
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
141 - 160 / 1,659
グラフィックスプロセッサの並列アレイアーキテクチャ
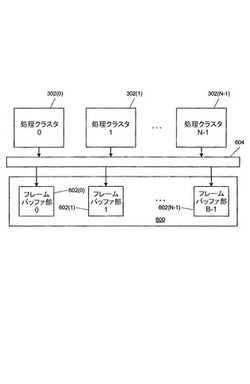
【課題】高い並列度を維持したままで、異なるシェーダーの変動する負荷に適応できるグラフィックスプロセッサを提供する。
【解決手段】グラフィックスプロセッサの並列アレイアーキテクチャは、複数の処理クラスタを含み、各処理クラスタがカバレッジデータから画素データを生成するピクセルシェーダープログラムを実行する少なくとも1個の処理コアを含む、マルチスレッド型コアアレイと、複数の画素のうちの1画素毎にカバレッジデータを生成するラスタライザと、ラスタライザからマルチスレッド型コアアレイ中の処理クラスタのうちの1つにカバレッジデータを配信する画素分配ロジックとを含む。画素分配ロジックは、画像エリアの範囲内の第1画素の位置に少なくとも部分的に依存して第1画素のためのカバレッジデータが配信される処理クラスタのうちの1つを選択する。画素データが処理クラスタから適切なフレームバッファ区画へ直接的に配信される。
(もっと読む)
医用画像処理装置

【課題】3次元データを2次元の投影画像に変換する際に、プラーク位置の判別を容易にして、投影方向のプラーク量やプラーク性状の判別も容易にすること。
【解決手段】医用画像処理装置は、被検体に関する3次元CTデータからCT値範囲に基づいて造影血流領域とプラーク領域を抽出する抽出部と、造影血流領域とプラーク領域を対象として血管/プラーク投影画像を発生する血管/プラーク投影画像発生部と、血管/プラーク投影画像上でプラーク領域に対応する範囲内の画素各々にはカラー値が割り当てられ、造影血流領域に対応する範囲内の画素各々には濃淡値が割り当てられる、造影血流領域に対するプラーク領域の位置を投影方向に関して手前側/奥側で判定する判定部と、血流/プラーク投影画像を投影画像に重ねて表示する表示部とを具備する。
(もっと読む)
画像処理装置、方法、プログラムおよび記録媒体
【課題】測距精度に影響する視差方向のパラメータのキャリブレーション精度を高め、ステレオカメラの測距精度を向上させる画像処理装置、方法、プログラムおよび記録媒体を提供すること。
【解決手段】本発明の画像処理装置は、ステレオカメラが撮影した撮影画像対を取得し、変換情報を使用して撮影画像対を平行化して、その対応点を探索する。そして、当該対応点を使用して撮影画像対の視差値を算出し、変換情報の較正が必要と判断した場合に、ステレオカメラを構成するカメラの回転ずれを考慮した変換情報に較正する。
(もっと読む)
タイルベースのグラフィックスシステム及びこのようなシステムの動作方法
【課題】複数のタイルを含むグラフィックスデータ生成のための、タイルベースのグラフィックスシステムと、その動作方法、及びグラフィックス処理回路が提供される。
【解決手段】処理回路は、第1及び第2動作モード間で切換えられる。第1モードで処理回路は、フレーム用のグラフィックスプリミティブを受け取り、ビニング動作を行う。これにより複数のタイルそれぞれについて、グラフィックスプリミティブのうちタイルと交差するものを特定するリストを決定する。第2モードで処理回路は、割り当てられたタイルのタイルリストを受信し、ラスタライゼーション動作を行う。この動作ではタイルリストに応じて、割り当てられたタイルについてグラフィックスデータを生成する。その結果、ビニング動作およびラスタライゼーション動作で同じ処理単位を使用でき、性能およびエネルギー消費を向上でき、グラフィックスシステムのサイズも大幅に低減する。
(もっと読む)
情報処理装置、コンピュータプログラム、および情報処理方法
【課題】 3次元図形を構成する複数の頂点に対応する複数の頂点データを有する3次元図形データに対する電子透かしなどの付加情報の埋め込みにおいて、データの改ざんが検出されやすくする。
【解決手段】 図形データ23における複数の頂点データのうちの少なくとも1つの頂点データについて、その頂点データにおける一座標の浮動小数点実数データの仮数部の一部に付加情報を埋め込み、その頂点データにおける別座標の浮動小数点実数データの仮数部の一部に、少なくともその仮数部の残りの部分と付加情報とから一方向性関数により得られる符号を埋め込む。
(もっと読む)
医療用データ処理装置およびそれを備えた診断装置
【課題】画像の視認性が損なわれないようにメディアンフィルタ処理を施すことにより視認性を向上させる上で邪魔となるノイズ成分を確実に除去することができる医療用データ処理装置を提供する。
【解決手段】本発明における画素の変換動作は、処理対象の画素とその周辺の画素とにおける画素値を比較して対象画素の画素値の順位を求め、この順位に応じて行ったり行わなかったりするのである。このように、本発明によればデータ処理を画素の全てについて行わないようにしている。これにより、空間データDa1が保持する被検体Mの像を劣化させることなく、空間データDa1のノイズを除去することができる。
