
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
1 - 20 / 1,659
同期されたユーザインタフェース機能を含むマシンビジョンシステムプログラム編集環境
通過車両検知装置
画像処理装置およびその方法
人検出装置、人検出方法及び人検出プログラム
画像処理装置、および画像処理方法、並びにプログラム
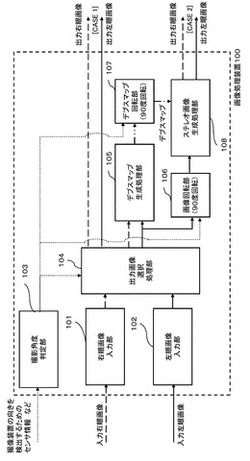
【課題】2眼カメラの横持ち撮影、縦持ち撮影いずれの場合にも3D表示可能なステレオ画像を出力可能とした装置、方法を提供する。
【解決手段】異なる視点から撮影された左眼画像と右眼画像を入力画像として入力する画像入力部と、入力画像の撮影時のカメラの角度に応じた制御信号を出力する撮影角度判定部と、制御信号が、2眼カメラの横持ち撮影による横持ち撮影画像であることを示す場合、前記入力画像である左眼画像と右眼画像を出力し、記制御信号が、2眼カメラの縦持ち撮影による縦持ち撮影画像であることを示す場合、左眼画像または右眼画像のいずれか一方の画像をステレオ画像生成処理部に入力し、ステレオ画像生成処理部において1枚の画像に基づく2D3D変換処理によって生成した左眼画像と右眼画像を出力する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム

【課題】視差画像をより高い精度で補正できる画像処理装置、画像処理方法および画像処理プログラムを提供する。
【解決手段】画像処理装置は、被写体を異なる視点で撮像することで取得された少なくとも2つの入力画像から視差画像を生成するための視差画像生成手段と、視差画像生成手段によって生成された視差画像に含まれる画素についての信頼度を算出するための信頼度算出手段と、視差画像生成手段によって生成された視差画像を補正して出力するための視差画像補正手段とを含む。視差画像補正手段は、視差画像生成手段によって生成された視差画像に含まれる被補正画素の周辺にある画素の信頼度および色情報に基づいて、当該被補正画素についての補正画素候補としての適性を算出するための適性算出手段と、算出された適性に基づいて、当該被補正画素の補正に用いる画素を決定するための決定手段とを含む。
(もっと読む)
ステレオ画像生成装置、ステレオ画像生成方法及びステレオ画像生成用コンピュータプログラム
【課題】各カメラによる画像上で特徴点が偏在している場合に算出された補正パラメータが適切か否かを判断可能なステレオ画像生成装置を提供する。
【解決手段】ステレオ画像生成装置は、被写体が写った第1及び第2の画像から抽出された被写体上の同一の点に対応する複数の特徴点の組に基づいて補正パラメータを算出する補正パラメータ算出部12と、各特徴点の組について補正パラメータを用いて少なくとも一方の画像上の特徴点の位置を補正して、補正後の特徴点間の距離を求めることで補正誤差量を算出する補正誤差算出部13と、特徴点の偏在度を求める偏在度算出部14と、偏在度が大きいほど補正誤差量に対する閾値を小さくするようにその閾値を決定する閾値決定部15と、補正誤差量が閾値以下である場合に補正パラメータを用いて第1及び第2の画像のうちの少なくとも一方における被写体の位置を補正する補正部17とを有する。
(もっと読む)
カメラキャリブレーション装置、乗員支援装置、カメラキャリブレーション用歪み係数生成方法
【課題】広角レンズの歪みを、容量の小さなメモリで高精度に補正するカメラキャリブレーション装置を提供すること。
【解決手段】カメラ50と歪み校正用被写体の相対位置情報から歪みのない理想結像位置を算出する理想結像位置算出手段12と、校正用被写体が撮影された画像からレンズの歪みを含んだ実測結像位置を検出する実測結像位置検出手段11と、結像位置に応じた重みを生成するための重み関数を決定する重み関数決定手段14と、歪み係数を用いて算出される歪み量が含まれる理想結像位置と実測結像位置、及び、結像位置に応じて前記重み関数が生成した重みを、歪み係数の評価関数に入力して、評価関数の演算結果から歪み係数を決定する歪み係数決定手段13と、を有することを特徴とするカメラキャリブレーション装置を提供する。
(もっと読む)
超音波診断装置及び画像処理装置
【課題】管腔内を簡便に観察することができる超音波診断装置及び画像処理装置を提供すること。
