
Fターム[5B057CD00]の内容
画像処理 (340,757) | 処理部 座標変換 (9,303)
Fターム[5B057CD00]の下位に属するFターム
線型変換(アダマール変換) (6,458)
非線形変換、変形 (1,267)
異なる次元間の変換 (978)
特殊座標系への変換 (165)
その他の座標変換 (416)
Fターム[5B057CD00]に分類される特許
1 - 19 / 19
高速障害物検出
【課題】移動する構造物を有する環境における画像システムおよび方法の提供。
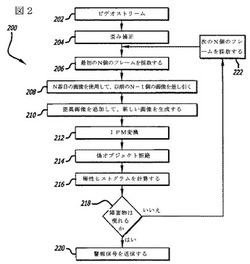
【解決手段】障害物を検知するためのシステムであって、装置上に配置されて、装置が移動中である運動の領域の画像のビデオストリームを取り込む1台のカメラと、前記画像のビデオストリームを受信し、ビデオストリーム内で受信されるN個の画像のシーケンスからN番目の画像フレームを選択することと、N番目の画像からN−1個の以前の画像のそれぞれを差し引くことによってN−1個の差異画像を決定することと、N−1個の差異画像を足し合わせて、結合された差異画像を生成することと、結合された差異画像に透視変換を実行して、変換画像を生成することと、変換画像内の障害物の端縁を検知することと、運動の領域内での障害物の検知を示す信号を生成することと、によって画像のビデオストリームを処理するように構成される障害物検知機能と、を備えるシステム。
(もっと読む)
運動対象輪郭抽出装置、左心室画像分離装置、運動対象輪郭抽出方法及び左心室画像分離方法

【課題】運動段階が異なる各画像内の運動対象の輪郭を正確に取得すること。
【解決手段】実施形態の運動対象輪郭抽出装置は、輪郭取得部と、輪郭補正部とを備える。輪郭取得部は、各画像スライス内の運動対象の輪郭を取得する。輪郭補正部は、複数の時系列画像スライスそれぞれにおける前記運動対象の運動傾向情報に基づいて、少なくとも1つの時系列画像スライスの各画像スライス内の前記運動対象の輪郭を補正する。
(もっと読む)
画像処理装置及びプログラム
【課題】2つの画像間において、ユーザが指定した一部分同士の比較を可能とすること。
【解決手段】本発明に係る画像処理装置100は、第1画像と第2画像を受け付ける画像受付手段と、ユーザが前記第1画像に対し第1指定領域を指定する第1指定領域指定手段と、前記第1指定領域に基づいて前記第1画像に対し第1比較領域を設定する第1比較領域設定手段と、前記第2画像に対し第2比較領域を設定する第2比較領域設定手段と、前記第1比較領域中の第1比較画像と前記第2比較領域中の第2比較画像の幾何学的関係を補正する幾何学的関係補正手段と、前記第1比較画像に前記第2比較画像を重畳した画像または、前記第1比較画像と前記第2比較画像との差分画像を出力する画像出力手段と、を有する。
(もっと読む)
画像処理装置
【課題】撮像装置によって撮影された画像が陽炎によって画質劣化したとき、画質の劣化を補正し、揺らぎのない良好な画像を得ること。
【解決手段】参照画像推定部1と、オプティカルフロー計算部2と、動き補正部3を用いて画像処理装置102を構成して、逐次入力される入力画像から動きのない画像(参照画像)を推定し、入力画像および参照画像に基づいてオプティカルフローを計算して入力画像の局所的な揺らぎ(動きベクトル)を算出し、該動きベクトルに基づいて陽炎の揺らぎを相殺するように入力画像の部分画像を移動して入力画像中に存在する陽炎の揺らぎを取り除いた補正画像を生成するようにした。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】一つのマーカーから複数の特徴点を安定して抽出することを課題とする。
【解決手段】画像処理装置200は、マーカー画像上の中心点の位置とマーカー画像上の境界線の位置とに基づいて、マーカー画像の歪みが補正されるように正規化変換する。次に、画像処理装置200は、白領域と黒領域との交差点が存在する可能性が高いほど大きな応答値が得られるフィルタを用いて正規化画像を走査し、フィルタの応答値がピークとなる正規化画像上の位置を取得する。そして、画像処理装置200は、正規化画像を逆変換することにより、正規化画像上でフィルタの応答値がピークとなる位置に対応するグレースケール画像上の位置を取得し、この位置を特徴点に決定する。
(もっと読む)
運転支援表示装置
【課題】車両後方、又は前方の、前、左右、及び下方向の広い範囲の撮像から表示において、目的に応じた視認性の高い被写体の形状表示、被写体と車両の方向性や位置関係の視認性向上、及び画面上で移動する被写体に対する目線の移動を容易にする運転支援表示装置を提供する。
