。
【解決手段】地紋検知処理部104は、読取り部102により読み取られた原稿画像データを入力して、該原稿画像データ内の地紋パターンを形成するドットを、該地紋パターンのドットとして認識可能なドット径に補正する。そして、このドット径の補正された原稿画像データについて、標準地紋パターンをマスクパターンとしてパターンマッチング法により地紋パターンを検出する。
(もっと読む)
車両周辺監視装置
【課題】グレースケール画像に対して微分フィルタによるフィルタ処理を実施してから、2値画像を生成したときに、対象物の画像の欠損が生じることを抑制した車両周辺監視装置を提供する。
【解決手段】レーザーレーダー8により検出された物体と車両との相対位置に基づいて、微分フィルタによるフィルタ処理が実施されたフィルタ処理後画像Im2内に、該物体の実空間における位置及び大きさに対応した位置及び大きさの処理対象領域を設定する処理対象領域設定部15と、フィルタ処理後画像Im2に対して、前記処理対象領域を、前記処理対象領域の設定対象となった物体と前記車両との距離が短いほど低い輝度値に設定された2値化閾値により2値化する処理を行って、2値画像を生成する2値画像生成部14とを備える。
(もっと読む)
測量データの分類方法、測量データの分類装置及び測量データを記録した記録媒体
【課題】短時間で、より精度良く地形を分類できる測量データの分類方法及び測量データを提供する。
【解決手段】真の分類結果が不明である全く新たなエリアにおいても、点群状の測量データを取得すれば、同じ地域特性に属する特徴量の閾値を用いて、サポートベクターマシンにより人手をかけることなく、迅速に建物や樹木の分類を行えることとなる。
(もっと読む)
画像処理回路及び画像形成装置
【課題】画像データの圧縮率向上を図る。
【解決手段】BTC圧縮部20Y〜20Kは、各色の入力データを複数のブロックに分割したブロック毎に、ブロック内での最小値及び最大値に基づいて、当該ブロックに属する入力データを階調データ(0〜7)に分類し、当該分類された階調データ、最小値データ及び最大値データを出力する。差分データ生成部30Y〜30Kは、階調データ、最小値データ、最大値データのそれぞれについて、一つ前のデータとの差分データを生成する。データ連結部40は、YMCK4色分の階調差分データについて、同一位置のデータ同士をビット連結し、YMCK4色分の最小値差分データ、最大値差分データのそれぞれについて、同一ブロックのデータ同士をビット連結する。ハフマン符号化部50は、データ連結部40によりビット連結された画像データに対し、ハフマン符号化処理を行う。
(もっと読む)
白線認識装置
【課題】白線を正しく認識できる白線認識装置1を提供すること。
【解決手段】自車両の前方の道路を含む領域の画像を撮影する撮影手段3と、前記画像における道路の領域の輝度を検出する輝度検出手段7と、前記輝度検出手段7で検出した輝度と閾値との対比結果に基づき、前記画像における道路の白線を認識する白線認識手段7と、前記白線認識手段7により認識された白線内における輝度に基づき、前記閾値を再設定する閾値再設定手段7と、を備えることを特徴とする白線認識装置1。
(もっと読む)
誤差拡散処理回路及び逐次処理回路
【課題】多値画像データに含まれる色成分の数が増加しても、従来技術に比較して画像処理装置の回路規模の増大を抑える。
【解決手段】切換制御回路7は、色分離回路8から出力される処理対象の画素データD8の色成分を表す切換制御信号S7を発生する。しきい値テーブルメモリ3は、画素データD8の色成分に対応するしきい値データを量子化回路10に出力する。主走査誤差算出回路9は、切換制御信号S7に基づいて、画素データD8の色成分に対応する誤差拡散係数及び量子化回路10からの誤差データD10eに基づいて累積誤差データD9aを算出して画素データD8に加算することにより補正後データD9を算出する。量子化回路10は、しきい値テーブルメモリ3からのしきい値データを用いて、補正後データD9を量子化データD10qに量子化するとともに量子化誤差データD10eを算出する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理用プログラム
【課題】高精度にカメラ移動の検出を可能とする。