【解決手段】実施の形態の超音波診断装置は、トレースライン設定部と、カーブドMPR画像生成部と、制御部とを備える。トレースライン設定部は、超音波プローブから送信される送信信号を被検体に3次元的に走査することで収集された3次元画像データに含まれる管腔に芯線を設定する。カーブドMPR画像生成部は、トレースライン設定部によって設定された芯線を含む断面の2次元画像を、3次元画像データから当該芯線に沿って生成する。制御部は、カーブドMPR画像生成部によって生成された2次元画像を所定の表示部にて表示させる。
(もっと読む)
画像処理装置および画像処理方法
【課題】三次元空間にある被写体の表面形状を曲面パッチを用いて推定することで、特に曲面部分についての推定精度を向上させる。
【解決手段】被写体の多視点画像とそのカメラ位置情報を入力し、特徴点抽出部805で各画像における特徴点を抽出する。そして、特徴点三次元パッチ作成部806で、各画像の特徴点に対応する、曲面からなる特徴点三次元パッチを作成し、さらにパッチ追加部807で、特徴点三次元パッチ周辺に、曲面からなる追加三次元パッチを作成する。
(もっと読む)
画像処理装置
【課題】ステレオカメラから得られた情報をもとに、夜間のさまざまな光点の中から、対向車のヘッドライトや先行車のテールライトのみを抽出し、ドライバーにとってより安全な視界を提供する。
【解決手段】第1の撮像素子と第2の撮像素子で撮像した2つの画像から検知対象物候補までの第1の距離情報を算出する第1の距離情報算出手段と、第1の撮像素子で撮像した画像から検知対象物候補までの第2の距離情報を算出する第2の距離情報算出手段と、第1の距離情報と第2の距離情報を比較し、比較した比較結果に基づいて検知対象物候補から対象物を検知する対象物検知手段と、を有する。
(もっと読む)
三次元計測装置
【課題】位相シフト法を利用した三次元計測を行うにあたり、より高精度な計測を実現することのできる三次元計測装置を提供する。
【解決手段】基板検査装置1は、プリント基板2に対し縞状の光パターンを照射する照射装置4A,4Bと、これを撮像するカメラ5と、撮像された画像データを基に三次元計測を行う制御装置6とを備えている。制御装置6は、第1照射装置4Aから第1光パターンを照射して得られた画像データを基に第1計測値を取得し、第2照射装置4Bから第2光パターンを照射して得られた画像データを基に第2計測値を取得する。そして、両光パターンが照射される全照射領域に関しては、両計測値から特定される値を当該領域の高さデータとし、いずれか一方のみ照射される一部照射領域に関しては、前記全照射領域の高さデータから算出した補完データを基に当該領域に係る計測値の縞次数を特定し、当該領域に係る高さデータを取得する。
(もっと読む)
単眼カメラ画像によるステレオ視に基づく運動量推定方法、及び当該方法を使用する運動量推定装置
【課題】単眼ステレオ視に基づく運動量推定を実施するに当たり、演算負荷を軽減しつつ、運動量及び三次元座標を高精度に算出する方法を提供する。
【解決手段】単眼カメラによって撮像された画像を用いるステレオ視に基づく運動量推定を行うに当たり、個々のオプティカルフローの向きを考慮して、異なる向きを有するオプティカルフローを形成する特徴点を効率的にサンプリングして基礎行列の算出に用いる。具体的には、基礎行列の算出に用いるオプティカルフローを形成する特徴点のサンプリングにおいて、サンプリングされた特徴点をオプティカルフローの向きに基づいて所定数のグループに振り分け、複数の特徴点が振り分けられたグループについては特徴点を1つに収束させ、特徴点が振り分けられなかったグループについては改めて特徴点を選択する処理を繰り返して、全てのグループに特徴点が1個ずつ属する状態とし、これらの特徴点に基づいて基礎行列を算出する。
(もっと読む)
運転支援システム、運転支援方法、及び、プログラム
【課題】比較的軽い処理で運転者の支援を行う運転支援システムを提供する。
