
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
101 - 120 / 1,659
立体映像生成装置及び立体映像生成方法
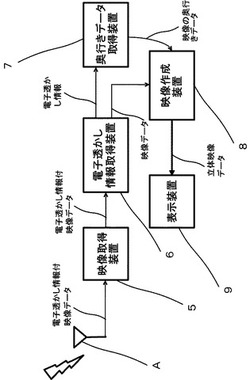
【課題】映像中に透かし情報として埋め込まれた奥行きデータをもとに立体映像を生成する方法および装置を提供する。
【解決手段】電子透かしを有する映像を取得する映像取得手段と、この映像から電子透かし情報を取得する情報取得手段と、取得した前記電子透かし情報から映像の奥行きデータを取得する奥行きデータ取得手段と、前記映像の奥行きデータから立体映像を作成する映像作成手段とを備えた立体映像生成装置。また、電子透かしを有する映像を取得し、この映像から電子透かし情報を取得し、取得された前記電子透かし情報から映像の奥行きデータを取得し、前記映像の奥行きデータから立体映像を作成する立体映像生成方法。
(もっと読む)
画像データに基づく医療画像の選択

【課題】画像データに基づく医療画像の一時的選択を実行するシステムを提供する。
【解決手段】心血管系の一部における画像を選択することによって心拍周期信号を導くシステムおよび方法は、ある期間で記録された複数の画像であって、スキャナから複数の画像を受信するステップを包含する。これらの画像は、心血管系の範囲に従う一つ以上の位置を表す。これらの画像は、次いで、外部信号を参照することなく、これらの複数の画像から判定された一般的な基準に基づいて選択される。この一般的な基準は、大動脈断面の大きさの変化、心臓体積の変化、心臓断面領域の変化を含む。さらに、この基準は、隣接する画像間の平均ピクセル差を含み得る。
(もっと読む)
平面視低電力モバイル装置における立体画像およびビデオのリアルタイム取得および生成
【課題】ステレオ・ビデオのリアルタイム取得および生成のための奥行き情報を検知しかつ推定するために低複雑性アプローチを使用する平面視低電力モバイル装置を提供する。
【解決手段】平面視低電力モバイル装置は、単一の取得視界からリアルタイム立体画像およびビデオを作成することができる。この装置は、単一の取得視界のブロック奥行きマップを作成するためにオートフォーカッシング・プロセスからの統計を使用する。ブロック奥行きマップにおけるアーテイファクトが低減され、また、画像奥行きマップが作成される。立体三次元の(3D)左・右視界が作成されるステレオ、Zバッファに基づく3D表面回復プロセスおよび両眼視覚の幾何学形状の関数である差マップを使用して画像奥行きマップから作成される。
(もっと読む)
奥行調整が可能な立体映像表示装置
【課題】 背景領域に過度に奥行範囲を割り当てることなく、手前側の奥行感が強調され、自然な奥行感を再現できる立体映像表示装置を提供する。
【解決手段】1実施形態の立体映像表示装置は、入力画像から奥行値を生成する奥行情報生成部11と、前記奥行値を調整し、調整された奥行値を生成する奥行調整部12と、前記入力画像及び前記調整された奥行値から、右視点用画像及び左視点用画像を生成する画像生成部と、前記右及び左視点用画像に基づいて、立体映像を表示する画像表示部14と、を備え、前記奥行調整部12は、各奥行値の頻度に対して、奥行値に応じた重み付けを行うことによって奥行値の重み付きヒストグラムを求め、該ヒストグラムから得られる重み付き累積ヒストグラムを用いて奥行値を調整することを特徴とする。
(もっと読む)
三次元点群位置データ処理装置、三次元点群位置データ処理方法、三次元点群位置データ処理システムおよびプログラム
【課題】三次元点群位置データの処理の途中経過を知ることができる技術を提供する。
【解決手段】三次元レーザースキャナが測定した三次元点群位置データ(S502)に基づき、解像度を段階的に変えた三次元モデルを作成する(S505)。この際、低解像度の三次元モデルの作成およびその表示(S506)、さらにその後に、ラベリングされたデータを引き継いで(S509)の高解像度の三次元モデルの作成およびその表示を行う。ここで、低解像度の三次元モデルの表示を行うことで、最終的な三次元モデルの完成の途中の段階をユーザが把握することができる。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】1つ以上の物体までの距離や表面反射率に関わらず、距離画像のほぼ全体にわたって良好な距離精度を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】発光部11と、反射光が戻るまでの時間から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、露出調節部13と、露出を段階的に変更しながら撮像した複数の距離画像において、同一の画素位置に対応する各画素の距離情報の重み付き平均値をそれぞれ算出するとともに、そうして算出された重み付き平均値を各画素の距離情報とするように合成した合成距離画像を求める演算制御部15とを備え、各画素は前記反射光の受光強度を示す受光レベル情報も有し、各画素の距離情報の重み付き平均値の算出では、その画素の前記受光レベル情報に応じて前記距離情報の精度に対応するように算出される重み付け係数が用いられる。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】正確に3次元座標を検出できるようにする。