【解決手段】車両前後方向、車両前後方向から垂直に下の方向、水平に左の方向、水平に右の方向、にそれぞれ垂直な平面上の正方形の被写体が、各方向に対応した領域内で同じ大きさの正方形又は長方形に表示される前方向補正画像表示領域41−1と他の表示領域が隣接配置され、隣接付近の表示画像は一致し、水平な地面に垂直或いは車両左右方向の直線と一致する直線である。更に、左方向補正画像表示領域41−3L、又は右方向補正画像表示領域41−3Rの下辺と、下方向補正画像表示領域41−2の左辺、又は右辺は同じ位置の車両前後方向直線と一致する直線である。
(もっと読む)
画像表示装置
【課題】画面に表示される補助的な画像から直感的に車体の誘導を可能にする画像表示装置を構成する。
【解決手段】後部カメラ28の撮影画像をモニタ21に表示する画像処理部38を備えている。この画像処理部38は、モニタ21に表示されている撮影画像に対して距離感を有する遠近感イメージを重畳表示する合成処理手段38Fを備えると共に、遠近感イメージをモニタ21の視野内に固定して重畳表示する視野固定モードと、路面と一体的にスクロールする形態で重畳表示する路面固定モードとの選択を実現する表示モード設定手段38Aを備えた。
(もっと読む)
処理装置
【課題】立体物をポリゴンメッシュでモデリングしディスプレイに描画するための前処理として行われるジオメトリ処理を行う。
【解決手段】ジオメトリ処理のうち、頂点処理は頂点ごとに別々のプロセッサに分担して行わせ、そこで得られる処理済み頂点データをプロセッサ間で通知し、三角形ストリップ、独立三角形の処理時において異なるタイミングで座標変換処理、勾配算出処理合うことにより、各プロセッサにおいてポリゴン処理を行うことを可能にする。各プロセッサでは、頂点処理終了後に連続的にポリゴン処理を実行できるので、頂点処理とポリゴン処理との実行タイミングにアンバランスが発生しにくくなり、従って、プロセッサの遊び時間が少ない効率良い演算を行うことができる。
(もっと読む)
画像処理システム及びプログラム
【課題】被写体の位置や向きが変化しても、被写体に同じ座標系を設定する。
【解決手段】画像処理システム1は、被写体を撮像した撮像画像を取得し、取得される撮像画像において被写体が写し出された被写体撮像領域に外接する最小の矩形領域を設定し、設定された最小の矩形領域と被写体撮像領域との関係に基づいて、最小の矩形領域に基づく座標系を被写体に対して設定する。
(もっと読む)
外界認識装置
【課題】処理負荷の低減と検出精度の向上を図ることができる外界認識装置を提供する。
【解決手段】車両10に設置された複数のカメラ201〜203で撮像される車両周囲の画像を利用して認識対象Pを認識する外界認識装置は、入力されるパラメータに応じて、前記各画像の座標変換と合成を行い、合成画像を作成する合成変換部104と、合成変換部104で作成された合成画像に対して画像処理を行い、認識対象を認識する認識部と105と、認識部105によって認識された認識結果に基づいてパラメータを生成するパラメータ生成部108を有する。
(もっと読む)
電子情報ボードシステム、コンピューター端末およびキャリブレーション方法
【課題】射影変換パラメーターの誤差を軽減し、より正確なキャリブレーションを行なう電子ボード情報システムを提供する。
【解決手段】プロジェクターが、投影画像内における座標位置を示す指標が含まれるキャリブレーション画像を投影し、カメラが、プロジェクターによってキャリブレーション画像が投影された領域を撮像し、コンピューター端末が、カメラによって撮像された撮像画像を、複数の画像に分割し、分割された複数の画像のそれぞれについて、画像に含まれる指標に基づいて撮像画像を投影画像に射影変換するための射影変換パラメーターを算出し、算出された射影変換パラメーターに基づいて、カメラによって撮像された撮像画像を投影画像に射影変換する。
(もっと読む)
ロボットシステム
【課題】カメラ、制御装置および通信手段の能力に依存することなく、ロボットに搭載されたカメラの正確な位置合わせが容易なロボットシステムを提供する。
【解決手段】画像合成部36は、記憶部34に記憶されている平面画像データ40に基づいて合成画像55を作成する。そのため、カメラ19、制御装置12あるいは通信部13の能力によって撮影している画像と表示している画像との間に時間差が生じるときでも、操作者30は表示部37に表示されている合成画像55を参照してロボット11を操作可能である。データ更新部38は、新たな平面画像データ40のための記憶領域が不足するとき、記憶部34のデータグループのうち属する平面画像データ40の数が最も多い最多データグループ62を選択し、この最多データグループ62から合成画像55の作成のために選択された選択時刻が最も古い平面画像データ65を削除する。
(もっと読む)
コンピュータ断層撮影装置及び方法
【課題】本発明の目的は、コンピュータ断層撮影装置及び方法において、逆投影に要する補間処理を効果的に簡素化することにある。
【解決手段】コンピュータ断層撮影方法は、X線源50から逆投影画素を通る線形経路51に対応するX線検出器52上のチャンネル位置Chを決定する段階と、X線源50から逆投影画素Chまでの距離から補間カーネル幅ΔChを決定する段階とを有する。
