
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
21 - 40 / 1,659
レーザオルソ画像生成装置及びそのプログラム
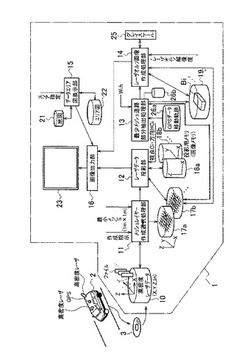
【課題】高密度のレーザデータを用いてオルソフォトと同様な画像を容易に得ることができるレーザオルソ画像作成装置を得る。
【解決手段】移動に伴って周囲に数センチ間隔でレーザデータを発射して得た高密度のレーザデータ(x、y、z、反射強度in、RGB値、発射時間、受信時間)を記憶したデータベース10と、メッシュレイヤ作成処理部11と、レーザデータ投影処理部12と、道路部分抽出処理部13と、レーザオルソ画像作成部14と、データエリア図表示部15等を備えて、画像メモリのピクセルに含まれるレーザデータを決定し、このレーザデータ群の中から所定のレーザデータの反射強度に基づく色(グレースケール等)をそのピクセルに付与し、道路面を鉛直からみたレーザオルソ画像を作成する。また、道路面のレーザオルソ画像においては、道路部分以外の点を除去する。
(もっと読む)
車両周辺監視装置

【課題】俯瞰画像上で全体が表示されていない目標物に対し、俯瞰画像上の境界線を変更し全体を表示できるようにした車両周辺監視装置を提供すること。
【解決手段】複数の撮像装置が互いに共通する視野領域とする俯瞰画像の共通領域に位置する障害物と判定された画像から抽出された複数の特徴点に対し、三次元計測処理部43において得られた相対運動情報による一定の経過時間を想定したときの予想軌跡と時刻変化をもとに、前記共通領域を互いに共通する視野領域とする各カメラについて“前記特徴点が写る/写らない”を予測しその予測結果を得る。そして、前記予測結果から、前記俯瞰画像の共通領域について、前記特徴点が抽出された障害物131をより広範囲に写すことの可能なカメラによる部分俯瞰画像を優先させ、フィードフォワード的に俯瞰画像の繋ぎ目、境界線を変更し、障害物131がより広範囲に俯瞰画像に表示されるようにする。
(もっと読む)
画像処理装置
【課題】表示操作や画像処理を撮影時の撮影情報および表示パラメータに基いて複数の画像を同期させて表示でき、画像の比較を容易にし、経時変化や治療効果の確認も容易であって、また、診察や診断の援助となる医療情報の提供が可能な画像処理装置を提供することである。
【解決手段】複数のレンダリング画像の画像処理が可能な画像処理装置において、所定操作にて複数のレンダリング画像の三次元的な観察角度を互いに同期させて表示するための表示同期手段と、この表示同期手段によるレンダリング画像の同期した表示は前記所定操作が解除されるまで持続させるための同期状態持続手段とを備えた。
(もっと読む)
施工補助装置、施工補助方法
【課題】建築物の施工、解体、デザインの製作など、幅広い意味での施工を必要とする施工領域における面積を簡便に算出すると共に、必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、必要となる機器の種類や大きさなどを推測できる、施工補助装置を提供する。
【解決手段】施工補助装置は、施工対象物100の画像に基づいて、施工対象物100の所定領域の面積を算出する面積算出手段と、施工対象物100の周辺情報を記憶する第1記憶部と、施工対象物100の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出する算出手段と、を備える。
(もっと読む)
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法
【課題】高い精度で移動体を検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】特徴点抽出部103は、撮像画像の各画素の画素値に基づいて複数の特徴点を抽出する。候補点特定部104は、抽出された特徴点から車両の所定部位の候補点を1又は複数特定する。透視投影変換部105は、特定された候補点を、透視投影変換行列を用いて3次元座標空間に逆投影する。3次元モデル配置部106は、逆投影された候補点に整合させて3次元モデルを配置する。透視投影変換部105は、配置された3次元モデルを撮像画像に投影する。移動体検出部107は、撮像画像へ投影された3次元モデルにより画定される領域内に含まれる特徴点の数に基づいて、車両を検出する。
(もっと読む)
カラーフィルタ基板の欠陥検査方法
【課題】従来の標高計算は局所領域のミスマッチングによる誤差が生じ、精度の高い標高情報が得られず、多大な処理時間がかかるという問題点がある。