【解決手段】 運転支援システム1は、動領域抽出によって、領域分割(撮影画像を画像要素に分割する処理)と、視差情報の抽出(視差マップの生成処理)とを行うため、ブロックマッチングを用いる方法に比べて、処理負荷を抑えることができる。また、右画像と左画像の同一画像要素を特定し、視差を算出する場合には、精細なカメラの校正と画像の補正が必要であるが、本運転支援システム1では、これらは不要である。さらに、本運転支援システム1によれば、動きや形の変化を推定するため、他の移動体に相当する画像要素の多様な動きや、形の変化にも対応できる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】対象物体までの距離を測定する際に、距離精度を向上させ、従来より遠い距離の対象物でも正確な距離を測定することができる画像処理装置及び画像処理方法を得ること。
【解決手段】一対の撮像素子で同時刻に同方向を撮像した一対の画像の一方の画像から対象物の画像を含む一方画像対象物領域302を抽出する。そして、一方画像対象物領域302を構成する複数の画像構成部分についてそれぞれ対象物画像構成部分304と背景画像構成部分303のいずれであるかの確度である背景度を算出する。そして、背景度を用いて他方の画像501内から一方画像対象物領域302と類似した画像を有する他方画像対象物領域503を抽出して、一方画像対象物領域302と他方画像対象物領域503との視差を算出する。
(もっと読む)
画像処理装置、表示装置、画像処理方法及び画像処理プログラム
【課題】色相のずれを軽減しつつ視野闘争を軽減したアナグリフ画像を生成する。
【解決手段】画像に含まれる画素毎に、第1の色成分の画素値と該第1の色成分以外の他の色成分のうち少なくとも一方の画素値との差を変更し、かつ他の色成分同士の画素値の差を変更する画素値変換部を備える。前記画素値変換部には差分算出部を備え、前記画素値変換部は、各画素において、前記差分算出部が算出した差分に基づいて、前記第1の色成分の画素値と前記他の色成分の画素値の差及び前記他の色成分同士の画素値の差を小さくする。
(もっと読む)
映像処理装置及び方法
【課題】 レンダリングのための遠近効果の過程において入力深度映像のホールフィリングを極めて迅速に行いながら信頼できる結果を提供する映像処理装置及び方法を提供する。
【解決手段】 入力深度映像が入力されれば、映像処理装置のアウトライアー除去部は全体ピクセルの深度値を分析して平均的な値に一定の程度以上を離れたピクセルを除去し、単独に処理する。そして、ホールをフィリングして入力深度映像を再生成する。この過程において、プッシュプル方法のホールフィリング処理が行われる。
(もっと読む)
地物情報判読用画像生成方法
【課題】SAR画像等の単偏波レーダ画像と多偏波レーダ画像とを組み合わせて、より正確な地物情報の判読が可能な合成画像を生成する。
【解決手段】飛翔体に搭載したレーダ装置から得られる、偏波を利用して撮影されたレーダ画像データを基に地物情報判読用画像を生成する際、まずレーダ装置で撮影された地域の低解像度の多偏波レーダ画像データの各々に色情報を割り当てる。次に、その色情報が割り当てられた低解像度の多偏波のレーダ画像データと、レーダ装置で撮影された地域の高解像度の単偏波レーダ画像データを合成し、高解像度のカラーレーダ画像データを得る。
(もっと読む)
医用画像診断装置及び画像処理装置
【課題】サムネイルによる画像の識別を向上させることができる医用画像診断装置及び画像処理装置を提供することである。
【解決手段】実施の形態の医用画像診断装置では、モニタと、表示制御部とを備える。モニタが、所定の視差角ずつ視点位置を移動させてボリュームレンダリング処理を行なうことで生成された視差画像群を表示することで立体視可能な画像である立体視画像を表示する。そして、表示制御部が、医用画像を縮小したサムネイルを立体視画像として表示するための縮小視差画像群をモニタにて表示させる。
(もっと読む)
車両周辺監視装置
【課題】画像から検知された監視対象物の存否及び位置を極めて容易に把握可能な車両周辺監視装置を提供する。
【解決手段】第1表示部(26)と、第2表示部(28)と、1つのサブ領域(74、76、78)から2以上の監視対象物(H1〜H3)が検知されたか否かを判別する検知数判別部(52)とを備える。検知したと判別された場合、第2表示部(28)は、2以上の監視対象物(H1〜H3)が存在する旨を示す第1モード、及び2以上の監視対象物が存在する位置を示す第2モードに順次切り替えて各マーク(94、96、98、100)を表示する。
(もっと読む)
1 - 20 / 1,659
[ Back to top ]