(もっと読む)
画像処理方法、画像処理装置および表示装置
【課題】より高い精度で立体視画像の視差を推定する。
【解決手段】画像処理方法は、第1の画像の1または複数の画素である第1の画素と、第2の画像において上記第1の画素群に対応する位置にある1または複数の画素である第2の画素とについて、上記第1の画像と上記第2の画像との間のバックマッチングによって第1の指標値を算出するステップ(ステップS103)と、上記第1の画素と上記第2の画素との間の相関性を示す相関性指標値を、上記第1の画素によって示される画像の複雑度を示す複雑度指標値を用いて正規化することによって第2の指標値を算出するステップ(ステップS105)と、上記第1の指標値と上記第2の指標値とをかけ合わせることによって第3の指標値を算出するステップ(ステップS107)とを含む。
(もっと読む)
データ処理装置、データ処理方法およびプログラム
【課題】空間的な広がりを有するデータを、その特徴を適切に反映したデータに縮小できる、データ処理装置、データ処理方法およびプログラムを提供する。
【解決手段】n(n:2以上の自然数)次元のデータテーブルを読出し(ステップS102)、データテーブル上で第1次元方向のデータ配列毎に最頻値を求め(ステップS103)、第1次元方向を除くn−1次元方向のデータ配列毎に第1次元方向のデータ配列毎の最頻値の存在数を求め(ステップS104)、最頻値の存在数が最大となるn−1次元方向のデータ配列をデータテーブルから抽出する(ステップS106)。
(もっと読む)
超音波診断装置、検査装置および医用画像ネットワークシステム
【課題】多種の検査装置および多種の出力装置を接続したネットワークシステム内で、特定の検査装置で取得した医用画像を、出力装置を問わず、容易に安定した画質で出力可能とする。
【解決手段】従来の検査装置の構成に加え、外部出力画像生成部を備える。外部出力画像生成部において、当該検査装置で取得した画像を、出力先毎に、取得元の検査装置で得た画質と同等の画質を得られるよう画像処理を施して調整してから出力する。出力先毎の画像処理に用いる変換データは、検査装置側に保持する。
(もっと読む)
サムネイル抽出プログラム及びサムネイル抽出方法
【課題】3次元映像に適したサムネイルを抽出できるサムネイル抽出プログラム及びサムネイル抽出方法を提供することを課題とする。
【解決手段】3D映像の一フレームを構成するフレーム画像ペア間で対応する特徴点を特徴点ペアとしてフレーム画像ペアから抽出し、特徴点ペアの奥行き量を特徴点ペアの点間距離、レンズ間距離・焦点距離を基に算出して、奥行き量で前記特徴点ペアをクラスタリングし、予め定められたクラスタリングの結果情報に基づくフレーム画像ペアの立体的な見え易さの評価条件を基に、1以上のフレーム画像ペアのクラスタリングの結果情報から1以上のフレーム画像ペアの立体的な見え易さを評価し、立体的な見え易さの評価結果に基づき、評価結果の最も良い前記フレーム画像ペアを、サムネイル用の前記フレーム画像ペアとして抽出する処理をコンピュータに実行させるサムネイル抽出プログラムにより上記課題を解決する。
(もっと読む)
基板検査装置および基板検査システムならびに基板検査結果の確認用画面の表示方法
【課題】部品およびはんだに対する3次元計測結果に基づく検査の結果や検査対象部位の状態を、ユーザが容易に確認できるような表示を行い、検査結果の確認作業を支援する。
【解決手段】基板上の部品およびはんだに、それぞれ異なる手法の3次元計測を実施し、それぞれの計測により得た3次元情報をはんだ付け部毎および種別毎に読出可能に蓄積する。そして、これらの蓄積情報に基づき、はんだ付け部位毎に部品とはんだとの関係を表す画像を生成し、この画像を含む画面を検査結果の確認用の画面として表示する。好ましい確認用画面では、はんだの3次元情報が表す立体形状を部品のはんだへの接合面の近傍位置で切断した場合に得られるはんだの断面を正面として、このはんだの断面と部品との関係を示す画像(YZ図またはXZ図)が表示される。
(もっと読む)
画像処理装置及び画像処理方法
【課題】被写体を構成する層の正常構造を精度良く推定する仕組みを提供する。
【解決手段】被写体である眼部の眼底の断層画像から層を検出する層検出部221と、層検出部221で検出された層の形状に基づいて眼底の深さ方向に凸な曲線を求める正常構造推定部222と、層検出部221で検出された層と正常構造推定部222で求められた曲線との差異を定量化する定量化部223を具備する。
(もっと読む)
3次元データと2次元データの統合方法及びこれを用いた見守りシステム、監視システム
【課題】距離画像データ等の3次元データと2次元画像データとの対応付け、距離画像データと2次元画像データを相補的に用いることにより柔軟で信頼性の高い認識結果が得られる、3次元データと2次元画像データの統合方法およびそれを用いた頑健な監視・見守りシステムを提供する。