【解決手段】カラーフィルタ基板上の局所領域の標高をステレオ方式で算出し欠陥判定をする欠陥検査方法において、ステレオ画像の一方の撮像画像である基本画像から局所領域を検出する工程、ステレオ画像の他方の撮像画像であって局所領域を含む参照画像を取得する工程、局所領域を含むマッチング領域をステレオ画像から選定する工程、マッチング領域から基準マークとなる部位を選定する工程、局所領域を鮮明化する工程、鮮明化された局所領域の中心座標を求め、基準マークからの距離を算出する工程、基本画像と参照画像における局所領域間の視差を求める工程、局所領域の標高を算出する工程、とを含むことを特徴とするカラーフィルタ基板の欠陥検査方法。
(もっと読む)
3次元座標位置推定装置、その方法、そのプログラムおよび3次元座標推定システム、ならびに、カメラ較正情報生成装置
【課題】マーカを複数のカメラで撮影したそれぞれの画像からマーカの3次元座標位置を推定する3次元座標位置推定装置を提供する。
【解決手段】3次元座標位置推定装置1は、少なくとも30台以上のカメラによって撮影されたカメラ画像を入力する画像入力手段11と、カメラごとに、カメラ画像からマーカの2次元座標位置を検出する点光源(マーカ)検出手段12と、カメラパラメータに基づいて、全カメラ共通の座標系において、カメラごとに、点光源(マーカ)検出手段12で検出された2次元座標位置と、当該カメラの光学中心とを結ぶ直線式を算出する点光源(マーカ)方向算出手段13と、カメラごとの直線式との距離の総和が最小となる位置を、マーカの3次元座標位置として算出する距離最小位置算出手段14と、を備えることを特徴とする。
(もっと読む)
X線診断装置
【課題】2焦点管球のような複雑なシステムが不必要であって、視覚処理系に負担が少なく、かつ立体視可能な画像を発生することができるX線診断装置を提供すること。
【解決手段】本実施形態に係るX線診断装置は、X線を発生するX線発生部と、X線発生部から発生され、天板に載置された被検体を透過したX線を検出するX線検出部と、X線発生部とX線検出部とを移動可能に支持する支持機構と、支持機構を移動させる支持機構駆動部と、被検体に対する第1撮影位置と、第1撮影位置とは異なる第2撮影位置と、第1、第2撮影位置とは異なる透視位置とにX線検出部を移動させるために、支持機構駆動部を制御する移動制御部と、第1、第2撮影位置でのX線撮影にそれぞれ対応する第1、第2画像を発生し、透視位置でのX線透視により透視画像を発生し、第1、第2画像各々に透視画像を重畳させた第1、第2重畳画像を発生する画像発生部と、第1、第2重畳画像を表示する表示部と、を具備することを特徴とする。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】撮影中に撮像機器付属の画面で確認しながら立体感の調整を行ったとしても、別の画面で表示した場合に所望の立体感が得られない。
【解決手段】機器付属のプレビュー画面及び視環境画面の画面サイズ情報と視距離情報とを用いて、視環境の画面で表示される立体感と等しい立体感となるように機器付属のプレビュー画面に表示される立体画像を生成する。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、精度が高い距離情報を生成できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、基準画像における隣接画素間の色情報の差分絶対値が色情報閾値Tc以下であるか否かによって、隣接画素間でメッセージを伝搬できるか否かを判定するメッセージ伝搬制限判定部12と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部13と、メッセージの評価関数を計算する評価関数計算部14と、評価関数が最小となる距離を、距離情報として推定する距離推定部15とを備える。
(もっと読む)
3次元形状データ処理方法、3次元形状データ処理装置
【課題】3次元形状に対応するデータファイルのサイズを小さく、転送や取り扱いを容易とする。
【解決手段】レーザ光200の走査によって構成される面(走査面)と3次元形状をもつ対象物300との交線上に、各測定点は離散的に存在する。この3次元形状データ処理方法においては、データとして、3次元空間座標の点群データの代わりに、各走査面上における各測定点の平均位置Gnの空間的位置、走査面における座標軸Un、Vn軸の方向、各測定点Pn,i(1≦i≦k)についての、走査面での2次元座標(un,i、vn,i)を記録する。ただし、この2次元座標を記録する代わりに、後述する符号化された値を記録することもできる。
(もっと読む)
物体検出方法及び物体検出装置
【課題】演算コストがより低い物体検出装置を提供すること。
