
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
1,641 - 1,659 / 1,659
結腸のポリープを検出するために切断面を用いる方法およびシステム
結腸のディジタル画像におけるポリープの識別方法が提供され、結腸のディジタル画像は3次元空間内のボクセルのドメインに対応する複数の強度から成る。本発明による方法は、画像に3つの互いに直交する軸のセットを付与するステップと、画像の軸に関して異なる方位にある複数の切断面を付与するステップと、画像の各ボクセルについて、中心ボクセルのまわりに切断面の各々を心出しするステップ(101)と、画像の各ボクセルのまわりの複数の切断面の各々について、結腸との切断面の交差を決定し、前記交差内での切断面のトレースを調べるステップ(102)と、各切断面のトレースが小さく丸い場合、交差におけるそれらのボクセルを以後の分析のためにマークするステップ(103)とを含む。 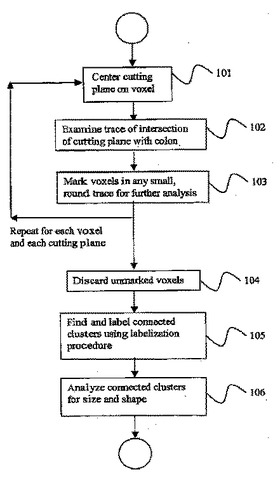 (もっと読む)
(もっと読む)
脈管構造の局部画像を自動的に配向する方法及びシステム
D次元空間内の複数の点から成るドメインに対応する複数の輝度から成るディジタル画像中の管状構造を配向する方法を提供する。この方法は画像ドメイン内の1つの点を選択し(101)、選択された点の近傍において画像の勾配を計算し(102)、選択された点における基本構造を計算し(102)、選択された点の構造テンソルを求め(103)、構造テンソルの固有値を見つける(104)ステップを含む。最小固有値(105)に対応する固有ベクトルは管状構造と整列する。管状構造と整列する固有ベクトルによって画定される軸を中心とするカートホイール投影を計算(106)すればよい。 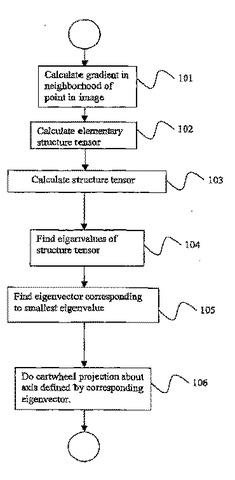 (もっと読む)
(もっと読む)
形状分析を用いる摺りガラス様結節(GGN)のセグメンテーション方法およびシステム
本発明は、医用画像における関心体積に包含されており、かつマルコフ確率場処理によりセグメンテーションされる摺りガラス様結節のセグメンテーション方法に関し、この方法においては、VOIにおける血管を識別し、血管をセグメンテーションし、セグメンテーションされた血管をセグメンテーションされたGGNから除去する。 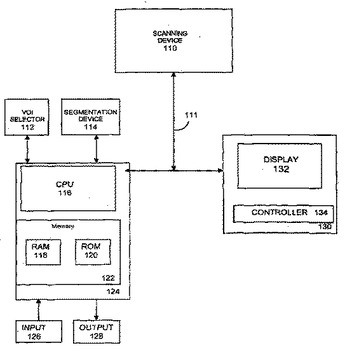 (もっと読む)
(もっと読む)
ガイドポイントを使用する空間−時間モデリングシステム及び方法
対象の空間−時間(4D)モデリング用の方法及びシステムは、3Dモデルを形成するための時間点と同一時間点で4Dモデルをサンプリングすることを有している。それから、この3Dモデルは、ユーザが供給したガイドポイント、画像フォース(例えば、画像エッジ)及び先行の形状モデルに基づいて適合される。3Dモデルの適合が完了すると、全4D形状モデルが更新される。心臓画像は、空間−時間的にモデリングされて、左心室(LV)の状態を決定することができる。 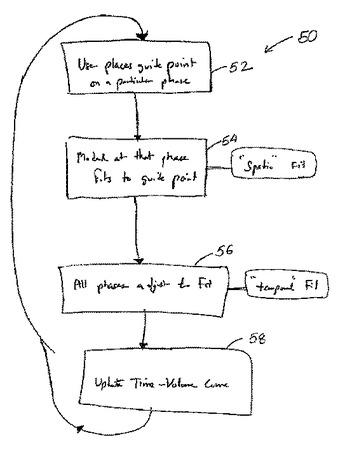 (もっと読む)
(もっと読む)
映像に基づいたフォトリアリスティックな3次元の顔モデリング方法及び装置
