
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
41 - 60 / 1,659
画像処理方法、画像処理装置およびプログラム
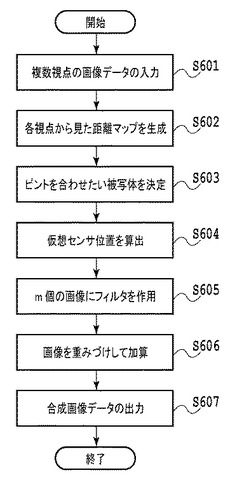
【課題】従来の方法では、光線追跡を行うため非常に重い処理となり、また、形状の推定を誤った場合、画質が劣化する要因となっていた。
【解決手段】複数の視点から撮像することにより得られた複数視点画像データを用いて合成画像データを生成する画像処理装置であって、被写体までの距離を示す距離情報に基づいて、前記複数視点画像データに対してフィルタ処理を行うフィルタ処理手段と、前記フィルタ処理がなされた複数視点画像データを合成して、合成画像データを生成する生成手段とを備えることを特徴とする。
(もっと読む)
画像診断支援システム

【課題】断層画像内に複数の領域を設定して、被験者及び特定グループに属する者の断層画像を比較し、被験者が所定の疾患であるか否かを鑑別するための支援をする。
【解決手段】
本発明の一つの態様に従う画像診断支援システムは、
被験者データ記憶部11と、健常者データ記憶部12と、断層画像内の複数の領域を示す領域データを記憶する領域データ記憶部20と、被験者の断層画像と健常者の断層画像とを比較し、複数の領域のそれぞれについて、被験者の断層画像が健常者の断層画像と異なる特徴を有する特徴領域であるか否かを判定する手段15,17,18と、疾患別の鑑別データを記憶する鑑別データ記憶部21と、判定結果と鑑別データとを比較するマッチング部19とを備える。
(もっと読む)
空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラム
【課題】空中写真画像データ同士の対応点を精度良く自動で設定することを可能にする空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラムを提供する。
【解決手段】第1空中写真画像データ及び第2空中写真画像データの共通特徴点の座標位置及び外部標定要素から三角測量の原理に基づいて共通特徴点の3次元空間における座標位置を算出し、このときの座標位置が第3空中写真画像データに投影される投影位置を算出し、投影位置を含む探索領域を第3空中写真画像データに設定し、探索領域に対して共通特徴点でパターンマッチングし、マッチング率が閾値以上で最も高いときの座標位置から投影位置までの誤差ベクトルを算出し、誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出し、誤差ベクトルが最頻誤差ベクトルとなる位置の投影位置に最頻誤差ベクトルを加えた位置を共通特徴点に対応する対応点に設定するようにした。
(もっと読む)
画像処理装置、画像処理方法、プログラムおよび画像処理システム
【課題】広画角で撮影された3次元画像を平面画像に射影する画像処理装置、画像処理方法、プログラムおよび画像処理システムを提供すること。
【解決手段】本発明の画像処理装置は、3次元画像データを2次元平面画像データに射影する。画像処理装置100は、位置座標および画素値を伴う3次元画像データを蓄積する記憶装置124と、次に作成するべき2次元平面画像データとするための拡大または縮小のためのズーム・パラメータを含む表示パラメータを取得する表示データ取得部104と、表示パラメータを使用して3次元画像データの一部から2次元平面画像データを作成するための位置座標変換部106および画素値マッピング部108と、作成された2次元平面データを2次元画像として表示するディスプレイ装置112とを備え、2次元画像データ作成のために使用する位置座標の逆変換手段を切り替えている。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
道路付属物検出装置、道路付属物検出方法、及びプログラム
【課題】道路標識やガードレールなどの道路付属物を高精度に自動的に検出する。
【解決手段】記憶装置6は検出対象とする道路付属物の画像特徴情報36及び、対象空間における検出対象の形状などに関する形態特徴情報38を予め格納する。画像分割手段20は対象空間を撮影した画像をそれぞれ類似する画素からなる複数の部分画像領域に分割する。候補画像領域抽出手段22は画像特徴情報36に基づいて、部分画像領域のうち検出対象に対応した候補画像領域を抽出する。壁面検出手段24は、対象空間の地物表面の三次元形状を表す点群データに基づいて地物の壁面を検出する。候補壁面抽出手段26は形態特徴情報38に基づいて、検出された壁面のうち検出対象に対応した候補壁面を抽出する。照合手段28は候補画像領域と、画像の撮影位置から見た候補壁面の投影像とを照合し、照合結果に基づいて検出対象を検出する。
(もっと読む)
画像処理装置およびその制御方法
【課題】 複数の視点から撮像した画像に基づいて、より広範囲における任意の被写体の位置情報を取得する。