【解決手段】2つのカメラ2a、2bのそれぞれが撮像するカメラ画像2aR、2bRの視差に基づいて物体50を検出する物体検出装置100は、被撮像空間を通る仮想直線VL上の複数の検査点IP1〜IP5のうちの1つIP1に対応する画素を含む部分画像2aR1、2bR1をカメラ画像2aR、2bRから抽出する部分画像抽出部10と、同一の検査点IP1に対応するカメラ画像2aR、2bRの部分画像2aR1、2bR1同士の類似度に基づいて検査点IP1に関する評価値CGRAを決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体50の存否を判定する物体存否判定部12とを備える。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60に搭載される物体検出装置100は、2つのカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60が動いたときにショベル60の一部が到達可能な空間領域を通る。
(もっと読む)
画像処理装置
【課題】パターンマッチングの対象となる一対の画像データにおける空間周波数の偏差を抑制することで、適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、一対の画像データにおいて、各画素に予め設定されている色相の輝度を周囲の画素に基づいて合成する色合成部174と、一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部180と、を備える。こうして、空間周波数の偏差を抑制して適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
ライブ蛍光透視画像を用いた冠動脈モデルの非剛体2D/3Dレジストレーション
【課題】心臓インターベンション中の2D蛍光透視画像を用いたデジタル3D冠動脈モデルの非剛体レジストレーション方法を提供する。
【解決手段】冠動脈ツリーのデジタル化された3D中心線の表示を提供するステップ90と、前記3D中心線を、少なくとも2つの2D蛍光透視画像に、グローバル・アライメントするステップ91と、エネルギー汎関数を最小化することによって、前記3D中心線を、少なくとも2つの2D蛍光透視画像に、非剛体レジストレーションするステップ93と、を含み、前記エネルギー汎関数は、再構築された中心線点とレジストレーションされた中心線点との間の二乗差の総和と、二乗3Dレジストレーション・ベクトルの総和と、二乗微分係数3Dレジストレーション・ベクトルの総和と、心筋分岐エネルギーと、を含む。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60は、ショベル60の動作状態を検出する動作状態検出部65と物体検出装置100とを備える。物体検出装置100は、複数のカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。また、物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60の動作状態に応じて配置される。
(もっと読む)
基板検査装置及び検査方法
【課題】基板検査装置及び検査方法を提供すること。
【解決手段】検査方法は、測定対象物を撮影して測定対象物のピクセル別にイメージデータを取得し、測定対象物のピクセル別に高さデータを取得し、測定対象物のピクセル別にビジビリティデータを取得し、取得されたイメージデータと、ピクセル別の高さデータ、及びビジビリティデータのうちの少なくとも1つとを乗算して結果値を算出し、算出された結果値を利用してターミナル領域を設定すること、を含む。よって、より正確にターミナル領域を判別することができる。
(もっと読む)
ステレオマッチング処理装置、ステレオマッチング処理方法、及び、プログラム
【課題】ステレオ画像から、同一の点を撮像している対応点を求めて、視差を算出する際において、処理の高速化を図り得る、ステレオマッチング処理装置、ステレオマッチング処理方法、及び、プログラムを提供する。
【解決手段】ステレオマッチング処理装置100は、ステレオ画像の互いに対応点の組を特定し、組毎に視差を算出する視差算出部30と、ステレオ画像を分割する画像分割部40と、分割部分毎に、当該部分中に存在する対応点の組を特定し、これについて算出された視差の値に基づいて、当該部分の視差の最大値と最小値とを特定して視差探索範囲を設定する視差探索範囲設定部50と、分割部分毎に、対応点の組を新たに複数特定し、新たに特定した各組について、視差を算出し、その値が当該部分の視差探索範囲に収まる場合に、算出した視差を、当該部分における新たに特定した当該組の視差として出力する視差算出部60と、を備えている。
(もっと読む)
21 - 40 / 1,659
[ Back to top ]