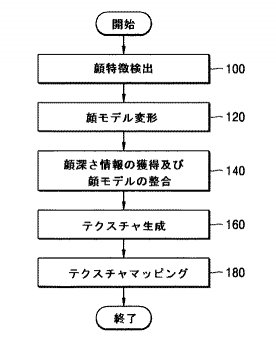
【課題】 映像に基づいたフォトリアリスティックな3次元の顔モデリング方法及び装置を提供する。
【解決手段】 描写された多角形のメッシュモデルによって表現される3次元のフォトリアリスティックな顔モデル生成方法において、入力映像の正面及び側面の顔映像内の顔特徴を検出する段階と、特定顔の3次元形状を決定するために、検出された顔特徴を利用して初期モデルを変形させて3次元の顔モデルを生成する段階と、入力映像からフォトリアリスティックなテクスチャを生成する段階と、前記テクスチャを前記3次元モデル上にマッピングする段階と、を含むことを特徴とする3次元の顔モデリング方法。これにより、デジタルカメラのように相対的に高価ではない装置を利用してデータを獲得し、可能な限り自動化を具現して、完全でない入力データから望ましく実際の人間らしい顔のモデ
リング方法を提供する。
(もっと読む)
有界三次元対象物の分類と空間ローカライゼーションのためのコンピュータ視覚システム
本発明は、有界三次元対象物の認識、分類、および空間ローカライゼーションのためのシステムと方法に関する。特には、対象物の認識、分類、およびローカライゼーションのためのコンピュータ化された方法に関する。本方法は、カメラにより記録された、または対象物のCAD表現を使用して構築された多数のトレーニング図に基づいて、トレーニングデータベースを生成することを含む。特徴的曲線は、トレーニング図から導出され、曲線のプリミティブが検出される。フィーチャの本質的および非本質的記述子が、対象物のクラスおよび図の姿勢状態に関するデータと共にデータベースに格納される。最終的には、認識は二段階で行われる。最初は、認識図の本質的記述子がデータベースの記述子と比較される。二番目に、最良の整合フィーチャから、どのフィーチャが、同じ姿勢状態にある同じ対象物クラスであることを示唆するという意味で、相互に一致するかが調べられる。 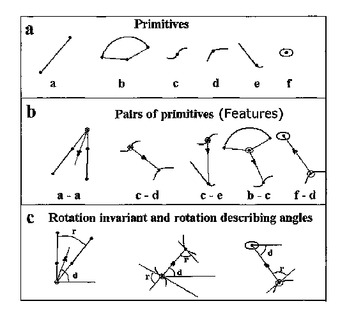 (もっと読む)
(もっと読む)
画像処理装置および方法

【課題】RGBの値を独立に変更する従来の色調整方法では思った色に調整しにくく、一方、色相と彩度で調整する方法では、RGBとは異なる色空間のため理解しにくく、また、色相と彩度とを独立に操作するのが難しかった。
【解決手段】ユーザーが3次元座標指定手段101により3次元位置を指定すると、ジオメトリ演算手段107はユーザー指定3次元座標情報に基づき、3次元座標演算を行い、3次元画像レンダリング手段104は、ジオメトリ演算後の中間情報に基づき3次元GUI画像を生成し、画像表示手段105は3次元GUI画像を表示する。一方、色度座標射影手段106はユーザー指定3次元座標情報に基づき、色度座標へ射影を行い、色調整の目標点を算出し、変換行列算出手段102は目標点情報と基準点情報から変換行列を算出し、色変換手段103は変換行列要素情報を入力画像信号に乗算し、色調整された画像信号を出力する。
(もっと読む)
アフィン変換を用いたモダリティ内医療体積画像の自動登録