【解決手段】 上記課題を解決するために、本発明の画像処理装置は、第一の画像と、前記第一の画像とは異なる視点から撮像した第二の画像とを取得する取得手段と、前記第一の画像および前記第二の画像それぞれにおける被写体の特徴点を検出する検出手段と、前記第一の画像および前記第二の画像に基づいて、前記被写体の位置情報を算出する算出手段とを有し、 前記算出手段は、前記第一の画像および前記第二の画像の両方において前記特徴点が検出された場合、前記特徴点それぞれに基づいて、前記位置情報および前記被写体に対応する被写体モデルを算出し、前記第一の画像および前記第二の画像のいずれかのみにおいて前記特徴点が検出された場合は、前記被写体モデルを参照して、前記情報を算出することを特徴とする。
(もっと読む)
車載用環境認識装置
【課題】より少ない処理負荷で周囲車両のヘッドライト光に起因した誤認識を防ぐことができる車載用環境認識装置を得ること。
【解決手段】車載用環境認識装置100は、画像から光源を抽出する光源抽出部300と、源の画像上の位置に基づいて光源が環境認識の際に誤検知要因となるライトを抽出し、ライトのライト強度と3次元位置と配光パターンの情報を含むライト情報を推定するライト情報部400と、ライト情報に基づいてライトが路面で反射する画像上の路面反射推定画像領域を推定する路面反射推定部500と、路面反射推定画像領域に基づいて自車両の周囲環境を認識する車載用環境認識部600と、を有する。
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
立体感提示装置および方法ならびにぼけ画像生成処理装置,方法およびプログラム
【課題】片眼でも立体感を得ることができる立体感提示装置を提供する。
【解決手段】間隔をおいて配置された2台のカメラから出力されるステレオ画像データを構成する左右の画像データに基づいて距離画像データを生成する距離画像生成手段53と,生成された距離画像データを用いて,上記の左または右の画像データに,距離に応じた焦点ぼけを与えてぼけ画像データを生成するぼけ画像生成手段55を備える。生成されたぼけ画像データに基づいて対象の焦点ぼけ画像を表示装置に表示する。
(もっと読む)
画像表示装置
【課題】診断用画像データと過去に収集された参照用画像データを比較表示する際、好適な参照用画像データを短時間かつ正確に検索することが可能な画像表示装置を提供する。
【解決手段】画像表示装置は、画像データにおける任意の領域を関心領域として設定する関心領域設定手段と、第1のラベル情報を前記関心領域に対して関連付けて入力することが可能となるように構成された第1のラベル情報入力手段と、前記関心領域の関心領域データと前記画像データを対応させて参照用画像データとして保存するデータ記憶手段と、前記第1のラベル情報に関連した第2のラベル情報を入力するための第2のラベル情報入力手段と、前記第2のラベル情報に対応する前記参照用画像データを抽出する参照用画像データ抽出手段と、前記抽出された前記参照用画像データを表示するための表示手段とを備えた。
(もっと読む)
医用画像作成表示装置およびプログラム
【課題】S-CPRを用いて血管等の管腔状組織の断面を表示させて読影を行うような場合に、実際よりも括れて表示されたり、途切れたように表示された場合においても、S-CPR画像を作成する際に管腔状組織の中心を通らない曲線を直線化したことによりそのような表示がなされているのか否かを容易に判別する。
【解決手段】外部操作装置2から、読影用画像表示の要求があったか否かの判断を行い(S11)、要求があった場合には、画像データ記憶部12に記憶された3次元医用画像データからS-CPR画像を作成し(S12)、作成画像記憶部13に格納する(S13)。次に3次元医用画像データからVR画像を作成し(S14)、作成画像記憶部13に格納する(S15)。作成画像記憶部13に格納されたS-CPR画像とVR画像は、画像表示部14の表示画面上に上下に並列されるように表示される(S16)。
(もっと読む)
超音波データ処理装置
【課題】トレースラインの形成においてユーザ操作を支援する装置を提供する。
【解決手段】マニュアルトレース用参照断面58内に設定されたトレースガイドTGが破線で示されている。トレースガイドTGは、既に完了した1枚目のマニュアルトレースに基づいた立体的な輪郭情報から得られる。そこで、ユーザは、2枚目のマニュアルトレース用参照断面58に対して、トレースガイドTGを参照しつつ、そのマニュアルトレース用参照断面58内の対象組織の断層画像を確認しながら、対象組織の輪郭に対応したトレースラインTLを描画する。ユーザは、トレースラインTLを全て描画してもよいし、トレースガイドTGの一部をそのままトレースラインTLとして残りの一部を修正してトレースラインTLとしてもよいし、トレースガイドTGをそのままトレースラインTLとしてもよい。
(もっと読む)
超音波データ処理装置
【課題】トレースラインの形成においてユーザが納得できる結果を得る。
【解決手段】複数の参照断面(マニュアルトレース用参照断面58と自動トレース用参照断面60)に対して平行になるように確認断面CSが設定され、複数の参照断面に対して平行になるように確認断面CSが移動され、各位置において対象組織42の最新の輪郭情報を二次元的に反映させた表示画像が形成される。確認断面CSを対象組織42の一端から他端まで移動させつつ、各移動位置において対象組織42の実際の輪郭と輪郭情報とに乖離が有るか否かをユーザが目視で確認する。その確認において乖離があると判断した場合には、その確認断面CSの位置において新たにマニュアルトレース用参照断面58を追加し、その断面に反映された輪郭情報をトレースガイドとしつつ、ユーザが正確なマニュアルトレースラインを形成する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】多彩なアレンジが可能な3D画像を生成すること。