【解決手段】取得部が、魚眼レンズを介して撮影した画像である魚眼画像を取得し、変換部が、魚眼画像を変換して、変換画像を生成し、認識部が、変換画像から認識対象の画像を認識する。本発明は画像処理装置に適用することができる。
(もっと読む)
医用画像処理装置および方法、並びにプログラム
【課題】3次元医用画像中の気管支のグラフ構造をより高い精度で構築する。
【解決手段】連続領域抽出部32が、気管支が表された3次元医用画像から、太い気管支内部の空気領域に対応する画素値を有する連続領域を抽出し、木構造構築部33が連続領域に対応する木構造を構築する。一方、線状構造抽出部34が、3次元医用画像中の各点の近傍の局所的な濃淡構造を解析することによって、細い気管支の断片を表す複数の線状構造を抽出する。木構造再構築部35は、太い気管支のグラフ構造を構成するノードと細い気管支の線状構造を表すノードを接続することによって、気管支全体を表すグラフ構造を再構築する。その際、太い気管支のノードと細い気管支の線状構造のノードとを結ぶ区間と、線状構造のノード同士を結ぶ区間とでは異なるコスト関数を用い、前者の区間におけるコスト関数は、画素値の変化が小さい区間ほど接続されやすくなるように定義した。
(もっと読む)
情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法
【課題】簡単な操作で種々の画像を表示することが可能な情報処理技術を提供する。
【解決手段】ゲーム装置は、実空間に配置されたマーカを撮像する。ゲーム装置は、撮像した画像に含まれるマーカに基づいて、ゲーム装置を基準としたマーカの位置および姿勢を算出するとともに、マーカ上にマーカ座標系を設定する。また、ゲーム装置は、ゲーム装置が備える加速度センサが検出した加速度に基づいて、重力方向を検出する。次に、ゲーム装置は、検出した重力方向に基づいて、マーカ座標系の重力方向を算出し、算出したマーカ座標系の重力方向に基づいて、仮想キャラクタの姿勢を決定する。そして、ゲーム装置は、当該仮想キャラクタを表示装置に表示する。
(もっと読む)
車両用画像処理装置
【課題】画像のダイナミックレンジが大きく、白線等の道路設置物や灯火を確実に検出可能な車両用画像処理装置を提供すること。
【解決手段】第1の撮像手段3と、第2の撮像手段5と、前記第1の撮像手段3及び前記第2の撮像手段5の露出制御を、道路設置物・灯火認識用露出制御と、立体物認識用露出制御との間で切り替える切り替え手段7と、前記第1の撮像手段3及び前記第2の撮像手段5により撮像された画像から前記道路設置物、灯火又は前記立体物を検出する検出手段7と、を備え、前記道路設置物・灯火認識用露出制御において、前記第1の撮像手段3の露出と、前記第2の撮像手段5の露出とが異なることを特徴とする車両用画像処理装置1。
(もっと読む)
画像処理システム、装置、方法及びプログラム
【課題】3次元の医用画像データから立体視用の画像を生成するために要する処理の負荷を軽減すること。
【解決手段】実施形態の画像処理システムは、ワークステーション130のレンダリング処理部136及び制御部135を備える。レンダリング処理部136は、3次元の医用画像データであるボリュームデータに対してレンダリング処理を行なう。制御部135は、端末装置140が有する立体表示モニタにて立体視するために必要となる視差数以上の視差画像群をボリュームデータから生成させるようにレンダリング処理部136を制御し、レンダリング処理部136が生成した視差画像群を画像保管装置120に格納するように制御する。端末装置140が有する立体表示モニタは、画像保管装置120に格納された視差画像群の中から視差数の視差画像を選択して構成される立体視画像を表示する。
(もっと読む)
ステレオ画像処理装置、ステレオ画像処理方法、及び、ステレオ画像処理プログラム
【課題】広角レンズを使用した場合でも、当該周辺部でも鮮鋭感がある優れた画像が得られるだけではなく、測距精度も高い技術を提供すること。
【解決手段】ステレオ画像処理装置は、撮影レンズ101、102および撮像素子103、104を備える2組の映像信号出力部と、信号処理回路105と、周辺解像補正回路106と、測距回路107を備えている。映像信号出力部からの映像信号は、信号処理回路105に出力される。信号処理回路105は、この映像信号に信号処理を行い周辺解像補正回路106に出力する。周辺解像補正回路106は、複数ある映像信号出力部のそれぞれに対応付けられて設けられており、映像信号出力部からの出力信号である映像信号に補正を加えて鮮鋭化する。測距回路107は、上述の映像信号補正部のそれぞれにより補正が加えられた複数の映像信号に基づいて、撮像内の各画素と被写体と距離を演算して測距値を求める。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】3D画像の最適な構図を検出することができるようにする。