患者の共通領域の現行診断画像及びアーカイブ診断画像が第1メモリ(14)及び第2メモリ(18)にロードされる。診断画像は、特徴画像(24)に変換され、スケーリングされ(40)、正規化される(42)。アフィン変換判定プロセッサ(50)は、現行画像とアーカイブ画像との間の誤差を表すアフィン変換を生成する。変換処理手段(90)は、アフィン変換によって診断画像のうちの一方を処理して、2つの画像を登録させる。ディスプレイ・プロセッサ(104)は、登録された第1画像及び第2画像の断面の相当する対をモニタ(22)上に表示する。ステップ・プロセッサ(102)は、登録画像の表示断面対を、連係して一緒に進めさせる。 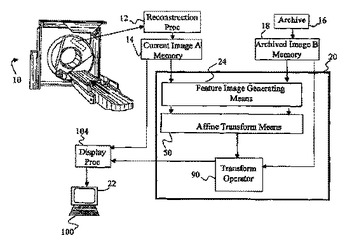 (もっと読む)
(もっと読む)
3次元メッシュ情報の符号化及び復号化方法並びにその装置
本発明は、3次元メッシュ情報の符号化及び復号化方法並びにその装置に関するものであり、特にデータデコーディング過程で原本データの座標情報のけたを考慮してデータを出力することによりデータ復元の精密度を高めることができる3次元メッシュ情報の符号化及び復号化方法並びにその装置に関するものである。精密なデータ復元のため本発明は、送信端末で原本データをエンコーディングする中に原本データの座標のけたを計算した後、エンコーディングされた原本データ及びけた情報を含む3DMCパケットを生成する3次元メッシュ情報の符号化ステップと、生成された3DMCパケットを受信端末に転送するステップと、受信端末でけた情報を利用してエンコーディングされた原本データを復元して出力する3次元メッシュ情報の復号化ステップとを含む。 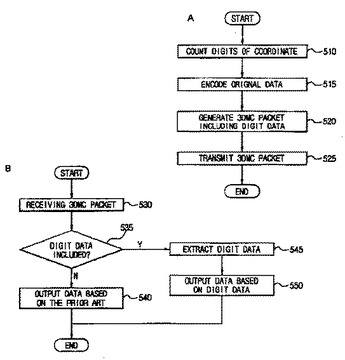 (もっと読む)
(もっと読む)
手術用ナビゲーションシステム(カメラプローブ)
【課題】手術部位内のナビゲーションのシステム及び方法を提供する。
【解決手段】本発明に係わる実施形態では、トラッキング装置でトラックされる、携帯のナビゲーションのプローブに、マイクロカメラを設けている。これにより、プローブ内に設けたマイクロカメラの視点からのリアルタイム画像を見ながら、手術場面内でナビゲーションが可能となる。手術場面には、術前の走査から生成された対象構造のコンピュータ3次元画像が、重ね合わされている。カメラ画像および重ね合わせ3次元画像の透明性の調整で、深さの認識を強めることができる。プローブ先端と重ね合わせの3次元構造との距離、すなわちプローブから延びた仮想の放射線に沿った距離が、組合せた画像に動的に表示される。本発明の実施形態では、仮想インターフェイスが、組合された画像に隣接してシステムの表示装置に表示される。これによりナビゲーションに関わる機能が促進される。 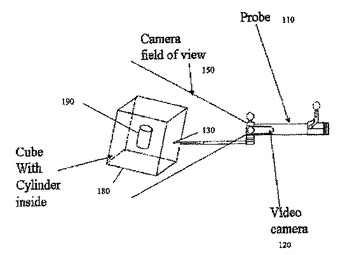 (もっと読む)
(もっと読む)
仮想結腸鏡検査法のためのローカルパス自動プランニング方法及び装置
本発明は、仮想内視鏡検査法のためのローカルパス自動プランニング方法に関しており、後続するステップにおける利用のために結腸検査プロトコルによって得られる結腸データセットを導出するステップと、管腔内の目下の内視鏡位置周辺のサブボリュームを確定するステップと、前記目下の内視鏡位置から開始して当該管腔内部で成長する領域を実行するステップと、前記サブボリュームに外接する立方体の複数の面と前記領域との交差を計算しクラスタリングするステップと、前記目下の内視鏡位置から先行ステップにて形成された各クラスタの中心までの概算的センターラインパスを計算するステップと、前記センターラインパスの各々を内視鏡によって示される目下のパスと比較するステップと、前記センターラインパスの各々に対して前記比較に基づく評点を割当てるステップと、前記評点に基づいてセンターラインパスを選択するステップとが含まれている。 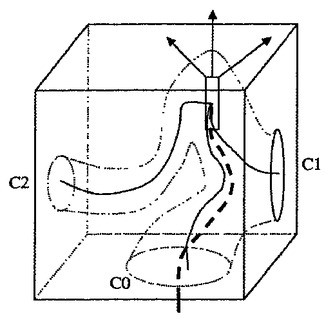 (もっと読む)