【解決手段】3D画像取得部42は、左右の視差を有する3D画像データを取得する。遠景近景分離部44は、取得した3D画像データについての左右の画像のそれぞれから、遠景領域と近景領域を分離する。遠景絵画画像生成部45は、遠景近景分離部44により分離された左右の画像のそれぞれの遠景領域に絵画変換処理を施して、少なくとも1つの遠景絵画画像のデータを生成する。遠景絵画3D画像生成部46は、左右の画像のそれぞれについて、遠景絵画画像生成部45により生成された遠景絵画画像のデータと、分離手段により分離された近景領域についての近景部分画像のデータを合成することによって、遠景絵画3D画像データを生成する。
(もっと読む)
キャリブレーション装置及び歪み誤差算出方法
【課題】撮影画像内の周辺部において生じる歪み誤差を補正できる、キャリブレーション装置及びキャリブレーション方法を提供すること。
【解決手段】キャリブレーション装置100において、特徴点設定部110が、周期性を持って全体に配列された特徴点群が含まれたキャリブレーションボードがステレオカメラによって撮影されたボード画像内の画像内特徴点群の内から、設定ポイントが密に且つボード画像の中央部領域にのみ配置された第1パターン及び設定ポイントが疎に且つボード画像の全体に配置された第2パターンに基づいて、第1の画像内特徴点群セット及び第2の画像内特徴点群セットを設定する。誤差補正情報生成部130が、第1の画像内特徴点群セットに含まれた各画像内特徴点の座標と、第2の画像内特徴点群セットに含まれた各画像内特徴点の座標と、キャリブレーションパラメータとに基づいて、歪み誤差を算出する。
(もっと読む)
画像処理装置、画像処理方法及び撮像装置
【課題】ずれ量算出にかかる処理時間を短縮することのできる画像処理装置を提供する。
【解決手段】異なる位置から撮影され、複数の画素が2次元の行列状に配列された右眼画像PR及び左眼画像PLが格納されるメモリ51と、N行目の各画素に対応する切り出しブロックBRを右眼画像PRから切り出し、左眼画像PLの処理領域の全水平領域から比較ブロックBLを行方向に1画素ずつ移動させて切り出すメモリ制御部53を有する。また、切り出された各比較ブロックBLと切り出しブロックBRとを比較して輝度信号の差分絶対値和を算出するSAD演算部54と、各切り出しブロックBR毎に差分絶対値和の最小値に基づいてずれ量を算出する比較器55を有する。さらに、N+1行目の画素に対するずれ量算出処理の際に、N行目において算出された差分絶対値和に基づいて比較ブロックBLの処理領域内での移動範囲を絞るように設定する演算制御部56を有する。
(もっと読む)
画像処理装置、画像処理方法、撮像装置およびプログラム
【課題】多視点画像に対して色補間を行った後に、画像合成を行うと合成画像の鮮鋭性が低下してしまう。
【解決手段】多眼方式の撮像装置によって撮像された色補間前の多視点画像データを用いて合成画像を生成する画像処理装置であって、前記多視点画像データにおける画素値と画素位置の情報を取得する手段と、任意のフォーカス位置に応じた前記多視点画像データの各画素の画素位置の合成画像における画素位置を、前記撮像時の光学パラメータに基づいて決定する画素位置決定手段と、前記多視点画像データの各画素の色を導出する色導出手段と、前記決定された合成画像における画素位置及び前記導出された画素の色に対応する前記多視点画像データの画素値を用いて、前記合成画像の各画素の画素値を算出する画素値算出手段とを備えることを特徴とする。
(もっと読む)
3次元シーンの要素の奥行きを評価する装置
【課題】3次元シーンに分布した被写体要素(object element)の奥行きを評価するための有利な装置を提案すること。
【解決手段】装置は、光学系であって、それ自体が、複数の画素21、22、23を有する光センサ2、および光センサの画素の1つの上にシーンの要素E1、E2、E3を結像できるレンズ1を備える光学系と、この要素からきてビットマップ方式の光センサの画素のうちの1つによって取り込まれた光のストリームの最大値に着目することによって焦点を調整できるシーンの要素のいずれか1つに光学系の焦点を調整する手段と、この焦点の調節からこの要素の奥行きを推定するのに適した手段とを備える。
(もっと読む)
画像処理システム、装置、方法及びプログラム
【課題】立体感が最適となる立体視用の画像を表示すること。
【解決手段】実施形態の画像処理システムは、端末装置140の表示部142及び制御部145を備える。表示部142は、所定の視差数の視差画像を表示することで、観察者により立体的に認識される立体画像を表示する。制御部145は、所定の視差数の視差画像を3次元の医用画像データであるボリュームデータから生成する際に、被写体部分の形状に基づいて視差画像間の視差角を変更し、変更後の視差角となる所定の視差数の視差画像を表示部142に表示するように制御する。
(もっと読む)
41 - 60 / 1,659
[ Back to top ]