【解決手段】最適視点検出部は、3以上の視点の画像と前記3以上の視点の視差画像を用いて、前記3以上の視点のうちの所定の2視点を最適な視点として検出する。本技術は、例えば、3D画像を撮影する撮影装置に適用することができる。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイス
【課題】目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイスを提供する。
【解決手段】目視される物体202の表面210の画像500を獲得して、表示するステップであって、画像500の複数のピクセル231、232、233、234は、目視される物体202上の複数の表面ポイント221、222、223、224に対応する、ステップと、複数の表面ポイントに対応する複数のピクセルの各ピクセルに関して、ピクセルに対応する表面ポイントに関する3次元座標が利用可能性であるかどうかを判定するステップと、ピクセル231に対応する表面ポイント221に関する3次元座標が利用可能でない各ピクセル231に関する第1のオーバーレイ250を表示するステップとを備える方法。
(もっと読む)
撮像装置
【課題】複数のカメラから仮想視点画像を生成する動画撮影系においてタイミングずらしの撮像を行うことでフレームレート性能を向上させる場合に画像間の対応点探索の誤りや動被写体の存在により推定精度が低下する。
【解決手段】複数の撮像部のうちの2つ以上が同時撮像を行うように撮像タイミングを制御し、複数の同時撮像された画像から撮像装置全体の動きを推定する。複数の撮像部によって同時撮像された画像と推定された動きとから仮想視点画像を合成する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】マルチフレーム合成による画質の低下の発生を未然に防止することのできる画像処理装置、画像処理方法およびプログラムを得る。
【解決手段】主制御部20により、各々異なる2つの視点からそれぞれ連続的に撮影された複数の画像を取得し、取得した複数の画像から前記視点毎に基準画像を決定し、当該基準画像を基準として前記複数の画像を当該視点毎に合成する一方、前記視点毎の基準画像間の対応点に関する第1立体画像関連情報と、合成した前記視点毎の合成画像間の対応点に関する第2立体画像関連情報との関係が、前記基準画像のほうが前記合成画像より立体視に適していることを示すものとして予め定められた条件を満足する場合に前記基準画像を前記視点毎に記録し、前記条件を満足しない場合に前記合成画像を前記視点毎に記録する。
(もっと読む)
監視装置及びプログラム
【課題】監視領域の撮影画像に基づいて監視を行う際、撮影画像の各画素について正確な三次元空間座標及び空間属性を保持するとともに常に最新の情報に更新することができる監視装置を提供する。
【解決手段】監視領域を連続撮影して得られた撮影画像の各画素に三次元座標により定まる位置を示す三次元空間座標を設定する設定手段(S103)と、撮影画像の各画素に該各画素が属する画像部位に対応する空間属性を付与すると共に、画像部位と隣接する画素の各々に画像部位との境界を示す空間属性を付与する付与手段(S113)と、境界を示す空間属性が付与された画素の各々から特徴量を繰り返し抽出する抽出手段(S117)と、抽出された特徴量の変化量が予め定められた閾値を超えた場合に、設定された三次元座標により定まる位置を示す三次元空間座標になるように前記画素の各々に設定された三次元空間座標を変更する変更手段(S129)と、を備えた。
(もっと読む)
情報処理装置、画像表示装置、および情報処理方法
【課題】ユーザにとって処理効率の向上を図る情報処理装置を提供する。
【解決手段】情報処理装置1は、表示装置10に表示する表示内容を生成し、両眼視差により観察者9が観視可能な立体画像を表示する立体画像表示装置である表示装置10に出力する。情報処理装置1は、位置情報入力部2により観察者9の位置情報を入力し、変化検出部3により位置情報の変化を検出する。切替部4は、観察者9の位置情報の変化の検出にもとづいて、付属情報表示の表示状態を、第1の表示状態から第1の表示状態に比較して観察者が観察容易な第2の表示状態に切り替える。表示出力部5は、主表示6、および主表示6に関する付属情報を表示する付属情報表示7、8を表示装置10に出力する。
(もっと読む)
視差算出装置、距離算出装置及び視差算出方法
【課題】二つの視点それぞれから得られた画像間の視差を算出する際、画像間の歪み又はずれの影響を抑え、精度の高い視差を簡易に算出する視差算出装置、距離算出装置及び視差算出方法を提供する。
【解決手段】視差算出装置100は、第一カメラ1から得られた基準画像及び第二カメラ2から参照画像を取得する。画像分割部101は、条件設定部102によって設定される分割条件に従い、基準画像及び参照画像それぞれを複数の領域に分割する。補正量決定部103は、分割された領域毎に画像ずれ量を算出し、その画像ずれ量に基づき補正量を決定する。視差算出部104は、補正量決定部103によって決定された補正量に基づいて画像分割部101から得られる分割基準画像及び分割参照画像の各領域に対して画像の補正を行い、補正後の画像に基づいて視差を求める。
(もっと読む)
101 - 120 / 1,659
[ Back to top ]