(もっと読む)
ボクセルデータ符号化方式
【課題】ボクセルデータの効率化を図り、且つ可逆圧縮を可能とすること。
【解決手段】カメラ群9−1により3次元対象物を撮影し、キャプチャデバイス9−3にてボクセル生成装置9−2に取り込む。撮影された映像はシルエット生成処理部9−4にてシルエットのみ抽出される。そしてボクセル生成手段判定部9−5にて、シルエットの分布に最適なボクセル生成手法を選択し、ボクセル空間を生成する。さらにボクセル符号化部9−6にてボクセルの分布から最適な符号化方式を選択し、符号化する。符号化されたデータはネットワーク伝送処理部9−7にて送信され、ネットワーク9−8を経由してネットワーク伝送処理部9−10にて受信される。ボクセル復号化部9−11ではどの符号化方式で符号化されたかを判定して、復号化を行う。ボクセル空間再構成部9−12では復号化されたデータからボクセル空間を再構成する。3次元空間生成部9−13ではボクセル空間を3次元CGなどで3次元表現を行う。
(もっと読む)
三次元画像表示方法及びそれに使用する三次元画像表示装置
【課題】 三次元オブジェクトのデータがバッファに順次書き込まれるのに伴ってモニタに個々のオブジェクトの姿が順次表示されてゆくか、または全ての三次元オブジェクトのデータがバッファに書き込まれた後にモニタに全てのオブジェクトの姿が一斉に表示されるかのいずれかであったため、一つの画面が完成するまでどの程度の待ち時間があるのか、または現在どの程度描画が進んでいるのか等の情報が与えられない。
【解決手段】 予め二次元画像として初期三次元画像を用意し、この二次元画像にはたとえば「フォグ(霧)効果」等のような色を抑えるためのフィルタ処理を行なっておく。そして最初の1回のみそのようなフィルタ処理を行なった画像を表示する。即ち、一番最初だけ初期三次元限画像を二次元化した画像が色を抑えた画像として表示され、それ以降は順次三次元画像が二次元画像上に重畳して表示される。
(もっと読む)
画像処理装置および方法、記録媒体、並びにプログラム
【課題】 任意の図形を分割後の面積ができる限り均一に分割する。
【解決手段】 ステップS11で、分割する対象領域と、その分割数Nが指定される。ステップS12で、対象領域を占める総画素数Totalが取得される。ステップS13で、パラメータkが1に初期化され、ステップS14で、第k番目の分割領域Skの理想値St[k]が算出される。ステップS15で、理想値St[k]に基づいて第k番目のセクションSkの画素数の決定値Sd[k]が決定される。
(もっと読む)
光断層画像診断情報出力装置
【課題】 光断層画像を用いた光断層画像診断情報出力装置において、病理医による病理診断が不可能または困難であっても、迅速な病理診断を可能とする。