【解決手段】システムは、2次元データを取得する2次元データ取得ステップと、3次元データを取得する3次元データ取得ステップと、上記2次元データと前記3次元データの位置を対応付ける対応付けステップと、上記対応付けステップで対応付けた結果に基づいて上記3次元データを2次元データ上に重畳する重畳ステップとを備える。
(もっと読む)
診断用画像処理方法
【課題】 被検者の血管を含む3次元画像の画像データから容易に血管を抽出することが可能な診断用画像処理方法を提供する。
【解決手段】 被検者の血管の3次元画像の画像データを得る3次元画像撮影工程と、分散値が大きなガウシアンフィルタを適用することにより、その管径が大きな血管の3次元画像を抽出して除去する工程と、分散値が中程度のガウシアンフィルタを適用することにより、その管径が中程度の血管の3次元画像を抽出して除去する工程と、分散値が小さなガウシアンフィルタを適用することにより、その管径が小さな血管の3次元画像を抽出して除去する工程とを備える。
(もっと読む)
タイルベース・レンダリング・システムにおけるマルチコアの形状処理
【課題】多数のタイルベースの並列コアにわたるタイリング処理能力の向上。
【解決手段】多数の独立型タイルベース・グラフィック・コアを組み合わせるための方法及び装置が提供される。入ってくる形状ストリームは、複数のストリームに分割され、それぞれのタイルベースのグラフィックス処理コアに送られる。それぞれが別個のタイリングされた形状リストを生成する。これらは、マスター・タイリング・ユニットに組み合わせることができ、或いは代替的に、マーカーをタイリングされた形状リストに挿入することもでき、このマーカーがラスター化段階で用いられ、異なる形状処理コアからのタイリング・リスト間で切り替えを行なう。
(もっと読む)
3次元座標計測装置
【課題】精度良くセンサ座標系を世界座標系に変換する。
【解決手段】基準プレート50を世界座標系でキャリブレーションされた3次元絶対座標計測器60で計測して、世界座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。また、3次元座標計測ロボット10の3次元センサ部8を指令値に応じた位置に移動させ、基準プレート50にスリット光を投射して撮像し、撮像した画像からセンサ座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。世界座標系及びセンサ座標系の各々における基準点の3次元座標、法線ベクトル、及びエッジベクトルを用いて、センサ座標系を世界座標系に変換する変換パラメータを、指令値毎に算出する。
(もっと読む)
撮像装置
【課題】撮像された画像に対し、ボケを付加する。
【解決手段】光学系により結像した画像を撮像素子で撮像する。撮像素子は前記光学系の射出瞳上の異なる領域を通過した光束をそれぞれ受光して対の画像のデータを生成し、前記対の画像のデータを加算して合成画像を生成する画像合成手段を備え、前記画像処理手段は、前記合成画像に対して撮像画像におけるデフォーカス量分布を検出し、画像データに対してデフォーカス量分布に基づく処理を施す。
(もっと読む)
三次元データ処理装置、方法及びプログラム
【課題】三次元画像表示された対象物の視認性が向上する三次元データ処理技術を提供する。
【解決手段】三次元データ処理装置20は、対象物の表面に走査されたレーザの反射光を受光しその反射点の位置データの集合である点群データを生成する点群生成部21と、前記点群データ31の位置データにおけるピクセルの法線を導出する法線導出部22と、法線43に基づいてピクセルの輝度を演算する輝度演算部23と、ピクセルの前記位置データ及び前記輝度に基づいて対象物30の三次元画像を構成する3D画像構成部26と、を備える。
(もっと読む)
車両周辺監視システム
【課題】車載の撮像装置を通じて得られた画像において人間等の対象物体が背景に紛れ込んだ場合でも、この対象物体の存在を高精度で認識しうる車両周辺監視システムを提供する。
【解決手段】本発明の車両周辺監視システム10によれば、第1処理部11によって赤外線カメラ102を通じて得られた2値化画像における高輝度領域の輪郭Cが認識され、当該輪郭Cのうち対象物体Pの形状に応じた1次要件を満たす部分が1次輪郭部分C1として認識される。また、第2処理部により、1次輪郭部分C1の実空間位置が測定され、当該測定位置が対象物体Pのサイズに応じた2次要件を満たすか否かに応じて、1次輪郭部分C1が対象物体Pの輪郭部分である2次輪郭部分C2に該当するか否かが判定される。
(もっと読む)
非触覚ユーザインタフェース用場面プロファイル
【課題】非触覚検知に基づくコンピュータシステム用ユーザインタフェースを提供する。
【解決手段】非触覚インタフェースを実行するコンピュータに接続するディスプレイの近くに1人以上のユーザを有する場面の画像を獲得するステップと、前記画像を処理し、前記1人以上のユーザのプロファイルを生成するステップとを有する。コンテンツはその後、前記ディスプレイ上に上映するため前記プロファイルに対応して選択される。
(もっと読む)
141 - 160 / 1,659
[ Back to top ]