【解決手段】移動可能なカメラにより撮像された画像における1フレーム中のm×m(m:2以上の整数)画素を1ブロックとして、時間的に前後のフレームにおける対応する複数のブロックについてそれぞれの輝度データによる行列を前後のフレーム分作成する行列作成手段21と、前記対応する行列を用いて共分散行列を生成する生成手段22と、前記共分散行列から固有値及び固有ベクトルを求め、固有値及び固有ベクトルに基づき前後のフレームの対応する各ブロック間のユークリッド距離を求める演算手段23と、ユークリッド距離と閾値とを比較して比較値を検出する検出手段24と、前記検出手段による検出結果に基づき前記カメラの移動を判定する判定手段25とを具備する。
(もっと読む)
画像処理装置および画像処理方法
【課題】 階調変換処理における画素生成の遅延と細線の再現性を改善する。
【解決手段】 データ補正部104は、注目画素の入力画像データに、注目画素の周辺画素の誤差データから算出された注目画素に対する拡散誤差積算値を加算する。量子化部105は、拡散誤差積算値が加算された画像データを、量子化閾値を用いて量子化する。加算器106は、量子化の結果と、拡散誤差積算値が加算された画像データから、注目画素の誤差データを算出する。閾値制御部102と閾値設定部103は、注目画素の入力画像データに応じた量子化結果を有する、注目画素の周辺画素を検出し、検出された周辺画素に応じた範囲内の周辺画素の入力画像データと量子化結果の誤差データの加算値を求め、加算値に応じて注目画素に対する量子化閾値を設定する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】入力された画像に主被写体が含まれているか否かに関わらず、鮮やかなシーンを含む画像に対して適切な画像処理を施すことができるようにする。
【解決手段】彩度算出部111は、色差信号(R−Y,B−Y)からブロック毎の彩度(Chroma)を算出する。そして、シーン判別部113は、顔検出部114において検出した人物の顔領域を除外した残りのブロックから所定の閾値以上の彩度であるブロックの数を算出し、顔領域を除外した全ブロック数に対する所定の閾値以上の彩度である高彩度ブロック割合を算出する。そして、平均彩度及び高彩度ブロック割合が所定値以上である場合に鮮やかなシーンと判別する。このとき、過去に鮮やかなシーンと判別している場合は、高彩度ブロック割合の基準となる閾値を小さくし、そうでない場合は、閾値を大きくする。
(もっと読む)
赤目オブジェクト候補を分類する方法、コンピューター読み取り可能な媒体および画像処理装置
【課題】デジタル画像における赤目オブジェクトのブーストベースの枠組みを用いた自動分類方法を提供する。
【解決手段】赤目オブジェクト候補を選択し、次いで赤目オブジェクト候補について検索スケールセットおよび目オブジェクトが存在し得る検索領域が決定される。次にアダブースト分類器を満足するサブウィンドウの数が決定される、この数は票で示される。次に、アダブースト分類器を満足するサブウィンドウの最大サイズが決定され、票が正規化された閾値と比較される。最後に、票が正規化された閾値より大きい場合、赤目オブジェクト候補は真の赤目オブジェクトに変換される。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、および、X線画像撮影装置
【課題】画像のランダムな場所に発生し、比較的幅が狭く、振幅の大きなスジ状の濃度ムラを除去することができるX線画像撮影装置を提供する。
【解決手段】画像処理装置は、撮影された被写体および第1の方向に延びるスジ状の濃度ムラを含む元画像に対して、第1の方向と直交する第2の方向にフィルタ処理を行って高周波成分が抽出された第1の画像を生成する第1のフィルタ処理部と、第1の画像に対して、第2の方向に閾値判定を行って閾値よりも小さい画素値の画素が除去された第2の画像を生成する閾値判定部と、第2の画像に対して、第1の方向にフィルタ処理を行って低周波成分が抽出された第3の画像を生成する第2のフィルタ処理部と、元画像から第3の画像を減算することにより、元画像に含まれるスジ状の濃度ムラが補正された補正後の画像を生成する減算部とを備えている。
(もっと読む)
1 - 20 / 172
[ Back to top ]