(もっと読む)
標識認識装置及び標識認識方法
【課題】認識対象に発光体標識と非発光体標識の両方が含まれる場合でも、その標識の内容を的確かつ比較的容易に認識することができる標識認識装置及び方法を提供すること。
【解決手段】標識認識装置100は、発光体標識照合部112と、非発光体標識照合部113と、候補領域画像の輝度分布に基づいて、候補領域画像が発光体標識の画像かあるいは非発光体標識の画像かを判断する輝度分布評価部104と、候補領域画像が発光体標識と判断された場合には発光体標識照合部112で照合を行わせ、候補領域画像が非発光体標識と判断された場合には非発光体標識照合部113で照合を行わせる照合制御部105とを有する。
(もっと読む)
画像処理装置
【課題】 画像処理のリアルタイム性を維持しながら、ネットワーク処理のような発生タイミングが一定でない処理を同時に行うことを可能にする技術を提供する。
【解決手段】 画像処理装置は、画像入力手段から得られた画像データを処理するための画像処理手段と、前記画像処理手段によって処理される画像データを格納する第1メモリと、前記画像処理手段と前記第1メモリとの間で前記画像データを転送する第1バスと、前記第1メモリから転送される画像データを格納する第2メモリと、前記第1メモリおよび第2メモリに接続される第2バスと、前記画像処理手段からの画像処理中ではないことを示す信号に応じて、前記第2バスを介して前記第1メモリに格納された画像データを前記第2メモリに転送する制御を実行する制御手段と、を有する。
(もっと読む)
表情認識装置及び方法、並びに撮像装置
【課題】予め特定の表情の画像を登録することを不要としながら、各個人の顔の特徴量をベースとして表情を判定することを可能とする。
【解決手段】表情認識装置は、順次に画像を入力し、入力された画像から検出された顔の画像情報に基づいて表情判定を開始するか否かを判定する。表情認識装置は、表情判定を開始すると判定された場合、その判定に応じて、画像から検出された顔の画像情報に基づいて参照特徴情報を取得する。そして、表情認識装置は、表情判定を開始すると判定した後に入力された画像について、検出された顔の画像情報から特徴情報を抽出し、当該抽出された特徴情報と上記取得された参照特徴情報とに基づいて、当該検出された顔の表情を判定する。
(もっと読む)
画像記録変換の選択を可能にするためのシステム及び方法
第1の画像データセット及び第2の画像データセットを互いに対応して表示するのに使用するための画像記録変換の手術中の選択を可能にするためのシステム及び方法である。画像データセット収集装置12、14は、前記第1及び第2の画像データセットを得る。前記第1及び第2の画像データセットが互いに対応している可能性を示す類似性関数がプロセッサにより計算され、次いで前記類似性関数の複数の極値の各々のランキングが決められる。複数の極大から得られる記録変換がディスプレイ18に示され、ユーザインタフェース22を用いて、記録変換が次に使用するための臨床上最適な記録変換であるかを視覚的に確かめるために、医師は各記録変換を選択することができる。 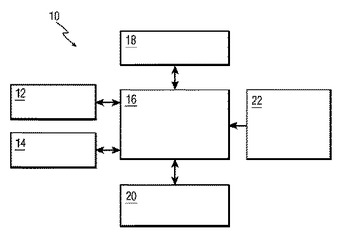 (もっと読む)
(もっと読む)
小型情報通信端末におけるコンテンツ提示装置、小型情報通信端末及びコンテンツ提示プログラム
【課題】コンテンツ閲覧時の可読性を確保しつつ一画面内に表示される情報量を増大させることができ、しかも操作が容易である小型情報通信端末におけるコンテンツ提示装置、小型情報通信端末及びコンテンツ提示プログラムを提供する。
【解決手段】Webページを取得する手段と、取得したWebページのコンテンツの表示対象領域を第1の部分領域及び第2の部分領域を含む互いに連続する複数の部分領域に分割する手段と、第2の部分領域のコンテンツを写像変換によって圧縮し、非圧縮の第1の部分領域のコンテンツと圧縮した第2の部分領域のコンテンツとを連続させたレンダリングイメージを生成する手段とを備えている。
(もっと読む)
画像処理装置
【課題】複数の処理手段を接続して成る処理パイプラインを迅速に構築して処理動作の高速化を図るようにすること。
【解決手段】本発明は、画像データを入力する処理手段(画像入力手段110)、画像データに対して所定の処理を施す処理手段および画像データを出力する処理手段(画像出力手段111)を含む複数の処理手段の接続を構成して画像データの処理パイプラインを構築する制御部105と、制御部105による処理パイプラインの構築において、他の処理手段との接続を構成するため各々の処理手段に設けられる接続管理手段とを有する画像処理装置において、制御部105が、処理パイプラインの構成を解消するにあたり、複数の処理手段のうち少なくとも1つにおける処理手段の接続管理手段による他の処理手段との接続を維持したままにしておくものである。
(もっと読む)
1 - 19 / 19
[ Back to top ]