【解決手段】 ファイバカプラ121 において、光源部100 から出射された低コヒーレンス光を、被測定組織10に照射する信号光とピエゾ素子124 で周波数シフトされる参照光とに分割し、また被測定組織10の所定の深部で反射された信号光と参照光とを合波する。この合波された干渉光の信号強度をバランス差分検出部150 で検出し、信号処理部160 で画像処理を行い、被測定組織10の光断層画像を取得し、モニタ13および診断情報出力部180 に出力する。診断情報出力部180 ではこの光断層画像と、予め正常組織から取得して記憶部170 に記憶された基準光断層画像のパターンマッチングを行い、両形状パターンがほぼ一致する場合には被測定組織10が正常組織であるとモニタ13に出力し、表示する。
(もっと読む)
3次元仮想現実を表示するシステム及び方法
【課題】 3次元仮想現実画像を出力表示するときに色順応を自然に表現する。
【解決手段】 3次元仮想現実画像の表示において、画像を入力し、また、照明条件を入力する。時間経過を表わすパラメータを含む色順応予測式を用いて、照明条件の変化に順応する途中の対応色を連続的に予測し、予測した対応色を用いて画像を連続的に補正して表示する。
(もっと読む)
実立体モデル作成装置、立体データ作成装置、疑似立体データ作成装置並びにその方法
【課題】 レーザ光を対象物上にスキャンして三次元形状データを得るには、そのスキャンにかなりの時間がかかりその間対象物が静止している必要があり、人物などの三次元形状データを得るのは、難しいという問題があった。
【解決手段】 データ入力部10において、カメラを用い対象物の複数の画像を得る。この画像に基づいて、モデリング部12において、色彩データを含む三次元形状データを得る。この三次元形状データに基づいて成形部14において実立体モデルを成形する。これは切削や成形型による成形によって行われる。そして、色づけ部16により、色彩データに基づいて、実立体モデルに対し色づけが行われる。
(もっと読む)
3次元形状データの統合処理方法および3次元形状データの表現方法
【課題】 統合すべき部分形状のポテンシャル方向が大きく異なる場合でも、正確な統合が可能な統合処理方法を提供する。
【解決手段】 部分形状データ10および20は位置合わせを行った段階では異なる曲面を構成しているので、それぞれの形状ベクトルV1およびV2は独立しているが、部分形状データ10および20を形状ベクトルを用いて表現し、形状ベクトルの演算により部分形状データ10および20を統合することで統合後の形状ベクトルV3を得る。
(もっと読む)
画像復元方法
【課題】本発明は、十分に復元された復元像を得ることができる画像復元方法を提供する。
【解決手段】ステップ101〜104でn次元の理想像モデルの初期値を設定すると共に、n次元のPSFモデルの初期値として周波数空間でデルタ関数となる分布を設定し、ステップ105で制限条件と終了条件を与えた後、ステップ106〜114で理想像モデルを実空間あるいは周波数空間で像とPSFモデルにより修正し、実空間の理想像モデルに対して実空間の制限を加え、PSFモデルを実空間あるいは周波数空間で像と理想像モデルにより修正し、周波数空間のPSFモデルに対して周波数空間の制限を加えた後実空間に変換し、実空間のPSFモデルに対して実空間の制限を加える処理を、ステップ115で所定の終了条件を満たすまで繰返し実行し、最終的な理想像モデルを復元像として生成する。
(もっと読む)
1,641 - 1,659 / 1,659
[ Back to top ]